







 本文详细介绍了ACC自适应巡航控制系统的整车测试与验证过程,涵盖控制器BSW测试、系统集成测试、逻辑测试、功能实车测试等多个方面,强调了人机交互、法规场景、性能测试等方面的重要测试内容,旨在确保ACC系统的安全性和可靠性。
本文详细介绍了ACC自适应巡航控制系统的整车测试与验证过程,涵盖控制器BSW测试、系统集成测试、逻辑测试、功能实车测试等多个方面,强调了人机交互、法规场景、性能测试等方面的重要测试内容,旨在确保ACC系统的安全性和可靠性。
本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
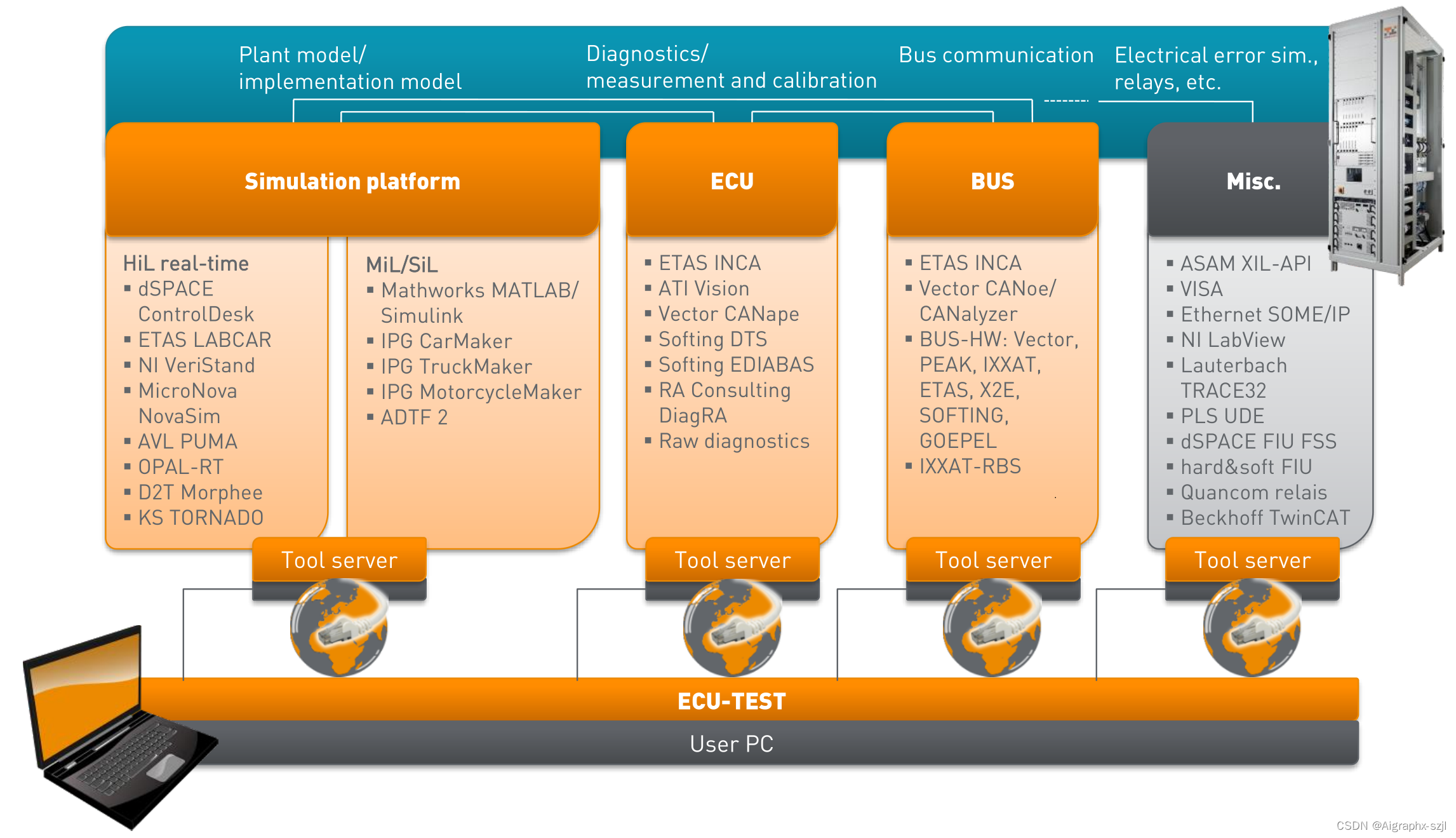
本节主要讲ACC系统整车测试与验证,其中工具链示例如下图:
1. ACC系统整车测试
ACC整车系统测试主要交付物:测试用例和测试报告。测试用例与需求分析需要对应。
系统测试计划
系统测试规范
测试方案
测试流程
测试用例
系统测试报告
需求跟踪文档
与需求分析对应
2. ACC功能系统测试
2.1 控制器BSW测试
通信
诊断
刷写/OTA
网络安全
台架/产线、服务标定等
2.2 系统集成测试
诊断— DTC故障显示测试
状态机测试
状态显示
抑制条件测试
故障相关测试
感知
控制器故障
执行器故障
动力系统
制动系统
2.3 逻辑测试
状态机跳转测试
故障注入测试
3. ACC功能实车测试
3.1 人机交互
3.1.1 驾驶员输入
开关
激活
取消
速度调整
跟车时距调整
功能切换,和其他辅助驾驶功能切换
车门
安全带
挡位
ESC开关
EPB
发动起启停
3.1.2 HMI输出
ACC图像显示
状态显示
车道和车道线
EGO
前方车辆
车速
目标车速
跟车时距
接管提醒
相关文字显示
功能无法激活
功能退出
功能接管
前车驶离
声音
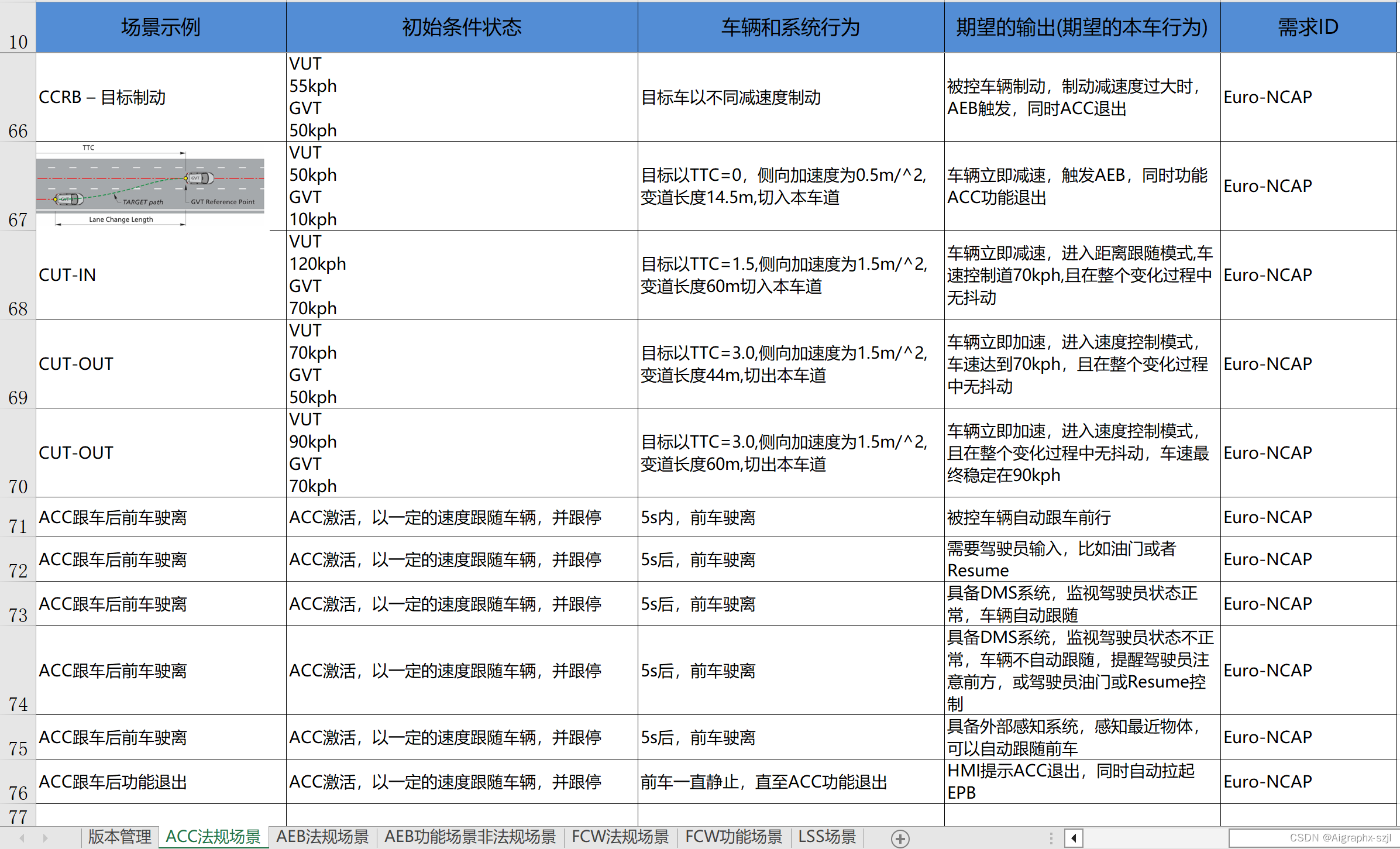
3.2 法规场景
ISO-15622
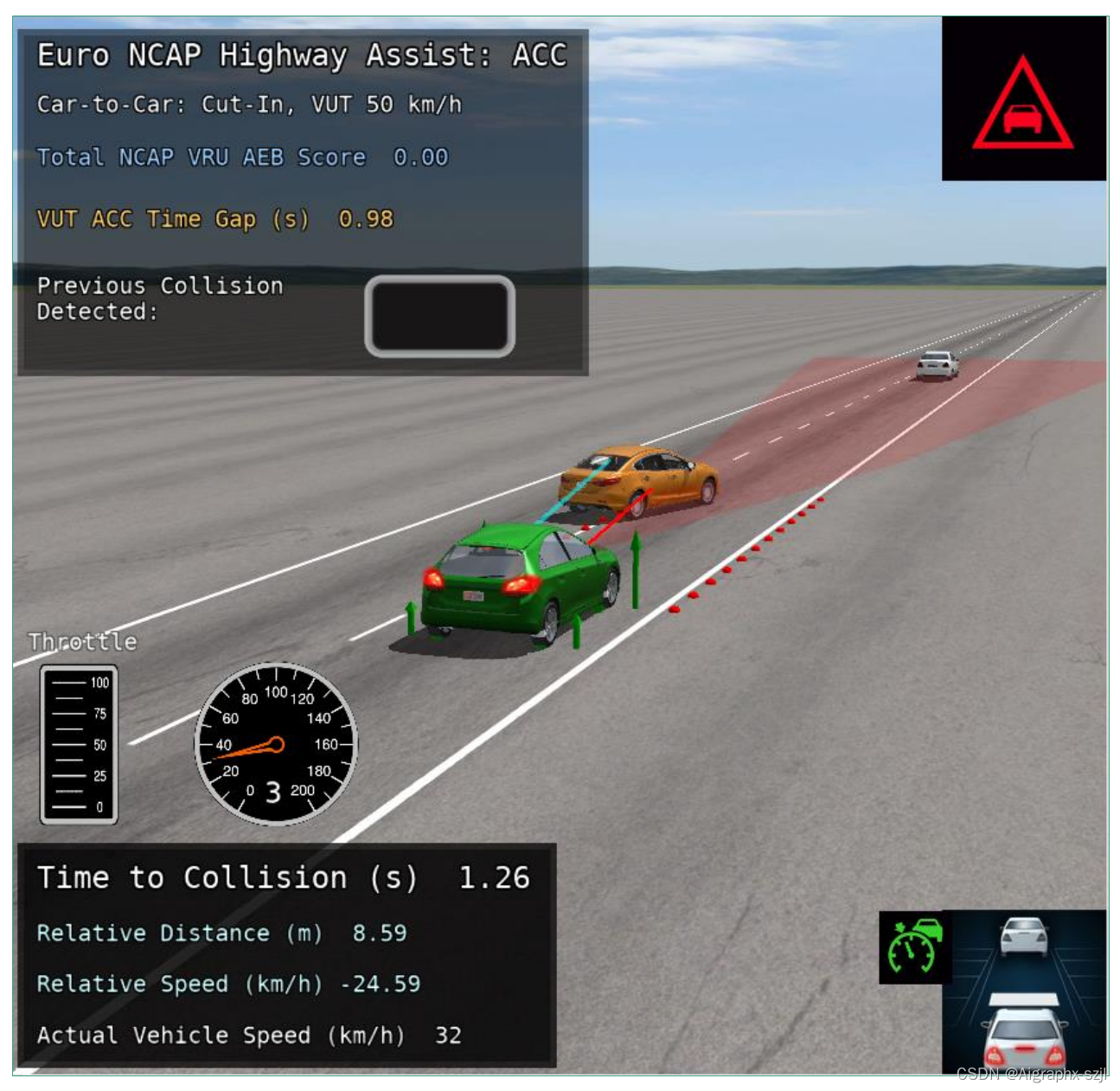
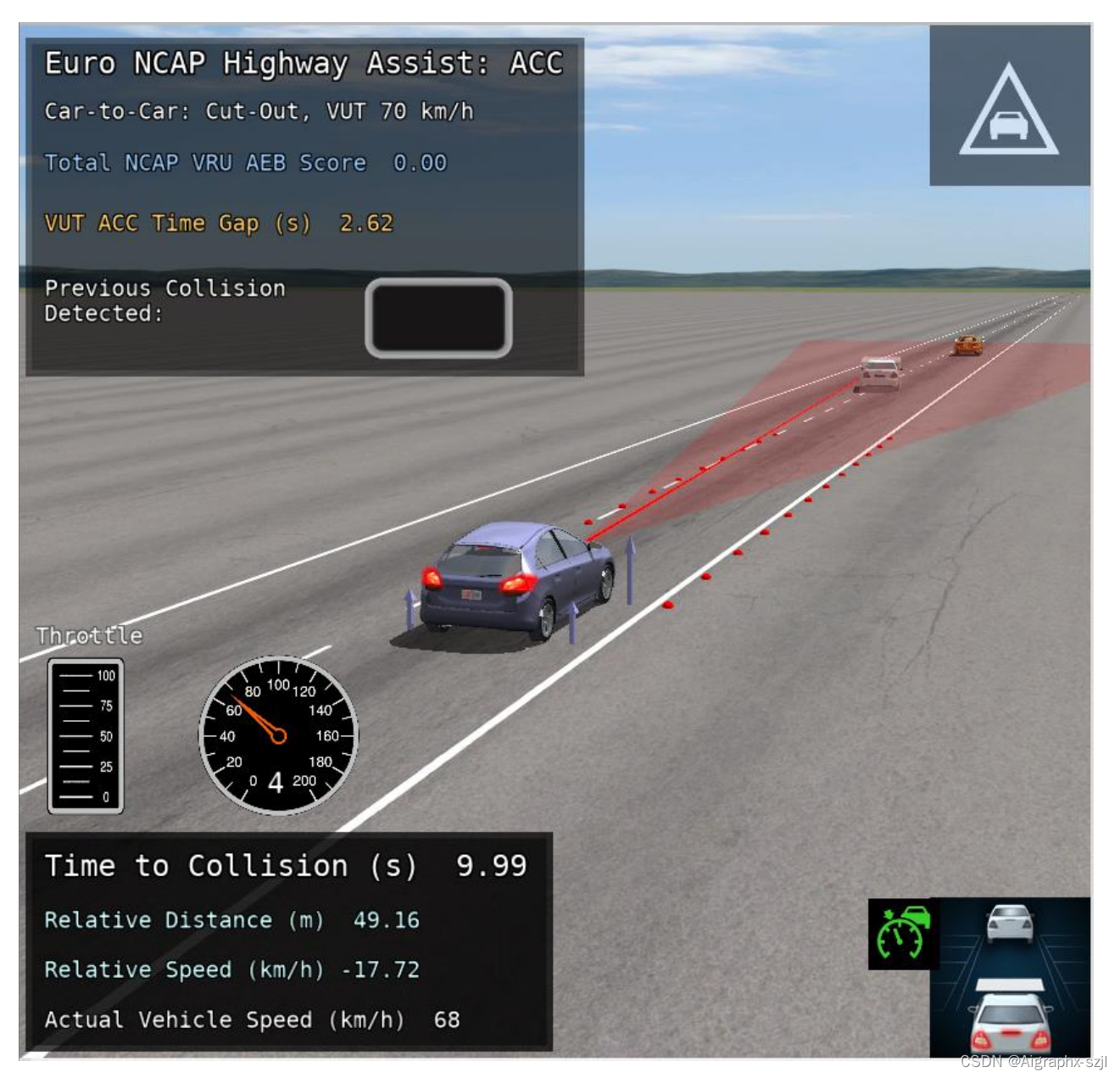
Euro-NCAP
GB/T 20608
……
3.3 功能测试
功能打开
功能激活测试
非静止激活
静止激活
前面无目标激活
前面有目标激活
功能退出测试
驾驶员override测试
定速巡航测试
跟车巡航测试
定速巡航和跟车巡航切换测试
接管测试
系统故障测试
3.4 性能测试
主要遵循ISO15622、GB/T20608两标准。
3.4.1 定速巡航性能
平路定速巡航测试
加速性能测试
100公里加速
50公里加速
80-100公里加速
减速性能测试
上坡定速巡航测试
上坡加速巡航测试
上坡减速巡航测试
下坡定速巡航测试
下坡加速巡航测试
下坡减速巡航测试
激活后换档点位巡航测试
换挡点位点激活测试
驾驶员Override测试
加速过程中激活
减速过程中激活
3.4.2 跟车巡航性能
远距离目标接近
常速跟车测试
低速跟车测试
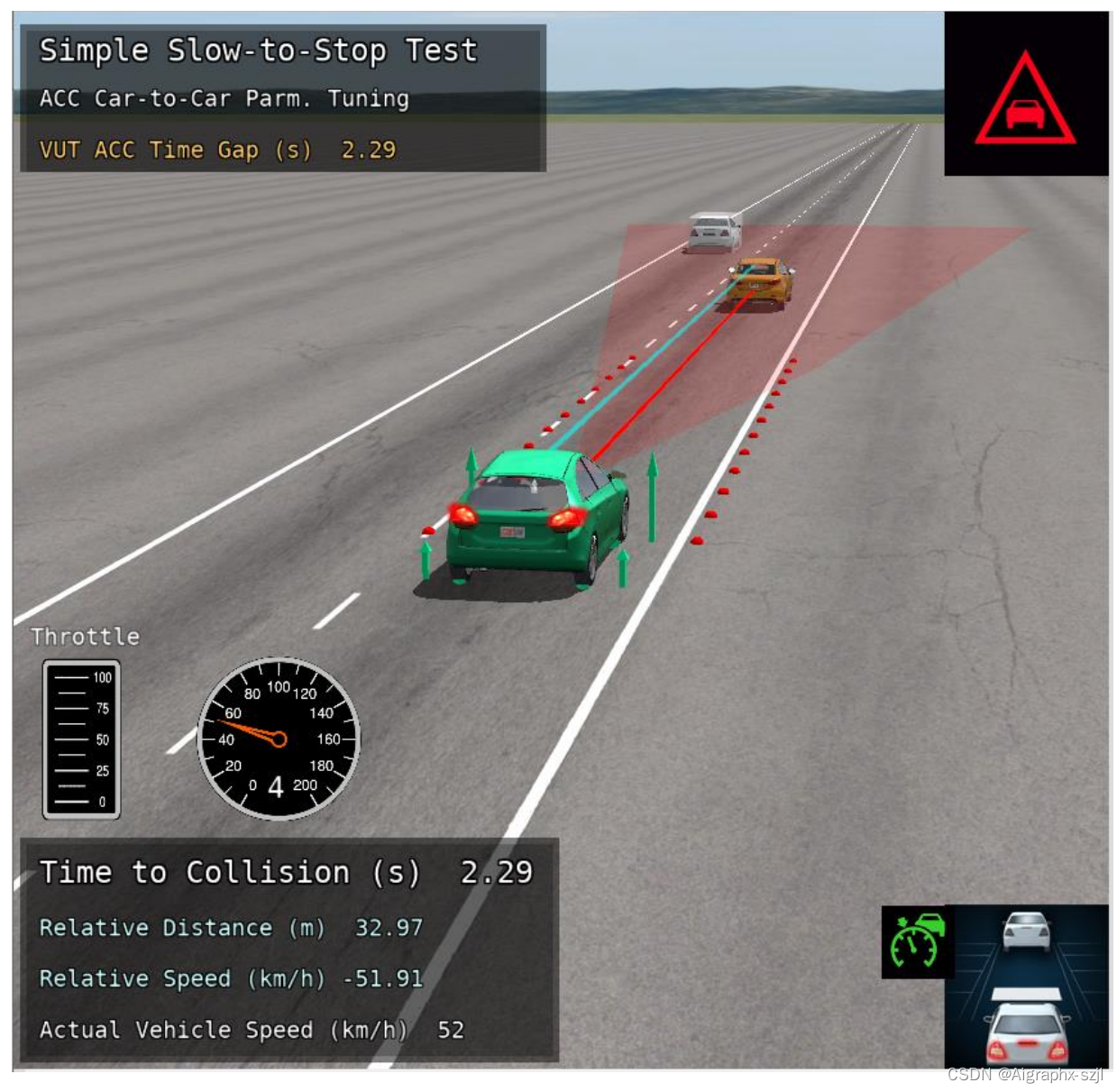
跟停/起步测试
整车道路跟/停起步测试
能否刹住车
与AEB功能混合测试
抖动
乘客是否前倾
前车启动3s后,是否跟车
弯道情况下,启动加速度是否过大
红绿灯路口
坡道跟停/起步测试
坡道太大,功能是否抑制
上下坡是否溜
前车加速
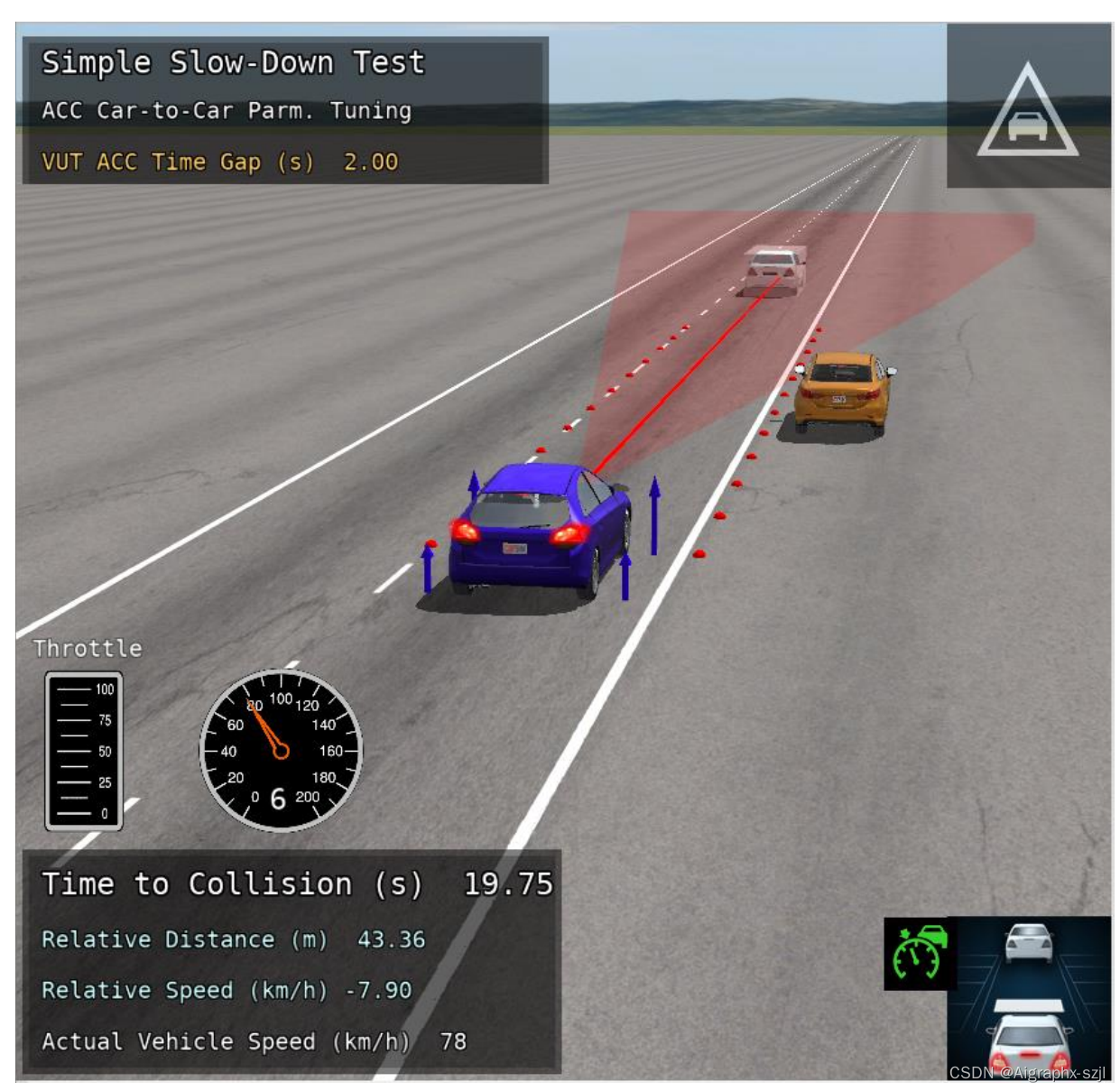
前车减速
前车先减速后加速
不同TimeGap跟车测试
目标远距离切入
目标正常距离切入
目标近距离切入
月标正常距离切出
目标近距离切出
目标切出后,前面有目标
前方减速过程中激活
跟车Override
跟车Override 松油门
弯道巡航测试
不同弯道速度适应性控制
跟车巡航测试
3.4.3 目标选择性能
前方目标静止
目标远距离切入
目标正常距离切入
目标近距离切入
目标正常距离切出
目标近距离切出
目标切出后,前面有目标
自车切入
自车切出
弯道行驶
前方有目标
相邻车道有目标
不同车辆类型切入切出
3.4.4 环境适应性
这里多解释一下,增加了一些非测试报告里面的书面文字。
3.4.4.1 道路环境
ACC功能测试的道路类型可能包括但不限于以下几种:
