







 本文介绍了伺服驱动器中定位轴的轴回零机制,区分了绝对值编码器和增量编码器的校准方法,并详细解释了如何通过Mode设置不同的回零模式,包括主动和被动回零,以及在执行MC_MoveAbsolute指令前的必要步骤。
本文介绍了伺服驱动器中定位轴的轴回零机制,区分了绝对值编码器和增量编码器的校准方法,并详细解释了如何通过Mode设置不同的回零模式,包括主动和被动回零,以及在执行MC_MoveAbsolute指令前的必要步骤。
一:回零说明
对于定位轴,在进行绝对定位时,轴的坐标零点必须是已知的,轴的零点标定与电动机的位置反馈所使用的编码器类型相关。电动机轴上的编码器通常可分为绝对值编码器及增量编码器两种类型。
1:对于绝对值编码器,仅需要进行一次绝对值编码器的零点校正即可;
2:对于增量编码器,由于位置无法保持,因此每次设备上电后,必须通过执行主动回零运动来确定轴的机械零点坐标。
3:工艺对轴轴回零使用命令"MC_Home"即可,增量编码器主动回零选择"Mode"=3,绝对值编码器校准选择"Mode"=7(Mode 6 和 7 仅用于带模拟驱动接口的驱动器和 PROFIdrive 驱动器。)
4:"Mode"=0,1,6,7 时 任何其它运动控制命令均无法中止 MC_Home 命令。同时,MC_Home 命令不会中止任何激活的运动控制命令。按照新的回原点位置(输入参数“Position”的值)进行回原点操作后,将继续执行与位置相关的运动命令。
