








一、任务
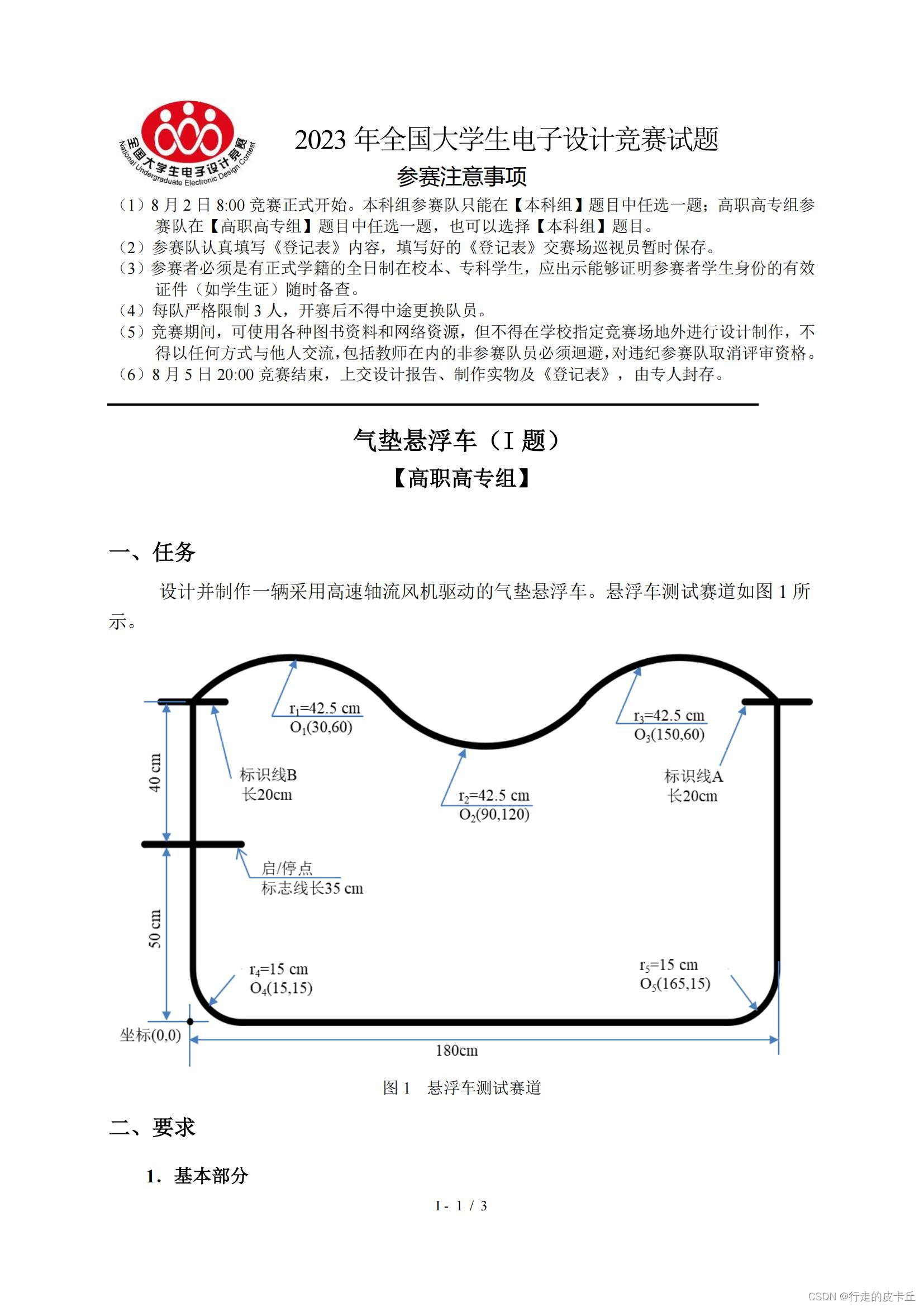
设计并制作一辆采用高速轴流风机驱动的气垫悬浮车。悬浮车测试赛道如图 1 所示。