普通道路:这是最常见的测试环境,包括城市道路、乡村道路、高速公路等。在这些道路上,车辆需要遵循交通规则和限速,同时也要注意行人和其他道路使用者。
湿滑道路:在雨天或雾气等湿滑道路上,车辆的制动距离和加速性能会受到影响,因此需要特别注意测试车辆的ACC功能是否能够正常工作。
雪地和冰面:在雪地和冰面上行驶时,车辆的附着力会降低,制动距离会增加,因此需要特别注意车辆的ACC功能在这些道路上的表现。
砂石道路:砂石道路的附着力较低,容易导致车辆打滑和失控,因此需要在这种道路上测试车辆的ACC功能是否能够正常工作。
城市拥堵道路:城市拥堵道路的特点是车流量大、车速较慢,在这种道路上需要测试车辆的ACC功能是否能够适应这种交通环境。
在爬坡时,车辆需要足够的动力来推动车身前进,同时制动性能也需要得到保证,以防止车辆在坡道上失控。因此,需要在爬坡道路上测试车辆的ACC功能是否能够根据车速和距离自动调整车速,以及是否能够正常工作。
在下坡时,车辆的加速度会受到一定的影响,制动性能也需要得到保证,以防止车辆在下坡道上失控。因此,需要在下坡道路上测试车辆的ACC功能是否能够根据车速和距离自动调整车速,以及是否能够正常工作。
除此之外,还需要注意测试车辆的悬挂和制动系统在这种道路上的表现,以确保车辆在上下坡道路上能够安全行驶。
在各种弯道上测试ACC行驶时,需要特别注意以下几点:
减速并选择合适的路线。在进入弯道前应该减速,让车辆靠着弯道外侧进入弯道,并选择合适的路线和修正方向。
注意车速和挡位。如果弯道较陡峭,应该将挡位降低一挡或二挡,同时轻点油门,过了弯道弧顶之后,再切回弯道的外侧,并加大油门,最后靠着弯道的外侧快速驶出弯道。
注意盲区弯道。在盲区弯道上行驶时,看不到弯道尽头的交通情况,应该降低车速,选择合适的时机和车速,同时要注意方向盘转速与车速的配合。
在各种弯道上行驶时还需要注意车速和弯道曲率半径的关系,以及方向盘转速与车速的配合,避免急刹车和换挡等情况的发生。同时要根据路面宽窄、交通情况等因素综合考虑测试车辆的操控性能和悬挂系统在这种道路上的表现,以确保车辆能够安全行驶。
需要注意的是,不同的道路类型对于ACC功能测试的结果会产生不同的影响,因此在测试时需要充分考虑各种道路类型的特点,以确保测试结果的准确性和可靠性。
本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
3.4.4.2 天气环境
在各种天气环境下,温度、雨量传感器和路面附着系数对于测试车辆的ACC(自适应巡航控制)功能有重要作用。
1. 温度传感器:在自适应巡航控制系统中,温度传感器可以通过测量环境温度,为车辆提供必要的数据。例如,在某些情况下,车辆的制动距离和加速性能可能会受到环境温度的影响。此外,温度传感器也可以帮助车辆避免在极端温度下运行,以保护车辆的发动机和其他组件。
2. 雨量传感器:雨量传感器是一种用于测量下雨量的仪器,通常用于气象观测和防洪等领域。在测试车辆的ACC功能时,雨量传感器可以测量雨水并转换为电信号输出。这些数据可以用于判断道路的湿滑程度,从而调节制动力度,避免车轮锁死。此外,一些高端车辆还配备了牵引力控制系统(TCS)和动态稳定控制系统(DSC),它们可以通过感知车辆的加速度、转向角度和侧滑情况来调节发动机输出功率和车轮制动力,以保持车辆的稳定性。
3. 路面附着系数:路面附着系数是反映路面与轮胎之间的摩擦力系数的量。对于驾驶员来说,了解路面附着系数的大小是非常重要的。一般来说,道路上的积水、积雪和冰面都会导致路面湿滑,使附着系数下降。附着系数的下降会导致车辆的制动距离增加,加速性能下降,甚至在急转弯时容易失控。对于交通管理部门来说,路面附着系数的掌握也是非常重要的。他们需要监测和维护道路的路面质量,及时清理积水、积雪和冰面,保持路面的良好状态。此外,他们还需要根据不同的天气条件,采取相应的交通管理措施,如限速、交通警示等,以提醒驾驶员注意路面的湿滑情况。
在各种天气环境下,温度、雨量传感器和路面附着系数对于测试车辆的ACC功能以及行车安全和交通管理都起着重要的作用。
4. ACC测试报告
测试设计
测试依据:E-CNAP、ISO15622、i-VISTA自适应巡航控制系统评价规程、GB/T 20608等等。
测试方法
测试环境
测试用例
测试流程
测试结果
ACC状态机测试