5:"Mode"=2,时 使用MC_Home 命令 Mode = 2、3可以中止当前回原点动作, 按照新的回原点位置(输入参数“Position”的值)进行回原点操作后,将继续执行与位置相关的运动命令。
6:"Mode"=3,时 MC_Home 命令 Mode = 3,MC_Halt, MC_MoveAbsolute ,MC_ MoveRelative, MC_MoveVelocity, MC_MoveJog, MC_CommandTable等命令中止当前会原点动作。
7:
Mode: 回原点模式值
- Mode = 0: 绝对式直接回零点,轴的位置值为参数“Position”的值
- Mode = 1: 相对式直接回零点,轴的位置值等于当前轴位置 + 参数“Position”的值
- Mode = 2: 被动回零点,轴的位置值为参数“Position”的值
- Mode = 3: 主动回零点,轴的位置值为参数“Position”的值
- Mode = 6:绝对编码器相对调节,将当前的轴位置设定为当前位置+参数“Position”的值
- Mode = 7:绝对编码器绝对调节 ,将当前的轴位置设置为参数“Position”的值
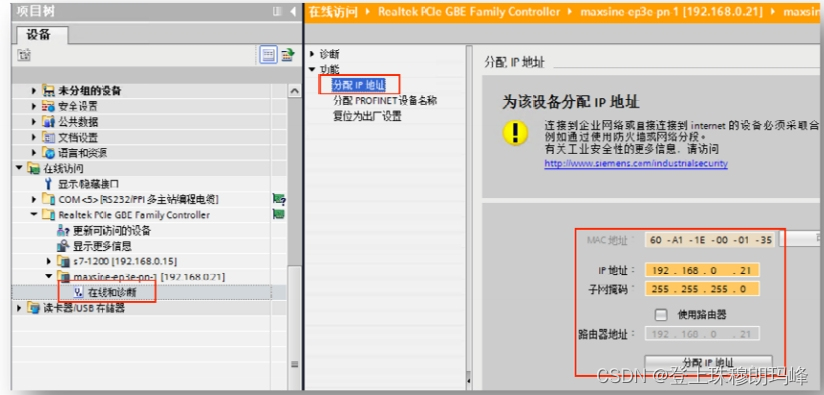
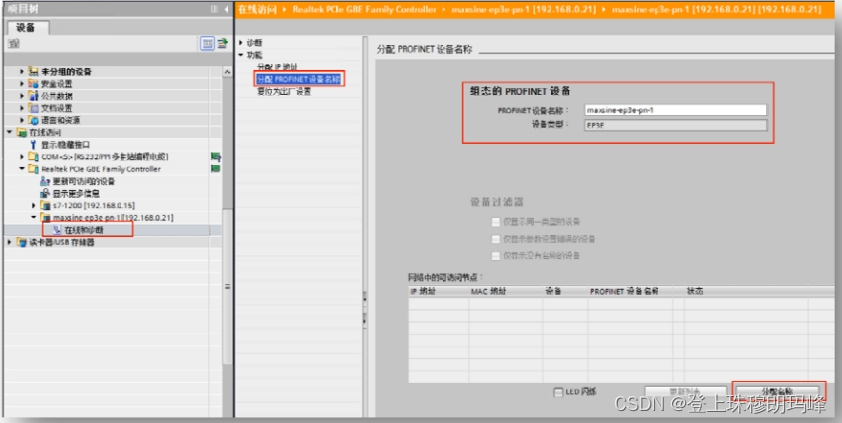
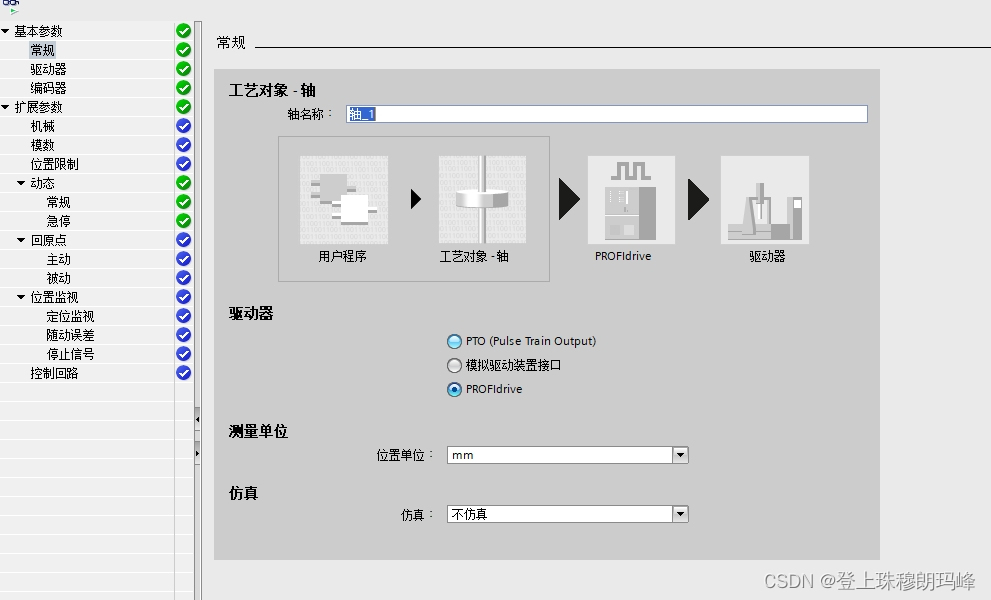