二、要求
1.基本部分
- (1)在图 1 所示测试赛道上不摆放障碍物,将气垫悬浮车放在启/停点上一键启动后,气垫悬浮车能在启/停点缓慢升起,悬浮高度大于 2mm,悬停时间大于 2s。
- (2)气垫悬浮车由启/停点出发,沿测试赛道逆时针方向完成寻迹运行一周后,停在启/停点上。要求运行时间小于 180s,超时停止测试。
- (3)完成气垫悬浮车在标识线 A 与标识线 B 之间往返运行控制,气垫悬浮车由 A点沿测试赛道逆时针方向出发,到达 B 后返回到 A,再由 A 折返到 B,最终停在启/停点上。要求运行时间小于 120s,超时停止测试。
2.发挥部分
- (1)避障功能:将 2 个障碍物按要求摆放在测试赛道上 180cm 的直线段和标识线A、B 间弯道指定位置上。一键启动气垫悬浮车,气垫悬浮车能在启/停点缓慢升起并悬停,悬停时间不小于 10s,悬停结束后发出声光提示,然后按逆时针方向寻迹运行一周,在遇到障碍物时应绕过障碍物,发出声光提示,避障后返回到寻迹线上继续运行。运行一周后泊车在启/停点上,泊车后自动关机并进行定位检测。要求运行时间小于 180s,超时停止测试。
- (2)2 个障碍物放置同上,气垫悬浮车由 A 点沿寻迹线逆时针方向出发,到达 B 点后返回到 A 点,再由 A 点沿逆时针方向行驶经过 B 点,最终泊车在启/停点上,泊车后自动关机并进行定位检测。要求运行时间小于 120s,超时停止测试。
- (3)在运行中以语音方式实时播报运行信息。
- (4)其他。
三、说明
-
- 气垫悬浮车的悬浮与前进或倒退所需动力均由高速轴流风机来产生,所用高速轴流风机的数量和型号不作限制。对气垫悬浮车外形尺寸要求为:长度<35cm、宽度<25cm,高度<20cm。不允许在车体上安装任何类型车轮,外形尺寸超标和安装有车轮均不予测试。
-
- 在气垫悬浮车身上应标有明显的中心定位十字标识,便于进行停车定位测量。
-
- 气垫悬浮车采用电池供电,在基本要求和发挥部分测试间隙允许更换一次电池,更换时间不大于 120s。
-
- 黑色寻迹线宽度为 1.8cm,测试时测试赛道自带(不用封在作品箱中)。
-
- 障碍物采用直径约 6cm,容积为 350ml 左右并装满水的矿泉水瓶,测试时自带。
-
- 气垫悬浮车避障时只能从障碍物的左或右侧绕行通过,通过障碍后悬浮车应在距离障碍物 40cm 区间内返回到寻迹线上,气垫悬浮车如果触碰到障碍物或推动障碍物运行、没有在规定区间内返回到寻迹线上均扣分。
-
- 停车定位检测要求:以场地上启/停点的十字线中心为基准,与车身上的十字中心点距离不大于 10cm,超过距离扣分。
-
- 要求气垫悬浮车能用语音模块来播报运行信息,运行信息包括:悬停时间、循环运行、躲避障碍数量、稳定停车等内容。
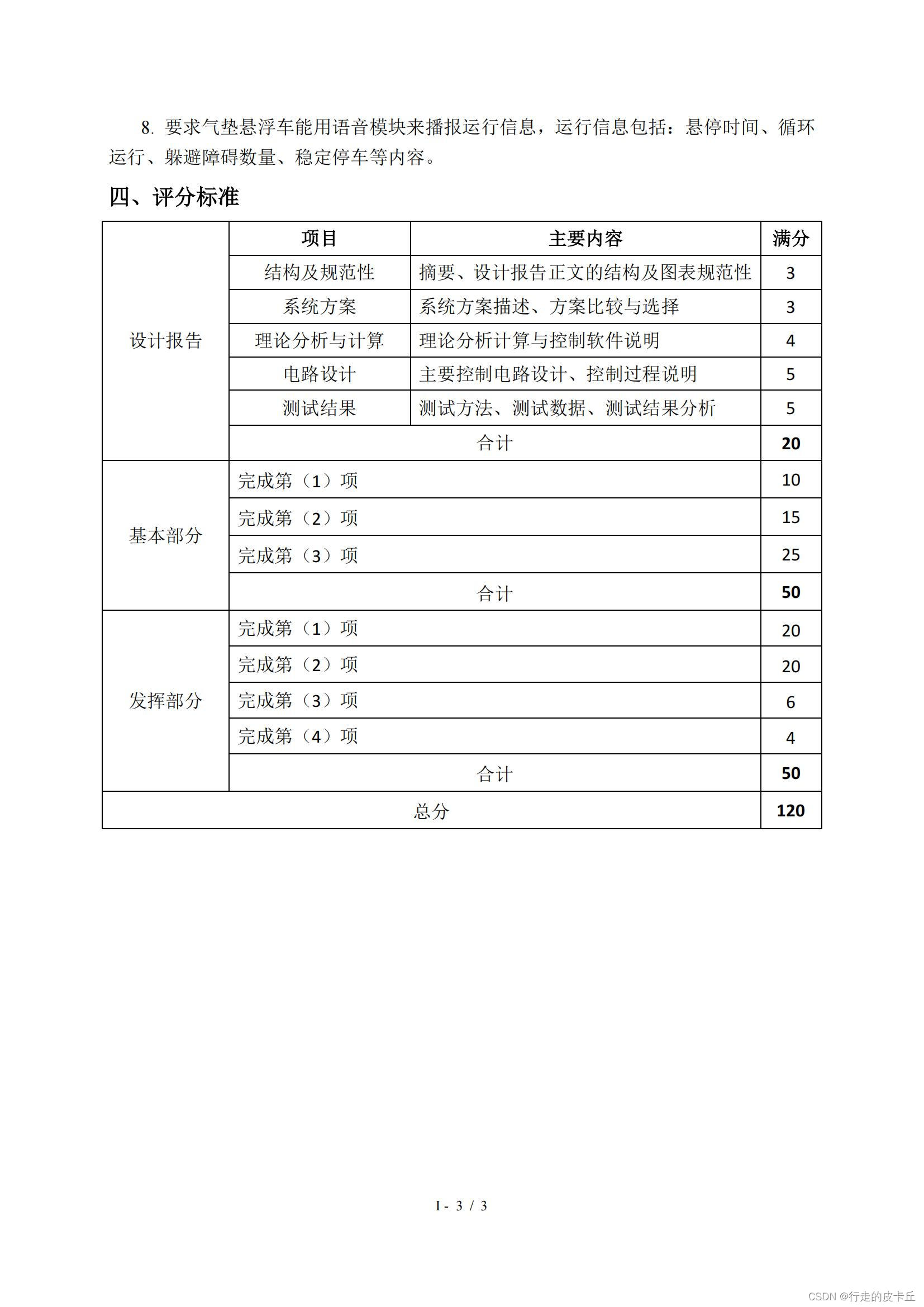
四、评分标准

优秀作品开源参考(来源立创开源平台)



















 1672
1672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