加减速测试
跟车时距测试
目标选择测试
5. ACC典型测试
5.1 典型用例
5.1.1 单独功能测试
| 使用案例描述 | |
|
| 定速控制 车辆根据驾驶员设定的巡航速度行驶。驾驶员可设置的巡航速度范围为30-150km/h。 |
|
| 跟随控制 启停型ACC(ACC Stop & Go)使自车跟随前车行驶到停并满足以下需求: 自车跟随前车停止后3s内若前车驶离,ACC自动进入激活-Active control状态并自动跟随前车起步; 自车跟随前车停止3s后,驾驶员需要通过按RES/+键或踩下油门才能激活ACC; 在自车车速0~150km/h时,若自车前方无车辆或前方车辆静止/趋停/运动,ACC功能均能激活,其中“车速为0”是指车辆静止状态且(驾驶员踩住刹车或AVH开启)。 在车辆跟随前车刹停过程中时,因近距离目标丢失导致ACC功能退出时提示驾驶员请接管后功能退出。 |
|
| 弯道控制 弯道控制功能应当使车辆在弯道巡航时避免出现不舒适的加减速。 弯道控制根据弯道的半径,在巡航时通过控制车速,使车辆的侧向加速度小于限定的阈值。 弯道内的横向加速度满足以下要求: 弯道控制根据弯道的半径,设定最大巡航车速,当实际车速超过设定值时,将减速至设定值。 |
|
| 减速控制 ACC根据不同工况计算并输出目标减速度,输出至ESC车辆纵向控(VLC)模块实现自车减速控制。VLC接收ACC目标减速度,通过以下2种方式控制自车减速: 通过减小发动机的扭矩进行部分控制(无制动干预) 通过ESC减速单元进行完全控制(有制动干预) |
|
| 加速控制 ACC应根据不同工况计算并输出目标加速度,输出至车辆纵向控制(VLC)模块实现车辆的加速控制。车辆纵向控制(VLC)模块接收到目标加速度指令后计算输出扭矩,控制发动机管理系统(EMS)实现车辆加速。ACC加速度限值用于限制ACC目标加速度的最大值(如前方无目标车时设置较高的vSet),ACC加速度限值由以下两组数据组成,根据本车车速选择两者的较小值: 车辆的实际加速能力:实车0-150km/h全油门的最大加速度限制; 软件参数限值:在不同模式下(Economy、Normal、Sport)由一组软件参数限制。 |
|
| 切入/切出控制 切入\切出控制功能在变道过程中,ACC释放前方目标、拾取所切入/切出车道车辆为新目标,从而继续保持控制。 |
|
| 超车辅助 超车辅助功能根据左转向灯信号辅助驾驶员从左侧进行超车,该功能分以下几个步骤: 1. 在原车道上缩短与前车的距离; 2. 快速释放原车道的目标; 3. 快速拾取新车道的目标; 4. 控制车辆加减速。 在点亮左侧转向灯并且保证与前车在安全距离的情况下时,超车辅助功能会适当拉近自车和前车的距离,方便驾驶员超车,但仅局限于自车道内,当自车切出时,重新回到定速巡航或者跟车巡航状态;超车辅助功能工作时本车速度范围为60-150km/h。 当同时满足以下条件时,超车辅助功能激活: 1) 驾驶员手动打左转向灯 2) 仪表车速大于60km/h 3) 自车前方存在跟车目标 4) 自车与前车相对速度<15m/s 当满足以下任一条件时,超车辅助功能应当被抑制激活: 1) 驾驶员手动打右转向灯 2) 本车道目标丢失 3) 超车辅助时间超过6s 4) 驾驶员向右打方向盘 5) 自车越过车道线 此外,超车辅助功能要求为: 1) 超车辅助加速最大车速受设定车速的限制 2) 超车辅助期间驾驶员踩油门进入Override时需要响应驾驶员请求,若驾驶员松开油门时依然完成超车辅助时间 3) 以驾驶员打转向灯触发为一次超车辅助 |
| 超车抑制 超车(右侧)抑制功能应当被关闭,即车辆在变道过程中ACC S&G不会给车辆加速,变道后车辆车速恢复到驾驶员设定车速。 |








5.1.2 ACC、AEB功能组合
测试示例如下:
详细用例,请私下交流,AIgraphX。
5.2 人机交互要求
5.2.1 人机输入
ACC的操作控制按键有5个:ON/OFF、SET/-、RES/+、Time Gap-、Time Gap+,另外,LIM开关按下时ACC应关闭。
ACC的设置操作应实现自适应巡航(ACC)和智能巡航(ICC)的切换。
- 车辆每次上电功能类型和功能的开关状态应为上一点火周期功能的状态,例如:上一次点火周期ACC为开,则新的点火周期ACC为开。巡航功能出厂设置为智能领航功能(ICC)且功能为开。