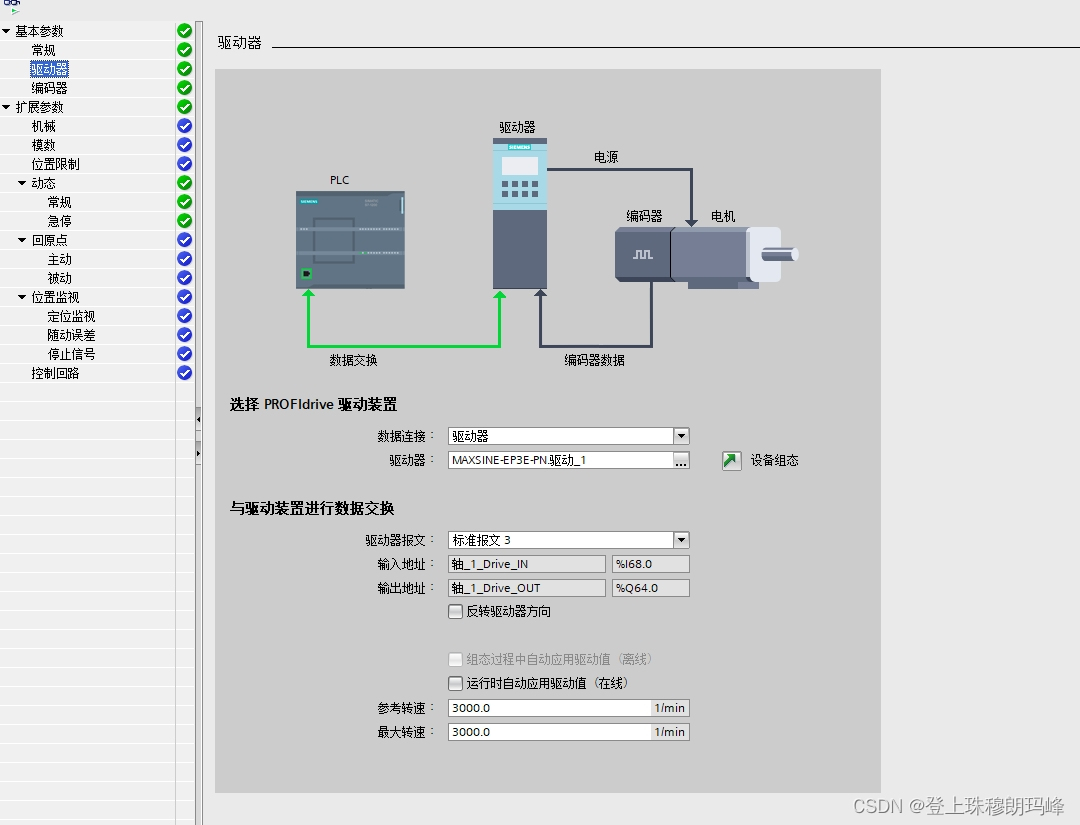
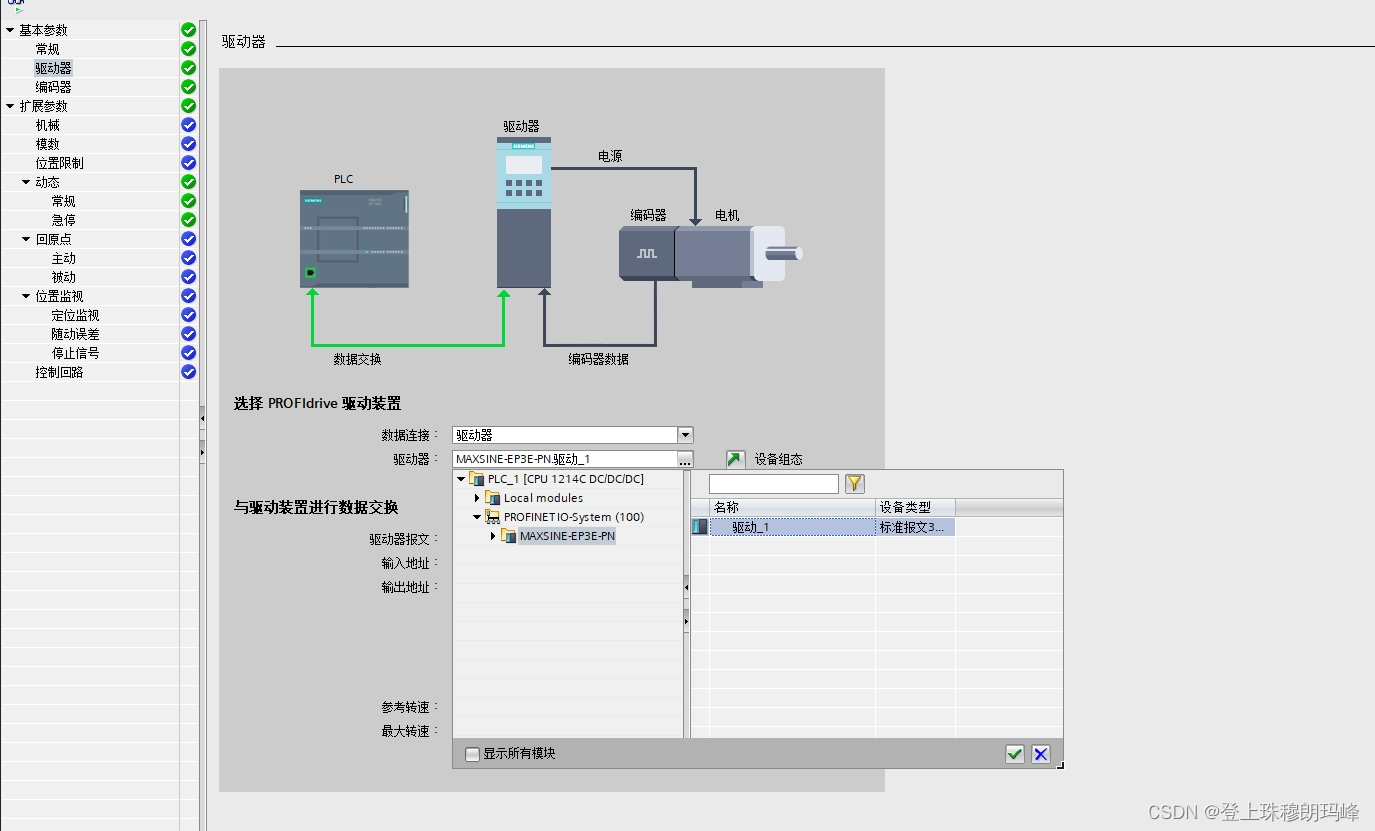
组态时,通过在线和诊断功能,为伺服驱动器设置名字与IP,需要注意的是,必须和项目中一样。

指令说明:
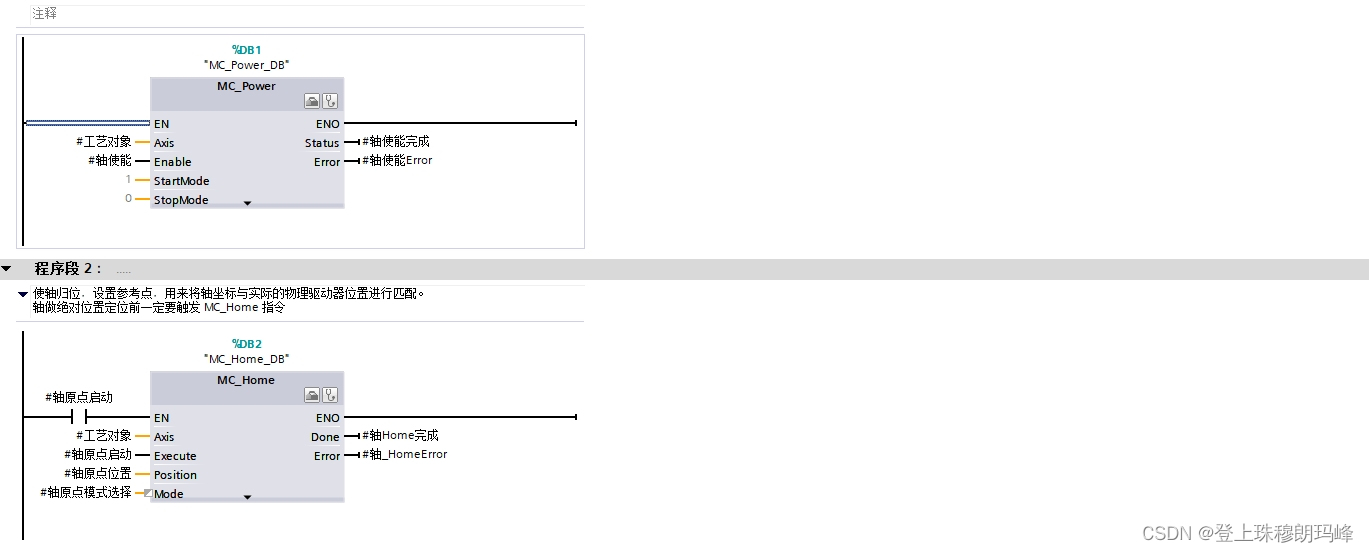
1:MC_Power (启动/禁用轴。)
EN:该输入端是MC_Power指令的使能端,不是轴的使能端。MC_Power 指令必须在程序里一直调用,并保证MC_Power指令在其他Motion Control指令的前面调用。
StartMode:轴启动模式
