







 本文探讨了人体关节角度的四种参数化表示——旋转矩阵、欧拉角、四元数和指数映射,并详细阐述了它们的性质及相互间的转换方法。旋转矩阵在表示关节角度时具有正交性质,欧拉角描述旋转序列,四元数用于避免奇点,指数映射提供了一种数值稳定的方式来表达旋转。
本文探讨了人体关节角度的四种参数化表示——旋转矩阵、欧拉角、四元数和指数映射,并详细阐述了它们的性质及相互间的转换方法。旋转矩阵在表示关节角度时具有正交性质,欧拉角描述旋转序列,四元数用于避免奇点,指数映射提供了一种数值稳定的方式来表达旋转。
人体关节角度的参数化表示
关节角度具有不同的参数化表示, 例如旋转矩阵、欧拉角、四元数和指数映射;
4种参数化的具体形式:
- 旋转矩阵(rotation matrices)
在利用旋转矩阵表示人体关节时,旋转矩阵是一个3*3的的正交矩阵,可以表示为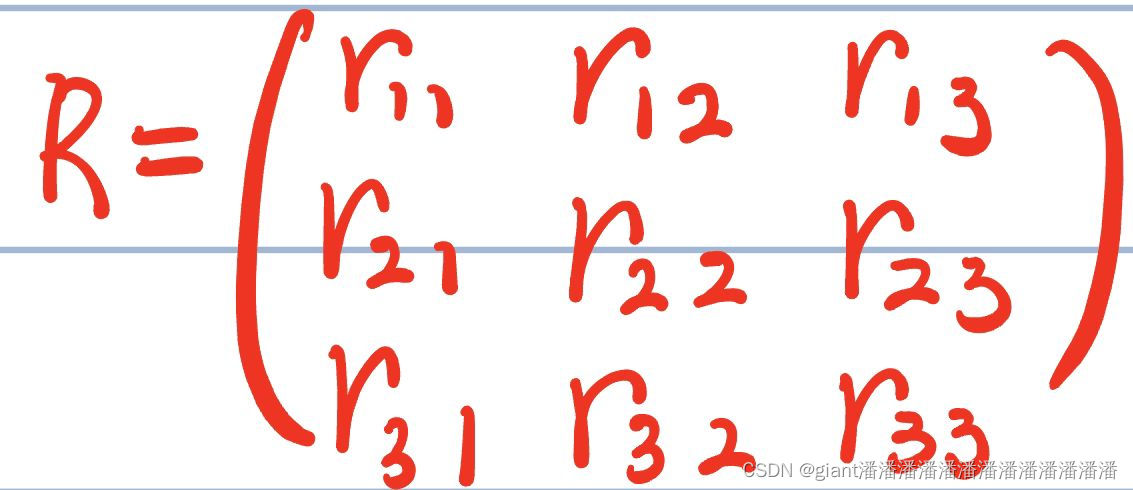
其中,矩阵共有9个元素,但只与3个独立元素有关。
旋转矩阵的性质:旋转矩阵R的逆是其转置。
若用矩阵的L1范数定义损失函数,可以增强对异常值的鲁棒性,并促进稀疏性。 - 欧拉角(Euler angles)
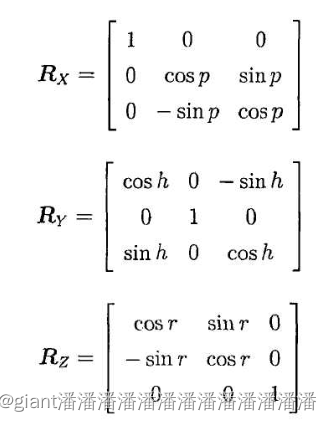
欧拉角描述了一个旋转序列,即按照顺序分别绕X轴、Y轴和Z轴旋转p、h和r这3个变量所表示的角度。分别绕X轴、Y轴和Z轴旋转p、h和r的旋转矩阵可以表示为:
- 四元数(quaternions):
一个四元数q包含一个标量分量和一个3D向量分量,通常标记分量为w,记向量的分量为v或者分开的x,y,z。
即[w,v]或者[w,x,y,z]
四元数也可以用成绕任意轴n旋转θ角的形式,但是n和θ并不是直接存储在四元数的四个数中,他与上述两个方式存在以下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9792
9792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