- EOL下线时,ICC 默认开启,此后记忆驾驶员选择。
- 短暂性故障或永久性故障接触后,功能类型是记忆的,功能的开关状态是关闭的,设置车速清零。
5.2.2 ON/OFF按钮
主开关(ON/OFF)应满足以下情况的ACC 功能的开启/关闭控制:
ACC 关闭时:按压ON/OFF 使ACC 功能开启;
ACC 功能开启但未激活时:按压ON/OFF 使ACC 功能关闭。
ACC 功能开启且已激活时:
短按ON/OFF 使ACC 退出激活
长按ON/OFF按钮ACC关闭(T>1.5s),若继续长按,ACC保持关闭状态。
5.2.3 SET/-、RES/+按钮
| ACC 状态 | RES/+ | Set/- |
| OFF | 无效 NA | 无效 NA |
| Stand-By | 每次功能开启无预存车速,显示为“- -Km/h” | 每次功能开启无预存车速,显示为“- -Km/h” |
| Active | 短按,车速增加1km/h | 短按,车速减少1km/h |
| BOM | ||
| Override | 短按,车速增加1km/h | 按“SET/-”键,将当前车速设定为目标车速,设定车速范围为30~150km/h;车速在0~30km/h时设定车速为30km/h |
| Stand-active | 前提:驾驶员踩住刹车 | 前提:驾驶员踩住刹车 |
| Stand-wait | 1)按“RES”键,ACC状态切换至Active mode | 前提:驾驶员踩住刹车 |
| Temporary Failure | 若IP显示“前方雷达污浊或失明“时,按“RES”键尝试激活;其他情况下,无效 | 若IP显示“前方雷达污浊或失明“时,按“SET”键尝试激活;其他情况下,无效 |
| Permanent Failure | 无效NA | 无效NA |
| ACC Stop&Go功能每次开启状态,默认的设定车速为30km/h; 此外,车辆处于静止状态(驾驶员踩刹车或Autohold处于激活状态),无论前方是否存在前车,驾驶员可通过RES或SET激活,ACC S&G进入STANDWAIT状态。 | ||
巡航速度调整具体逻辑如下:
- 驾驶员按下“SET/-”或“RES/+”时(No press -> Pressed),按键时长T开始计时;
- 按键时长T≤0.75 秒为短按;
- 按键时长T>0.75 秒为长按;
- 长按后若按键继续保持,则每隔0.75 秒判断巡航速度调整一次;
- 长按时巡航速度应为调节步长的整数倍(如当前巡航速度为76km/h,长按后应按80,85,90km/h...依次变化);
- 若巡航速度已达到最大(最小)值,继续增大(减少)巡航速度时其值保持不变。
ACC关闭或驾驶员熄火时,巡航速度应恢复为默认值30km/h。
不同车速下按RES/或SET/-键激活ACC:
| 自车车速 | 0 | 0.1~30km/h | 30.1~150km/h | |
| 第一次激活 | SET/- | 设定车速为30km/h | 设定车速为30km/h | 设定车速为当前车速 |
| RES/+ | 设定车速为30km/h | 设定车速为30km/h | 设定车速为当前车速 | |
| 同一开启周期第N次激活(N>1) | SET/- | 设定车速为30km/h | 设定车速为30km/h | 设定车速为当前车速 |
| RES/+ | 设定车速为记忆车速 | 设定车速为记忆车速 | 设定车速为记忆车速 | |
备注:
1)车速为0时,驾驶员在踩住刹车或AVH开启的前提下,按RES/+或SET/-键可以激活ACC,进入StandWait状态;在此状态下(踩住刹车),再按RES/+或SET/-键可进行设定车速加减;
2) 车速为0时,驾驶员在踩住刹车的前提下,按RES/+或SET/-键可以激活ACC,进入StandWait状态,驾驶员松开刹车后,再按RES/+键ACC状态可进入StandActive或Active状态,按SET/-键无作用;车速为0时,驾驶员在AVH开启的前提下,按RES/+或SET/-键可以激活ACC,进入StandWait状态,再按RES/+键ACC状态可进入StandActive或Active状态,按SET/-键无作用。
5.2.4 Time Gap-\Time Gap+按钮