Enable = 0: 启用位置不受控的定位轴即速度控制模式。Enable = 1:启用位置受控的定位轴即位置控制(默认)注意: 1.使用带 PTO (Pulse Train Output) 驱动器的定位轴时忽略该参数。 2. 只有在信号检测(False 变为 True)期间才会评估 StartMode 参数。
StopMode:轴停止模式
StopMode= 0:紧急停止。StopMode=1:立即停止。StopMode=2:带有加速度变化率控制的紧急停止。
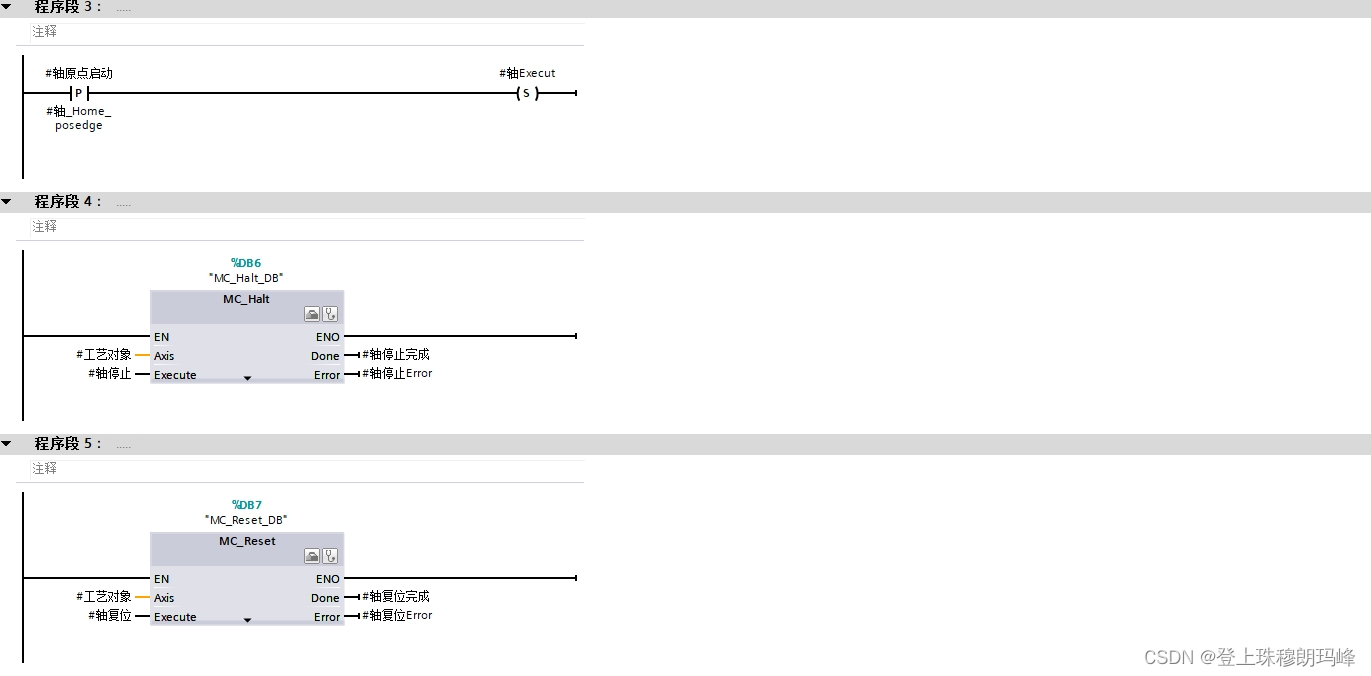
MC_Halt:停止轴运行指令
常用MC_Halt指令来停止通过MC_MoveVelocity指令触发的轴的运行。
