






1. 概述
基于检测的目标跟踪算法中通常分为两个模块:目标检测模块和跟踪匹配模块。目标检测模块主要负责从视频中抽取出帧图像,并提取出目标信息,包括目标位置、形状以及类别概率等;而跟踪匹配模块需要将不同帧图像中的目标进行匹配,判别出相邻两帧图像中,哪些目标是同一个目标,找出后赋予 id 进行标识。常见的基于检测的目标跟踪算法框架有 SORT 和 DeepSORT。
2. SORT算法
SORT 跟踪算法框架提供了一种基于 IOU 的目标匹配方法,它由以下几个部分组成:检测模块、预测模块、关联模块和跟踪目标生命周期的管理模块。
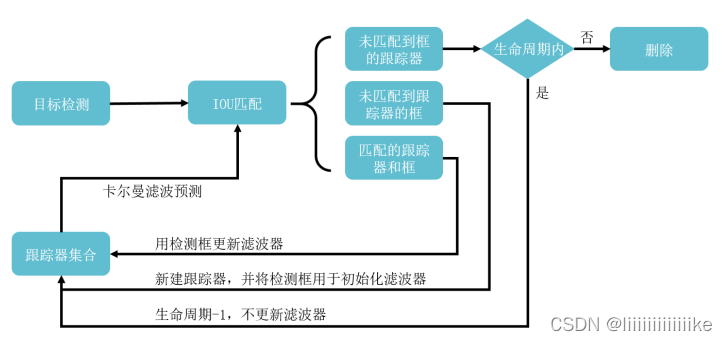
(1)检测模块
检测模块通常为一些通用的目标检测算法,如 Faster R-CNN、YOLO V3 等,完成检测后便将得到的检测框信息输出。检测模块相对于其他模块而言比较独立,仅负责检测任务即可,但它的检测准确性极大程度上决定了跟踪的准确性。
(2)预测模块
SORT 的预测模型主要将目标的标识等信息传输到下一帧,它采用一个匀速模型来对物体的每一帧位移做近似预测。每个目标的预测模型相对独立,并且也独立于拍摄物体的摄像机,在预测模型中,每个目标的状态如公式 2-1 所示。其中,𝑢和𝑣代表目标中心的 x 和 y 坐标,𝑠和𝑟分别表示目标检测框的面积和长宽比,而𝑢̇、𝑣̇和𝑠̇则表示下一帧预测框的中心坐标和面积。当跟踪器匹配到检测框后,使用该检测框的信息更新状态向量;若目标没有匹配到检测框,则使用线性模型而不需要修正。

(3)关联模块
通过预测模块,算法可以得到目标在下一帧中的预测状态,通过下一帧中预测状态和观测状态的差异,可以通过相似度构建代价矩阵,而 SORT 算法中,用于构建代价矩阵的差异衡量标准为 IOU 值。当 IOU 值小于一定阈值时,则拒绝将该观测状态匹配给该目标。IOU 的好处在于计算方便,并且可以解决目标的短期遮挡问题,当两个目标重叠时,图层上方的目标仍然可以得到分配的检测框,而图层下方的目标则继续生存,短时间内遮挡解除后仍然可以继续完成跟踪。
(4)跟踪目标生命周期的管理模块
在 SORT 算法中,每一个被检测模块捕获的目标都会视为待跟踪目标,拥有一个生命周期。当某个目标刚出现时,SORT 便为它创建标识和状态模型,而当某个目标在画面中消失的帧数超过一定范围时,其标识和模型将被销毁。首次被检测到时,目标的首个检测框将作为状态中的初始值,速度分量初始为 0,速度分量的协方差会被初始化为一个很大的值,表示速度的变化暂时不确定。
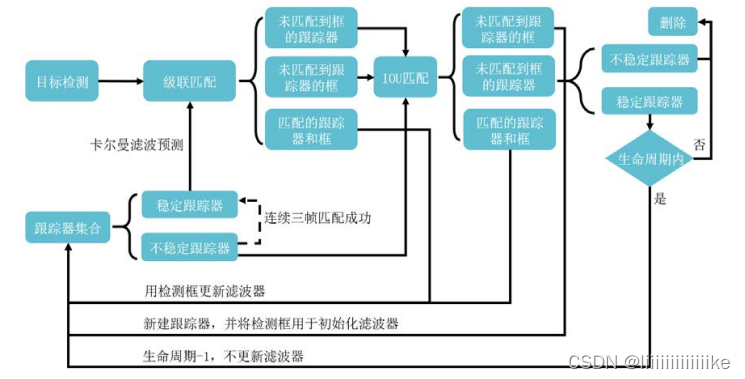
3. DeepSORT算法
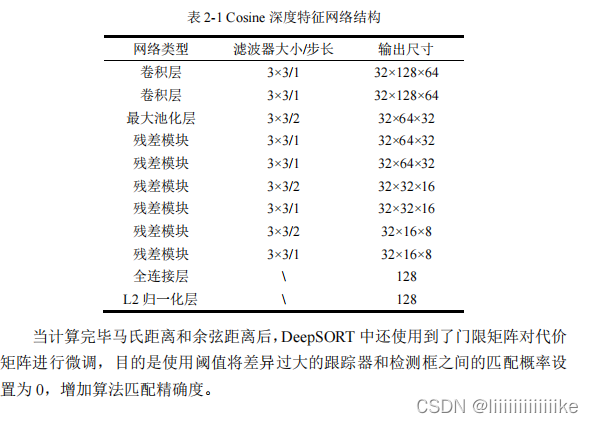
传统的 SORT 算法在构建代价矩阵时只考虑了相邻两帧中目标的定位类差异,很难通过目标特征信息减少匹配误差。DeepSORT 算法便是在 SORT 的基础上增加了 ReID 网络模型提取检测框的外观特征,并采用级联匹配的方式完成相邻两帧之间目标的匹配,相对于 SORT 来看,减少了目标 ID 切换的次数。DeepSORT 的整体流程如下图所示,可以分为检测模块、预测模块、级联匹配模块和跟踪目标的生命周期管理模块,其中与 SORT 差异最大的为级联匹配模块。















 1187
1187











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