在 ACC 打开后(Passive、Standby、Active、BOM、Override、Stand Active、Stand Wait),驾驶员可通过按“Time Gap-“或“Time Gap+”键调整车间时距。
车间时距调整按键不支持长按功能(即不能连续调节)。
当 ACC 关闭或驾驶员熄火时,车间时距恢复为默认值:远(1.9s)。
车间时距分为三档:1.0s,1.5s,1.9s。
驾驶员调节车间时距时,针对信号FRS_ALOD_TimeGapDisp,第一次按“Time Gap-“或“Time Gap+”键时显示当前驾驶员设定的车间时距,再次按“Time Gap-“或“Time Gap+”键时进行车间时距的调节,每次调节持续时长4s。
FRS_ALOD_TimeGap信号持续发送,在驾驶员未对车间时距进行设置更改之前,一直发送当前的车间时距。例如:当前车间时距为1.0s,此信号会一直发送1.0s的车间时距,若驾驶员通过按键设置车间时距为1.9s,则此信号在一直发送1.9s的车间时距,直至驾驶员下一次更改车间时距。
5.2.5 人机输出(仪表和HUD)
| ACC状态 | PO0 | PO1 | PO2 | PO3 |
| OFF | 不显示 | 不显示 | 不显示 | 不显示 |
| Stand-By | 显示(灰色) | 不显示 | 不显示 | 不显示 |
| Active | 显示(蓝色/黄色/红色) | 显示(白色) | 显示(白色) | 显示(白色) |
| BOM | 显示(蓝色/黄色/红色) | 显示(白色) | 显示(白色) | 显示(白色) |
| Override | 显示(灰色/黄色) | 显示(灰色) | 显示(灰色) | 显示(灰色) |
| Stand-active | 显示(蓝色) | 显示(白色) | 显示(白色) | 显示(白色) |
| Stand-wait | 显示(蓝色) | 不显示 | 不显示 | 不显示 |
| Temporary Failure | 不显示 | 不显示 | 不显示 | 不显示 |
| Permanent Failure | 不显示 | 不显示 | 不显示 | 不显示 |
5.3 状态机/工作序列
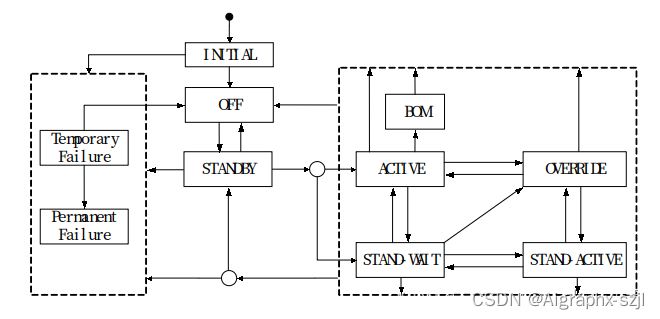
状态转移
| 序号 | 切换前 | 切换后 | 切换条件 |
| 1 | Intial | OFF | 初始化完成 |
| 2 | Intial/OFF/ StandBy/Active/ BOM/Stand-Wait/ Stand-Active | Permanent Failure | 满足可逆故障,DTC列表 |
| 3 | StandBy/Active/ BOM/StandWait/ Stand-Active | Temporary Failure | 满足不可逆故障,DTC列表 |
| 4 | OFF | StandBy | ACC主开关短按 AND立即解除条件为AND软解除条件为假 AND符合激活车速及车辆状态 |
| 5 | OFF | StandBy | ACC主开关短按 AND抑制激活(立即解除条件为真 OR 软解除为真 OR不符合激活车速及车辆状态)为真 |
| 6 | StandBy | OFF | ACC主开关短按 OR LIM主开关短按 |
| 7 | StandBy | OFF | ACC主开关短按 OR LIM主开关短按 |
| 8 | StandBy | Active | 驾驶员按SET/-或RES/+键 AND车辆静止为假 AND驾驶员主动加速为假 |
| 9 | StandBy | Stand-Wait | 驾驶员按SET/-或RES/+键AND车辆静止为真 AND驾驶员主动加速为假 AND车辆制动(驾驶员踩制动踏板/AVH激活)为真 |
| 10 | Active | OFF | LIM主开关短按 |
| 11 | Active | StandBy | 立即解除条件为真OR软解除条件为真且CDD未进行制动 |
| 12 | Active | Override | 驾驶员主动加速为真 |
| 13 | Active | Stand-Active | 车辆静止 AND |
| 14 | Active | BOM | 软解除条件为真ANDCDD进行制动 |
