







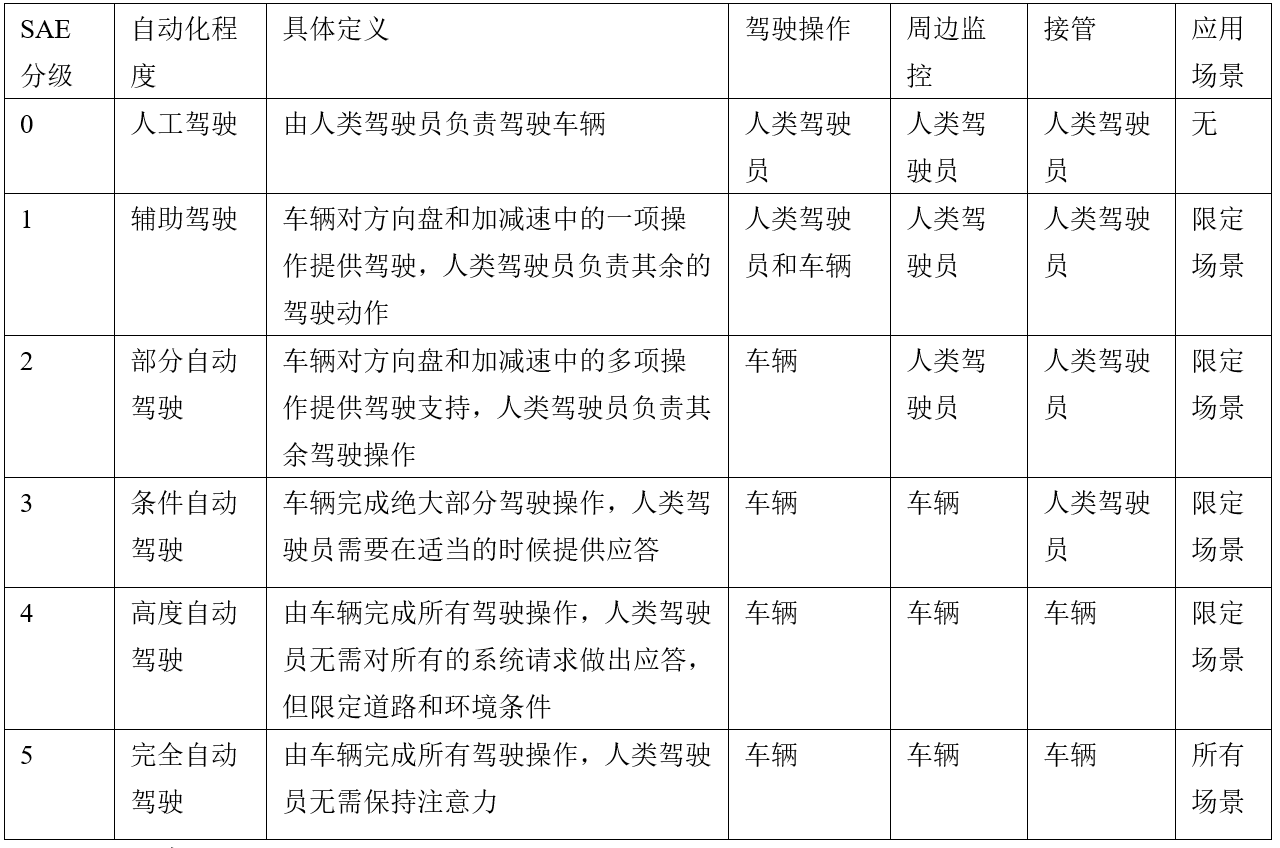
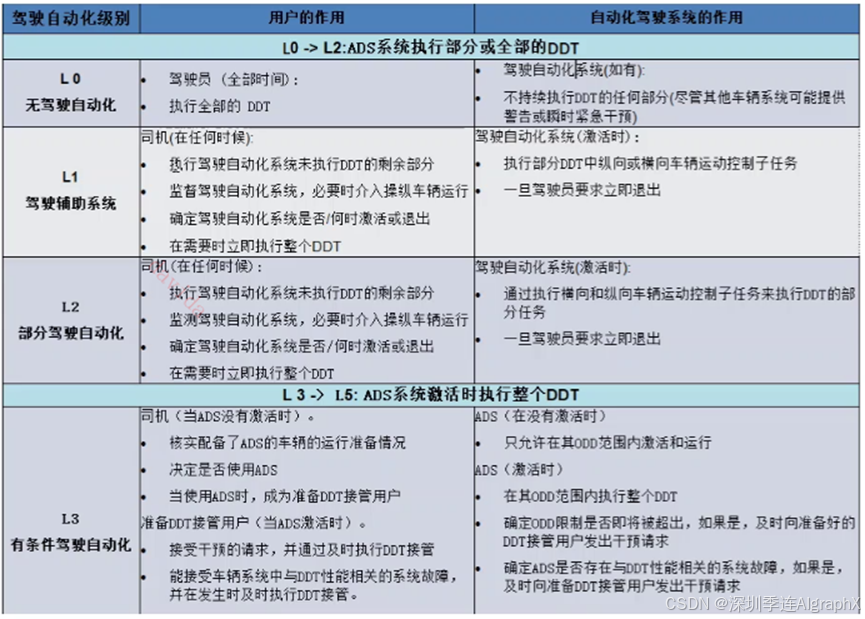
根据SAE J3016、ISO 22737法律法规规范,智能驾驶系统分级如下:

关键词
ADS 自动驾驶系统
Feature 功能
子行程功能
全行程功能
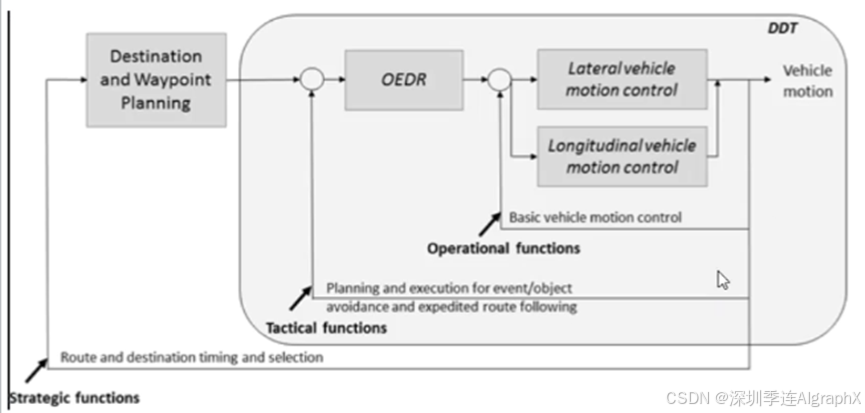
DDT 动态驾驶任务
1、通过转向进行车辆横向运动控制 (运行);
2、通过加速和减速的纵向车辆运动控制 (运行);
3、通过物体和事件检测、识别、分类和响应准备来监测驾驶环境(运行和策略性);
4、物体和事件响应的执行(运行和策略性);
5、操纵计划 (策略);
6、通过照明、鸣笛、信号、于势等方式加强显眼性。
ODD设计运行域
操作设计领域Operational Design Domain,指自动驾驶系统被设定为功能运行的具体条件,每家企业设计不一样,每种场景也不一样。这些条件十分广泛,譬如以下几个方面:
- 在道路条件上,这涵盖了诸如高速公路、普通街道、未铺装道路,甚至是智慧港口专为自动驾驶车辆设计的车道。同时,还需考虑到道路的具体特征,如坡度、倾斜度、弯道的曲率,以及是否存在施工区域等;
- 地理条件方面,则包括了城市环境、山区、沿海或内陆地区、山地或平原等多种地形。此外,还有所谓的“地理围栏”,这是一个预定义的区域,自动驾驶车辆仅在此范围内行驶,通常这样的环境都是已经过验证,适宜自动驾驶车辆运行;
