






四叉树(Quadtree):四叉树是一种用于二维空间分割的数据结构。它将一个二维区域划分为四个象限,每个象限进一步细分为四个小块,以此类推。四叉树可以用于空间索引、图形学、地理信息系统(GIS)等领域。
八叉树(Octree):八叉树是四叉树的扩展,用于三维空间分割。它将一个三维区域划分为八个象限,每个象限进一步细分为八个小的三维体,以此类推。八叉树广泛应用于计算机图形学、虚拟现实、空间索引和机器学习等领域。
正交树(Orthtree):正交树是一种用于二维或三维空间分割的数据结构,其特点是每个节点代表一个正交区域,即各边相互垂直。正交树的分割方式使得它对于某些特定的几何形状(如矩形或立方体)特别有效。正交树在计算机图形学、空间索引和科学计算等领域有应用。
1、介绍
四叉树是一种树形数据结构,其中每个节点都包含一个方形空间,每个内部节点都有四个孩子。八叉树是一种类似的3D数据结构,其中每个节点都包含一个立方体空间,每个内部节点都有八个孩子。
我们将这种数据结构的泛化称为“正交树”,因为正交体是四分体和八分体的泛化。在文献中也可以找到“超八分树”一词,用于命名4维及更高维度的此类数据结构。
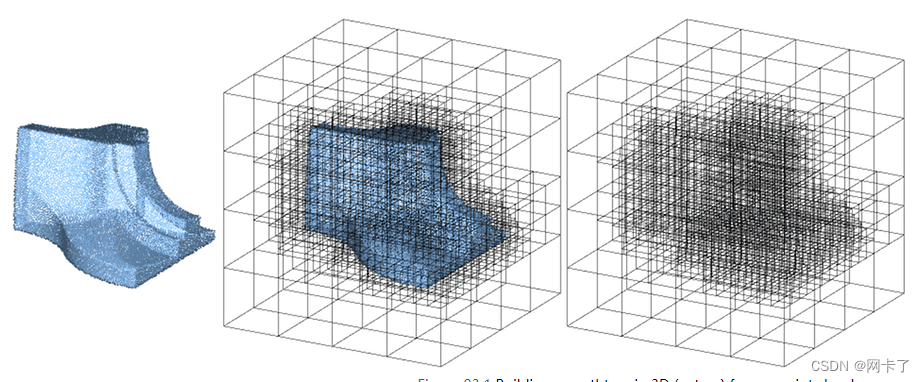
此软件包提供了一个通用的数据结构 Orthtree 以及 Quadtree 和 Octree 的别名。这些树可以用自定义点范围和分割谓词构造,并使用各种遍历方法迭代。下图是从点云构造八叉树。
2、构造
使用一组点创建正交树。这些点不会被复制:直接使用提供的点范围,并由正交树重新排列。在创建正交树后更改点范围可能会使其处于无效状态。构造函数返回一个包含所有点的单个(根)节点的树。
必须调用 refine() 方法来进一步细分空间。此方法使用一个 split 谓词,该谓词以节点为输入,如果该节点应该被分割,则返回 true,否则返回 false:这使得用户可以选择正交树应该细分的标准。提供了预定义的谓词,如 Maximum_depth 或 Maximum_number_of_inliers。
创建正交树最简单的方法是使用点向量。构造函数通常需要单独的点范围和映射,但如果未提供点映射,则默认使用Identity_property_map。
分裂谓词是一个用户定义的函子,用于确定节点是否需要分裂。如果现有谓词不符合用户需求,可以很容易地定义自定义谓词。
2.1、构建四叉树
Orthtree 类可以用 Orthtree_traits_2 进行模板化,从而表现为四叉树。为方便起见,提供了别名 Quadtree。
以下示例显示了如何从 Point_2 对象的向量创建四叉树对象并对其进行细化,这意味着使用最大深度 10 和每个节点的最大内含线数(桶大小)5 来构造树的空间细分本身。一旦违反其中一个条件,细化就会停止:如果节点的内含线数大于桶大小,但已经达到最大深度,则不会进行分割。同样,深度小于最大深度但内含线数小于桶大小的节点也不会进行分割。
Quadtree quadtree(points_2d);