| 15 | BOM | OFF | LIM主开关短按 |
| 16 | BOM | StandBy | BOM结束条件OR立即解除条件为真 |
| 17 | Stand-Active | OFF | LIM主开关短按 |
| 18 | Stand-Active | StandBy | 软解除条件为真OR(立即解除条件为真AND驾驶员踩制动踏板为假AND近距离目标丢失AND 高于车速上限为假) OR静止状态车辆非静止OR车辆静止无制动压力 |
| 19 | Stand-Active | Override | 驾驶员主动加速为真 |
| 20 | Stand-Active | Active | 驾驶员未踩制动踏板AND当前工况允许起步(前方车辆起步/前方车辆渐行渐远至消失)为真 |
| 21 | Stand-Active | Stand-Wait | Stand-Active时间超过3s OR检测到行人 |
| 22 | Stand-Wait | OFF | LIM主开关短按 |
| 23 | Stand-Wait | StandBy | 软解除条件为真OR(立即解除条件为真AND驾驶员踩制动踏板为假AND 近距离目标丢失AND 高于车速上限为假) OR静止状态车辆非静止OR车辆静止无制动压力OR车辆跟停后,静止持续3分钟后EPB激活 |
| 24 | Stand-Wait | Override | 驾驶员主动加速为真 |
| 25 | Stand-Wait | Active | 驾驶员未踩制动踏板AND当前工况允许起步(前方车辆起步/前方车辆渐行渐远至消失)为真AND静止状态激活(驾驶员按RES/+键或轻踩油门) |
| 26 | Stand-Wait | Stand-Active | 驾驶员未踩制动踏板AND当前工况允许起步(前方车辆起步/前方车辆渐行渐远至消失)为假AND静止状态激活(驾驶员按RES/+键或轻踩油门) |
| 27 | Override | OFF | LIM主开关短按 |
| 28 | Override | StandBy | 立即解除条件OR软解除条件OR驾驶员主动加速超时 |
| 29 | Override | Active | 驾驶员主动加速为假 |
| 30 | Temporary Failure | OFF | 故障消失超过3s AND系统故障前功能关闭 |
| 31 | Temporary Failure | StandBy | 故障消失超过3s AND系统故障前功能开启 |
| 32 | Temporary Failure | StandBy | 满足不可逆故障 |
6. 性能要求
6.1 ACC系统性能验收指标
| 功能 描述 | 性能项 | KPI | ||||
| 通用 指标 | 最高工作车速 | 150km/h | ||||
| 最低工作车速 | 0km/h | |||||
| 加速度范围 | 满足ISO 15622 | |||||
| 减速度范围 | 满足ISO 15622 | |||||
| 减速度变化率范围 | 满足ISO 15622 | |||||
| 定速 巡航 | 最高超过车速 | ≤5% | ||||
| 达到设定车速10s后,稳定车速误差范围 | ≤±2km/h | |||||
| 节能模式下,30km/h至120km/h加速时间与0~100km/h加速时间的比例 | (3.0~3.7)倍 | |||||
| 普通模式下,30km/h至120km/h加速时间与0~100km/h加速时间的比例 | (3.0~3.4)倍 | |||||
| 运动模式下,30km/h至120km/h加速时间与0~100km/h加速时间的比例 | (2.7~3.0)倍 | |||||
| 跟车 巡航 | 最小车距与目标车距的比值 | ≥75% | ||||
| 稳定车距与目标车距差值的比值 | ≥90% | |||||
| 摄像头雷达融合后的识别到目标车辆的平均车距 | 140m | |||||
| 自车能够跟随前车减速到停,应保持车距 | (2~3)m | |||||
| 具备车道线信息 | 前车切入时 | 目标车辆的30%±10%已经进入本车道线内 | ||||
| 前车切出时 | 目标车辆的25%±10%已经进入相邻车道线内 | |||||