- 环境条件也是一个重要的考量因素,它涉及天气状况、光照条件、昼夜交替、风力、降水(如雨、雪)、雷电和雾等。例如,在重雨或降雪的情况下,车载传感器可能会受到影响而失效。同时,周边的车流、行人、动物以及建筑物等也都被纳入考虑范围;
- 还有一些其他条件需要考虑,如速度限制、交通信号灯等交通设施的存在与否、是否有安全员随行,以及连续行驶的时间等。同时,还需要遵守相关的规定。
另外随着端到端多模态大模型在智驾上的尝试,ODD定义场景的内涵和外延都在发生变化。
根据国内新势力发表的DirveVLM论文来看,定义了可以落地的40多类场景以及随后的元操作指令。
根据Waymo最近发表的EMMA端到端多模态大模型https://arxiv.org/abs/2410.23262内容来看,Waymo从4个层次构建了驾驶原理:
- R1感知场景并描述:广泛描述驾驶场景,包括天气和路况;
- R2感知关键对象:识别可能影响开车的交通参与者,并以坐标来表示。示例:行人[9.01,3.22];
- R3描述关键对象的行为:描述已识别到对象的状态和意图。示例:[9.01,3.22]的行人站在人行道上,看着斑马线,可能是要过马路;
- R4元驾驶决策:包括12类高级驾驶决策,根据此前感知内容和描述,总结驾驶决策。示例:[9.01,3.22]的行人可能是要过马路,所以此时“我”应该减速让行。