quadtree.refine(10, 5);
2.2、构建八叉树
Orthtree 类可以用 Orthtree_traits_3 模板化,从而表现为八叉树。为方便起见,提供了别名 Octree。
以下示例显示了如何从 Point_3 对象的向量创建八叉树。
// Create an octree from the points
Octree octree(points);
// Build the octree
octree.refine(10, 20);3、遍历
为了简单起见,用户手册的其余部分将仅使用八叉树,但所有呈现的功能也适用于四叉树和更高维的正交树。遍历是在树的节点之间导航的行为。 Orthtree 和 Node 类为遍历树提供了许多不同的解决方案。
3.1、手动遍历
因为我们的正则树是一种连接的无环无向图,所以可以在任意两个节点之间导航。这在实践中意味着,给定树上的一个节点,可以使用正确的操作集访问任何其他节点。Node类提供了一些函数,使用户能够访问它的每个子节点以及它的父节点(如果存在的话)。
从根节点开始,可以使用下标运算CGAL::Orthtree::Node::operator[]()访问子节点。对于八叉树,0-7的值可以访问不同的子节点。
对于非根节点,可以使用 parent() 访问器访问父节点。
std::cout << "the root node: " << std::endl;
std::cout << octree.root() << std::endl;
std::cout << "the first child of the root node: " << std::endl;
std::cout << octree.root()[0] << std::endl;
std::cout << "the fifth child: " << std::endl;
std::cout << octree.root()[4] << std::endl;
std::cout << "the fifth child, accessed without the root keyword: " << std::endl;
std::cout << octree[4] << std::endl;
std::cout << "the second child of the fourth child: " << std::endl;
std::cout << octree.root()[4][1] << std::endl;
std::cout << "the second child of the fourth child, accessed without the root keyword: " << std::endl;
std::cout << octree[4][1] << std::endl;
std::cout << std::endl;3.2、前序遍历