| 自车切入时 | 自车的30%±10%已经进入目标车道内 | |||||
| 自车切出时 | 自车的25%±10%已经进入相邻车道内 | |||||
| 无车道线信息 | 前车切出时,目标释放重叠率要求 | 25%~-9% | ||||
| 前车切入时,目标识别重叠率要求 | -42%~8% | |||||
| 自车切出时,目标释放重叠率要求 | 25%~-9% | |||||
| 自车切入时,目标识别重叠率要求 | -42%~8% | |||||
| 稳定环境下,相邻车道干扰次数/1000Km | <2 | |||||
| 稳定环境下,目标丢失次数/1000Km | <5 | |||||
| 弯道 巡航 | 车辆横向加速度 | 满足ISO 15622 | ||||
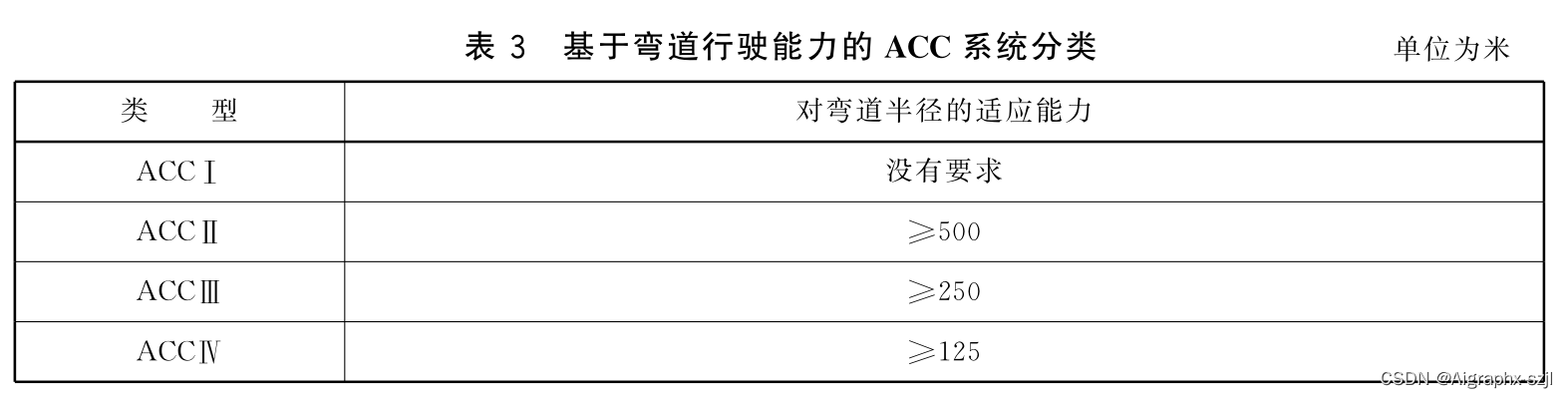
| 已经稳定进入弯道内时,最小跟随弯道半径 | 125m | |||||
| 临界弯道半径与最大速度对应关系 | 20m | 50m | 200m | 600m | ||
| 10km/h | 30km/h | 70km/h | 150km/h | |||
备注:很多公司目前还增加上下坡场景测试。
6.2 ACC加减速度要求指标
根据ISO 15622对ACC加速度的要求,当自车行驶速度低于5m/s时,系统2秒内平均加速度不应超过4m/s2; 当自车行驶速度高于20m/s时,系统2秒内平均减速度不应超过4m/s2。
根据ISO 15622对ACC减速度的要求,当自车行驶速度低于5m/s时,系统2秒内平均减速度不应超过5m/s2; 当自车行驶速度高于20m/s时,系统2秒内平均减速度不应超过3.5m/s2。
根据ISO 15622对ACC减速度变化率的要求,当自车行驶速度低于5m/s时,系统1秒内减速度的平均变化率不应超过5m/s2; 当自车行驶速度高于20m/s时,系统1秒内减速度的平均变化率不应超过2.5m/s2。
6.3 i-VISTA SM-ADAS-ACCR-A0-2018规程指标
中国汽车工程研究院股份有限公司出品了自适应巡航控制系统评价规程(Adaptive Cruise Control System Rating Protocol)i-VISTA SM-ADAS-ACCR-A0-2018规程。本规程规定了i-VISTA中国智能汽车指数评价体系自适应巡航控制系统ACC的评价方法,适用于整备质量不超过3500kg的载客车辆(M1类)。其他车辆可参照执行。
ACC评价包含目标车静止、目标车低速、目标车减速、50%横向重叠共4个场景,以及抬头显示、自适应限速、走停功能等3个加分项,如表1所示,从体验和安全两个指标计算得分。

7. 验证
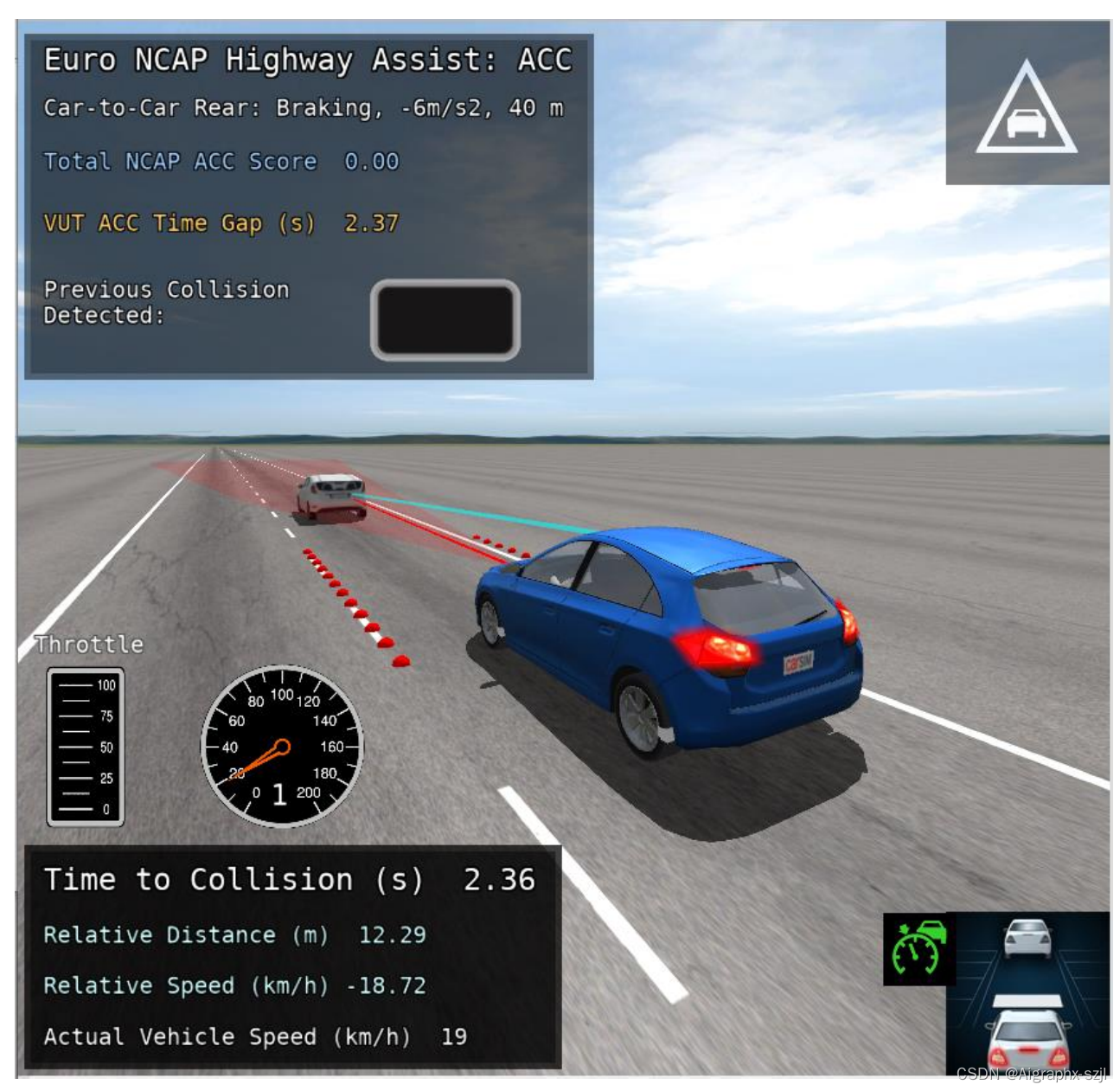
借助自带驾驶场景要素,ACC的性能通过硬件在环模拟和实车测试进行评估。除此之外,性能还会通过实车耐久性测试和场地测试进行评估。
7.1 场景要素
7.1.1 车辆与目标
7.1.1.1 本车
7.1.1.2 目标车
类型
乘用车
卡车
公交车
特种车辆
拖车
非法规类型的车
摩托车
电动车
特别大的东西:要告知
特别小的:凸包
状态
静止
运动
同向
纵向:匀速 减速 加速
横向:切入 切出
逆向
纵向:匀速 减速 加速
横向:切入 切出
新旧
7.1.2 道路
7.1.2.1 道路弯曲
直线道路
弯曲道路
高
中
低
>250m 200/150m
7.1.2.2 道路类型
高速公路
高速公路带路肩
高速公路不带路肩
高速公路匝道进口
高速公路匝道出口
高速公路道路末尾
高速公路使路肩
高速公路软路肩
高速公路紧急停车带
高速公路休息区/服务区
特点
道路封闭 法规目标 左右分离/有中间隔离带
城市道路
机动车道 非机动车道 斑马线 红绿灯路口 安全停车线 公交车道 BRT 学校
乡村道路
车道线清晰 车道线不清晰 无车道线 道路窄
山区道路
转弯半径
上坡/下坡
隧道
7.1.2.3 道路布局
单向行道
双向车道
有无隔离
硬路肩
软路肩
紧急停车带
休息区
交叉口
只有红绿灯
无红绿灯
环道道路
交叉口禁止停车
进入十字路口/环岛
前方无红绿灯的十字路口
在有交通灯的十字路口
在环岛前方
在前方不应停车的十字路口
进入十字路口/环岛
前方无红绿灯的十字路口
在有交通灯的十字路口