这种从可解释性出发,感觉正在往通用智能方向发展,ODD定义的内容会变得越来越完善。
OEDR 目标与事件探测和响应
探测: 对目标和事件的探测、识别和分类;
响应: 对目标和事件探测结果的响应降级,
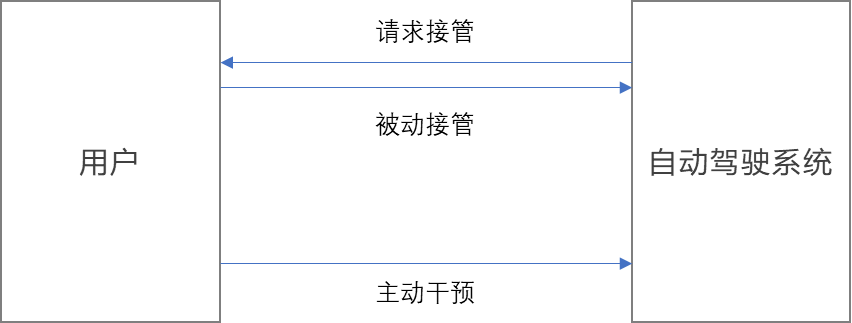
接管/接管请求
L3、L4的自动驾驶系统才会有接管一说,目前按照严重性一般有三级分类方式:
一级接管:
1、在系统ODD之内,即将发生碰撞等安全风险时,人类进行的被迫接管;
2、在系统ODD之内,系统应对问题的能力不足时,人类进行的被迫接管。
二级接管:
1、超出系统ODD范围之外,系统遇到未知的危险,人类进行安全接管;
2、除被迫接管外,系统软硬件发生故障时,导致系统无法正常运行,人类进行安全接管。
三级接管:
1、由于设计不足,自动驾驶系统不符合法规/道德/情理等标准要求,驾驶员进行干预接管;
2、系统表现不及人类驾驶员意图预期,性能表现不好时,人类进行干预接管;
3、系统降级和退出接管机制出发,由系统提醒后,人类进行干预接管;
4、其它。如:误触发接管、人类干预接管。
智能驾驶接管请求通常发生在以下几种情况:
- 系统能力限制:当智能驾驶系统遇到超出其设计运行范围的情况时,如复杂的交通环境、极端天气条件等,系统会请求驾驶员接管以保障安全;
- 系统故障:如果智能驾驶系统出现故障或失效,系统会发出接管请求,要求驾驶员接管车辆控制,以确保车辆安全;
- 动态驾驶任务接管:在动态驾驶任务(DDT)执行过程中,如果系统检测到潜在风险或需要驾驶员做出决策时,会发出接管请求。