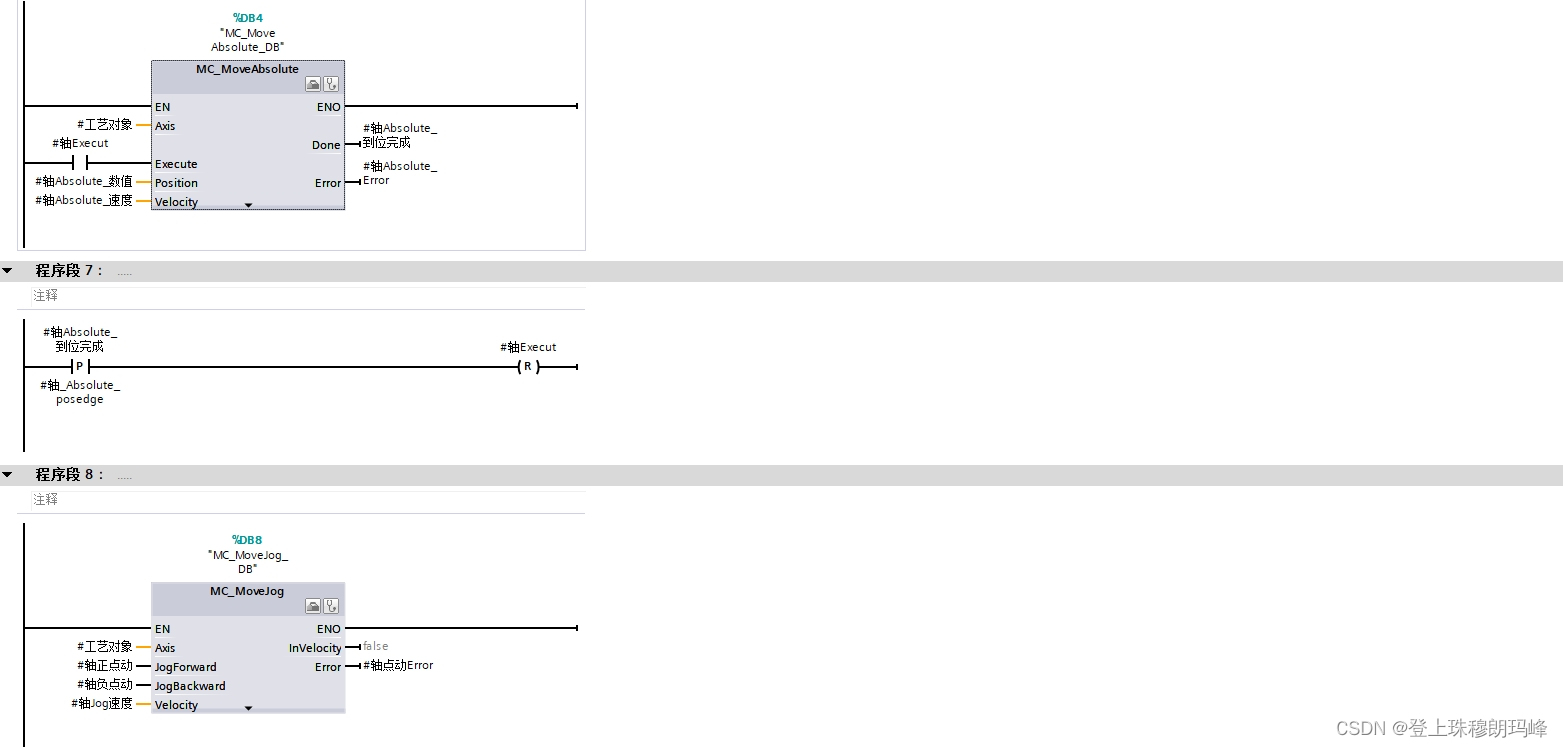
MC_MoveAbsolute:绝对位置指令
在使能绝对位置指令之前,轴必须回原点。因此MC_MoveAbsolute指令之前必须有MC_Home指令。①Position:绝对目标位置值。②Velocity:绝对运动的速度。
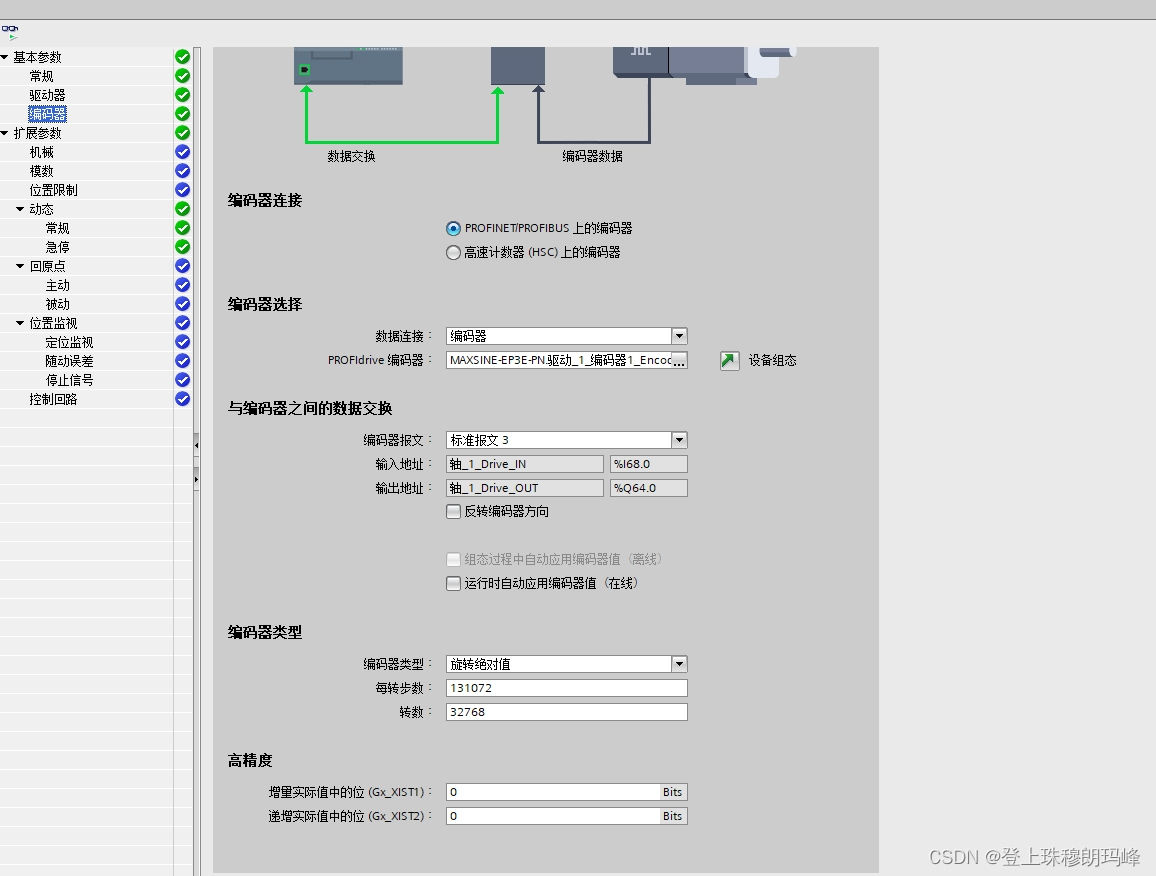
其中编码器类型:旋转绝对值的每转步数=131072,转数=32768.
旋转增量的每转步数=131072,高精度=0。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