在环岛前方
在前方不应停车的十字路口
交通信号位置
边上
路中间
悬梁上
7.1.2.4 车道线
车道线类型
实线
虚线
虚实线
实虚线
双实线
双虚线
朝夕车道线
粗虚线
粗实线
左右车道线
左车道线+右车道线
左车道线+右马路沿
左马路沿+右车道线
左车道线
右车道线
无车道线
车道线颜色
白色
黄色
蓝色
红色
车道线宽度
3.6米
一般要求2.5-5.2米
车道线合并
快速合并 慢速合并
车道线分离
快速分离 慢速分离
车道线不清晰
车道线消失
车道线新旧重合
车道线磨损
7.1.2.5 道路路面
路面附着系数
路面种类
雪
雨水
冰
泥
水泥路面
柏油路面
对开
对接
变附着路面
棋盘路面
路面坡度
带坑路面
带坡路面
大中小
上下
交叉路面
7.1.3 交通信号
红绿灯
限速标识
超车
限重
限高
道路入口
道路出口
警示标识
7.1.4 环境条件
天气
晴天 雨天 雪天 雾天 大风 高温 低压
光照
低光照条件(如日出)
正常照明亲件
逆光
夜间驾驶无任何光源
夜间驾驶,有灯光
夜间驾驶--司机被逆光
道路环境
道路泥li --- 一个传感器行不通
阴影
绿化带
栅栏
绿色植物
铁栅栏
水泥栅栏
桥
隧道
建筑物
7.2 交通流
正常交通
交通堵塞
中速堵塞(>50公里/小时)
低速行驶时的交通堵塞 (<50公里/小时)
交通繁忙/走走停停
紧急通道
事故交通
靠近道路工程的交通
7.3 周围元素相对于车辆的状态
本车匀速,无目标
前方目标较大跟车时距下高速行驶
前方目标正常跟车时距下高速行驶
前方目标较小跟车时距下高速行驶
前方目标较大跟车时距下中速行驶
前方目标正常跟车时距下中速行驶
前方目标较小跟车时距下中速行驶
前方目标较大跟车时距下低速行驶
前方目标正常跟车时距下低速行驶
前方目标较小跟车时距下低速行驶
前方目标以小制动减速度下制动
前方目标以中制动减速度下制动
前方目标以大制动减速度下制动
前方目标以小加速度下加速
前方目标以中加速度下加速
前方目标以大加速度下加速
目标车辆加速切出
目标车辆匀速切出
目标车辆减速切出
目标车辆切出时无目标
目标车辆切出时有新目标
新目标匀速
新目标加速
新目标减速
新目标静止
侧面车辆加速切入
侧面车辆匀速切入
侧面车辆减速切入
侧面车辆切入时无目标
侧面车辆切入时有目标
新目标匀速
新目标加速
新目标减速
新目标静止
前方目标静止
前方行人以恒定速度前进
前方行人以恒定速度穿越马路
行人/自行车/动物静止在道路前方
行人/白行车/动物静止在道路边上
7.4 车辆操纵
7.4.1 驾驶员状态
驾驶员监视
HOD Hand On Detection
DMS Driver Monitoring Systems
驾驶员监视和控制车辆
驾驶员无监视
驾驶员接管
驾驶员无接管
7.4.2 车辆控制
转向
加速
换挡
制动
刹车失效
紧急制动
滑行
7.4.3 HMI控制
开关
显示
车辆
目标
行人
摩托车
电瓶车/自行车
车道线
线形
曲率
功能提示
功能开启/关闭
故障设定
速度TSR
驾驶员提醒
HUD
声音/震动
7.4.4 控制状态
巡航
跟车
跟停
resume启动换道
驾驶员接管
驾驶员抑制
泊车
7.5 传感器性能验证
目标纵向、横向范围性能验证。
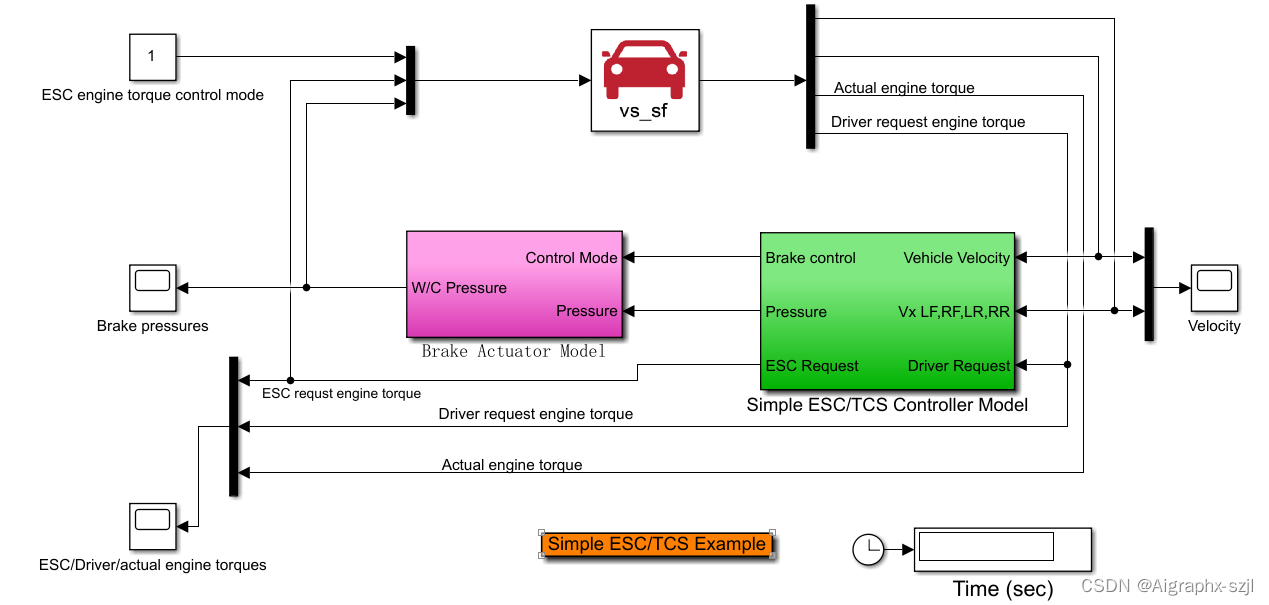
7.6 执行器性能验证
主要分制动系统和动力系统。
C:\xcc\Public\Documents\CarSim2019.1_Data\Extensions\Simulink\ tcs_CS2017.mdl
关于执行器性能详细要求部分,请参见下面博文:
19-6 ACC对执行器性能详细要求_Aigraphx-szjl的博客-CSDN博客
7.7 MIL/SIL ACC功能和性能验证
MIL/SIL
软件集成测试-信号接口测试
状态机测试
功能测试
HIL
系统集成测试-信号接口测试
状态机测试
功能测试,包括底层通信、故障处理等测试
故障注入
接口验证
状态机验证
功能验证
性能验证
本专栏目的是引导大家怎么开发ACC产品,部分文字、图例来自网络,侵权即删。


















 642
642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