智能驾驶接管请求的触发机制主要包括以下几种:
- 传感器数据异常:当智能驾驶系统的传感器(如摄像头、雷达等)检测到异常情况时,系统会发出接管请求;
- 算法判断风险:智能驾驶系统的算法在处理传感器数据时,如果判断当前情况存在风险,会发出接管请求;
- 系统状态监测:系统会实时监测自身的运行状态和外部环境条件,当检测到超出设计运行范围的情况时,会发出接管请求。
当智能驾驶系统发出接管请求时,驾驶员应采取以下应对措施:
- 及时接管:驾驶员应立即接管车辆控制权,确保车辆安全;
- 检查系统状态:检查智能驾驶系统的传感器和算法是否正常工作,确保系统无故障;
- 反馈信息:如果频繁出现接管请求,驾驶员应向车辆制造商反馈,以便进行系统升级或维修。
通过以上措施,可以确保在智能驾驶系统发出接管请求时,驾驶员能够及时、有效地接管车辆控制权,保障行车安全。
准备接管用户
车辆坐标轴
最小风险条件
根据ISO 26262、21448、21434三大安全体系要求,安全任务重,路阻且长。
智能驾驶最小风险条件(MRC)是指在智能驾驶系统中,通过一系列技术和策略来确保车辆在各种驾驶场景下的安全性和稳定性,从而最大限度地减少事故风险。MRC的实现涉及多个方面,包括失效可运行架构、智能失效运行回退策略等。
行程
分级定义
1-5级
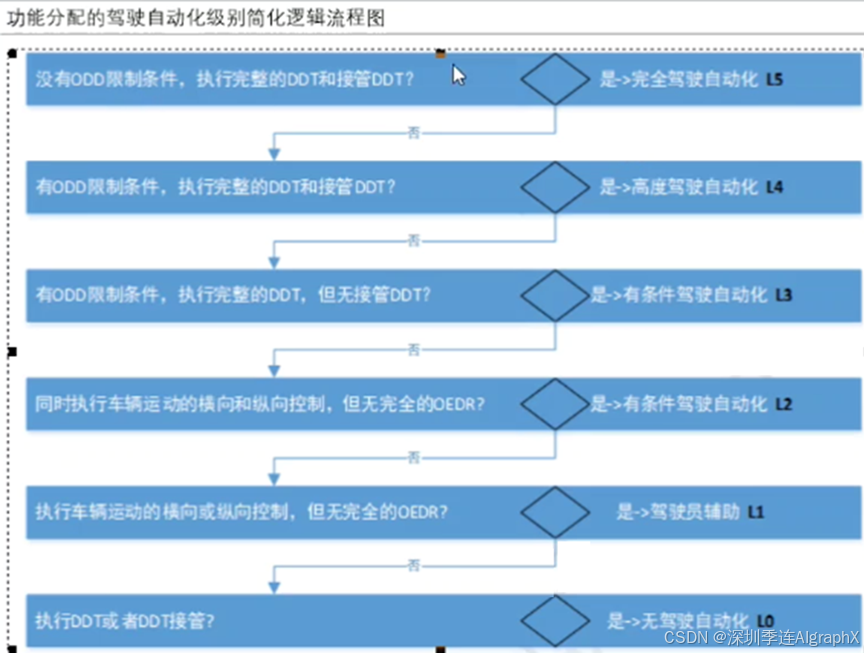
L1级