能够以特定的顺序遍历树的节点通常很有用。例如,流运算符<<使用遍历来打印出每个节点。提供了几种遍历,其中包括Preorder_traversal和Postorder_traversal。以预序遍历树是立即访问每个父节点,然后访问其子节点,而在后序中,首先访问子节点。
Octree octree(points, points.point_map());
octree.refine();
for (Octree::Node node : octree.traverse<Preorder_traversal>()) {
std::cout << node << std::endl;
}3.3、自定义遍历
用户可以通过创建 OrthtreeTraversal 概念的模型来定义自己的遍历方法。
3.4、图解
显示了根据所使用的遍历方法访问节点的顺序。
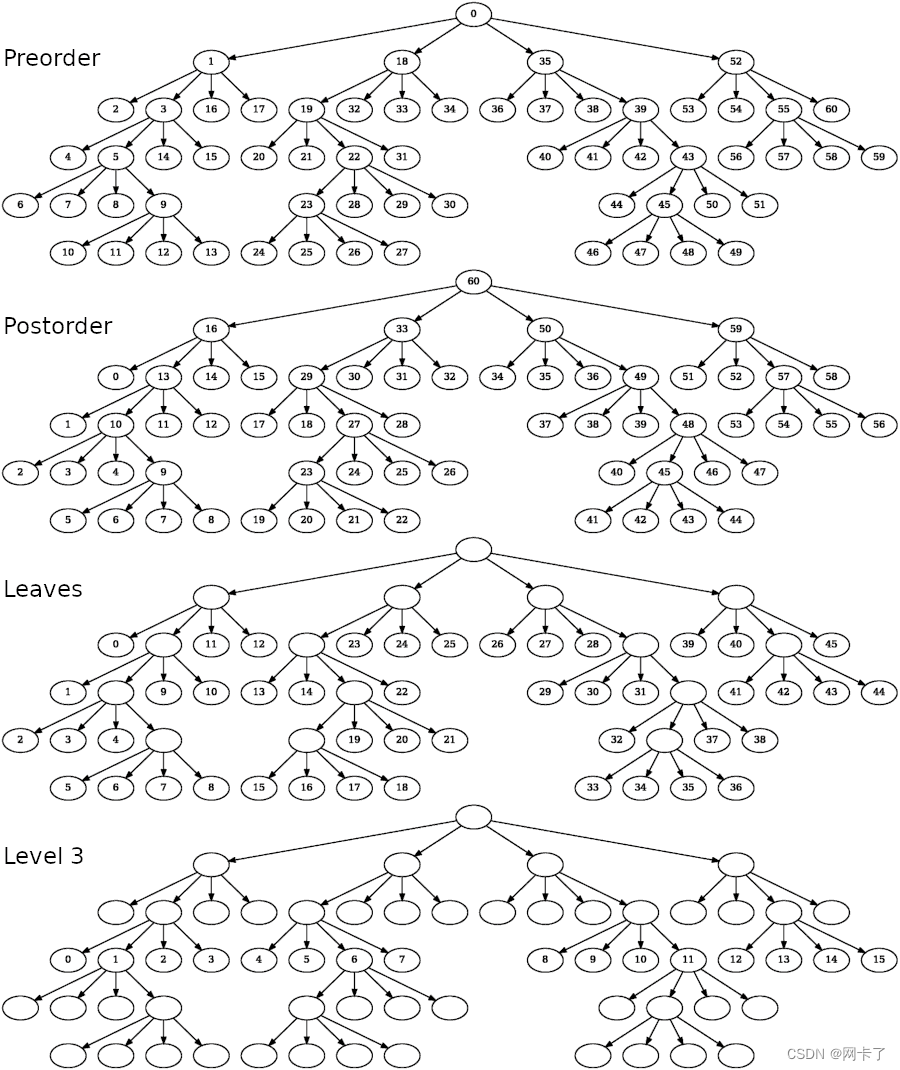
四叉树以图形形式显示。每个节点都根据遍历访问的顺序进行标记。使用叶子和级别遍历时,四叉树仅被部分遍历。
4、任务加速
一旦构建了正交树,它的结构就可以用来加速不同的任务。
4.1、寻找点的最近邻
找到一个点的最近邻的朴素方法需要找到到每个其他点的距离。正交树可以在更短的时间内完成相同的任务。对于大量的点,这可能是一个足够大的差异,超过了构建树所花费的时间。
请注意,kd-tree在这个任务上预计会优于orthtree,除非需要orthtree特有的功能,否则应该首选kd-tree。
4.2、分级
如果每对叶子之间相邻两片叶子之间的深度差最多为1,则正树是分级的。
使用 grade 方法消除 orthtree 中深度的大幅跳跃。
一棵树的创建方式是,一个节点的分裂次数比它相邻的节点多得多。 grade() 拆分八叉树的节点,使相邻节点的深度差不超过 1。在分级前后打印树,以便可以看到差异。
5、性能
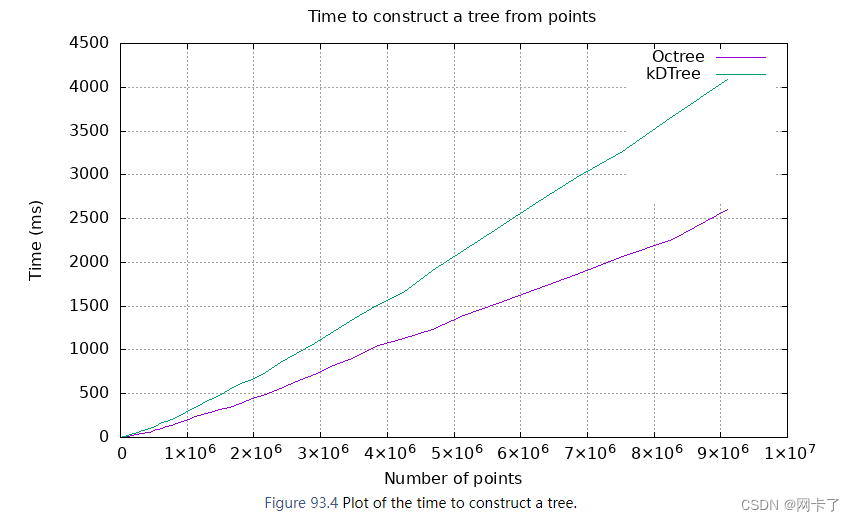
5.1、构建性能
树构建基准是通过随机生成一组点来完成的,然后对创建包含这些点的完全精炼树的过程进行计时。由于其简单性,八叉树可以比kd树更快地构建。
5.2、查找最近邻的性能
正交树节点是均匀的,因此正交树往往比等效的kd树具有更深的层次结构。因此,正交树在最近邻搜索方面的性能通常较差。两种最近邻算法的理论复杂度均为O(log(n)),但正交树通常可以预期具有更高的系数。

这两棵树之间的性能差异很大,但与涉及将每个点与搜索点进行比较的朴素方法的线性复杂度相比,这两种算法都非常有利。
使用正交树进行最近邻计算而不是kd树,可以在需要很少查询时(因为构造更快)或正交树也需要其他用途时进行证明。
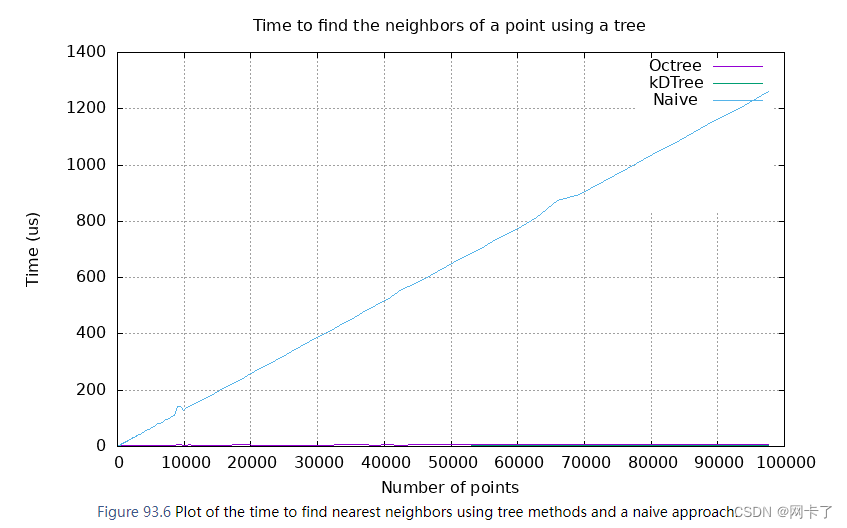
对于大数量级的点计数,朴素方法的计算时间远远超过正交树或kd树的计算时间。















 523
523

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