执行DDT为横向或纵向持续的车辆控制,司机不参与控制,需要观测道路及车辆状态随时接管。
AEB,LKA可以划分为L1级,ACC和LKC属于L1级。
L2级
执行DDT横向和纵向持续的车辆控制,司机不参与控制,需要观测道路及车辆状态随时按管。
HWA,NOA
L3级
执行DPT横向和纵向持续的车辆控制,司机不参与控制,在ODD范围内运行,不需要观察道路和车辆状态。OEDR,需要准备接管车辆。
TJC,HWP
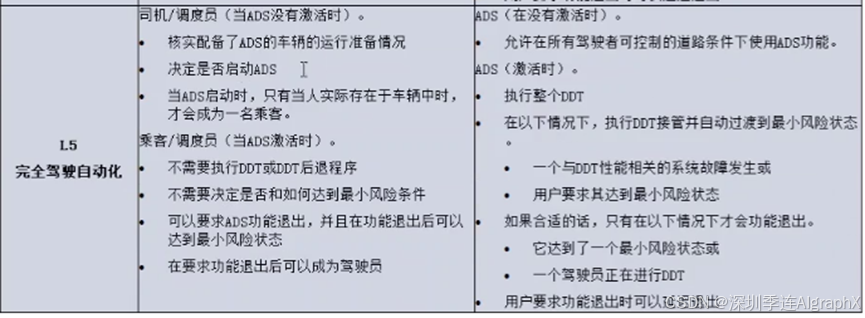
L4级
执行DDT横向和纵向持续的车辆控制,司机不参与控制,在ODD范围内运行,无需接管车辆。
L5级
执行DDT横向和纵向持续的车辆控制,无需接管车辆。
分类标准
2021年4月30日,SAE发布了第四版J3016《驾驶自动化分级》,这是即2014年1月16日、2016年9月30日、2018年6月15日之后,J3016的又一次迭代更新。
2021年7月,ISO发布了ISO 22737《预定路线的低速自动驾驶(LSAD)性能要求、系统要求和性能测试规范》。
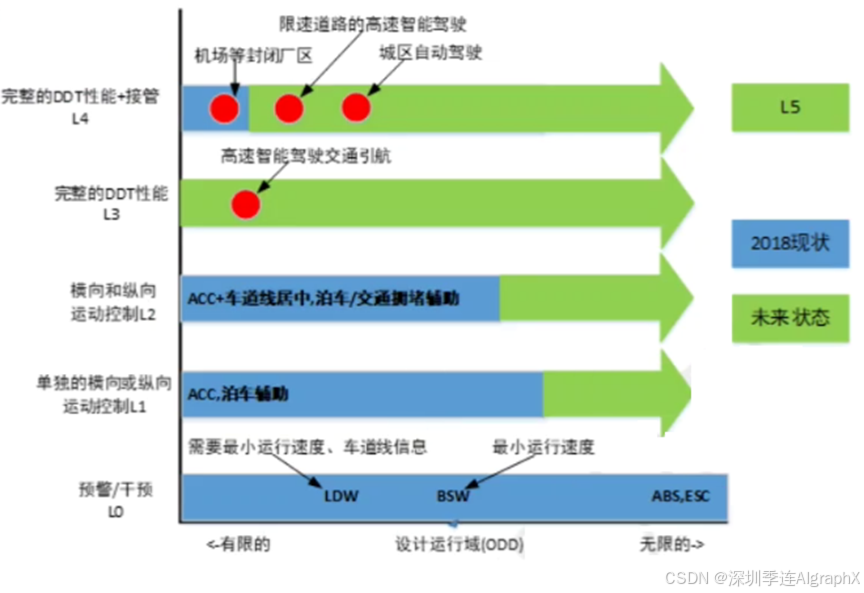
分级逻辑图
用户角色
ODD设计运行域
细化6大设计运行域。


















 2955
2955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











