






 本文介绍了几个关键的IT技术函数,如数值到字符串转换(NumToStr),字符串长度检测(StrLen),字符串查找(StrFind)和分割(StrPart),以及与机器人定位相关的函数如位置读取(CRobT)、坐标获取(GrabX)和欧拉角计算(OrientZYX)。
本文介绍了几个关键的IT技术函数,如数值到字符串转换(NumToStr),字符串长度检测(StrLen),字符串查找(StrFind)和分割(StrPart),以及与机器人定位相关的函数如位置读取(CRobT)、坐标获取(GrabX)和欧拉角计算(OrientZYX)。
亲测能用,看不清,屏幕放大即可,清晰的还不错,指令说明再程序下方。如有问题可以留言一起讨论!!!!!!
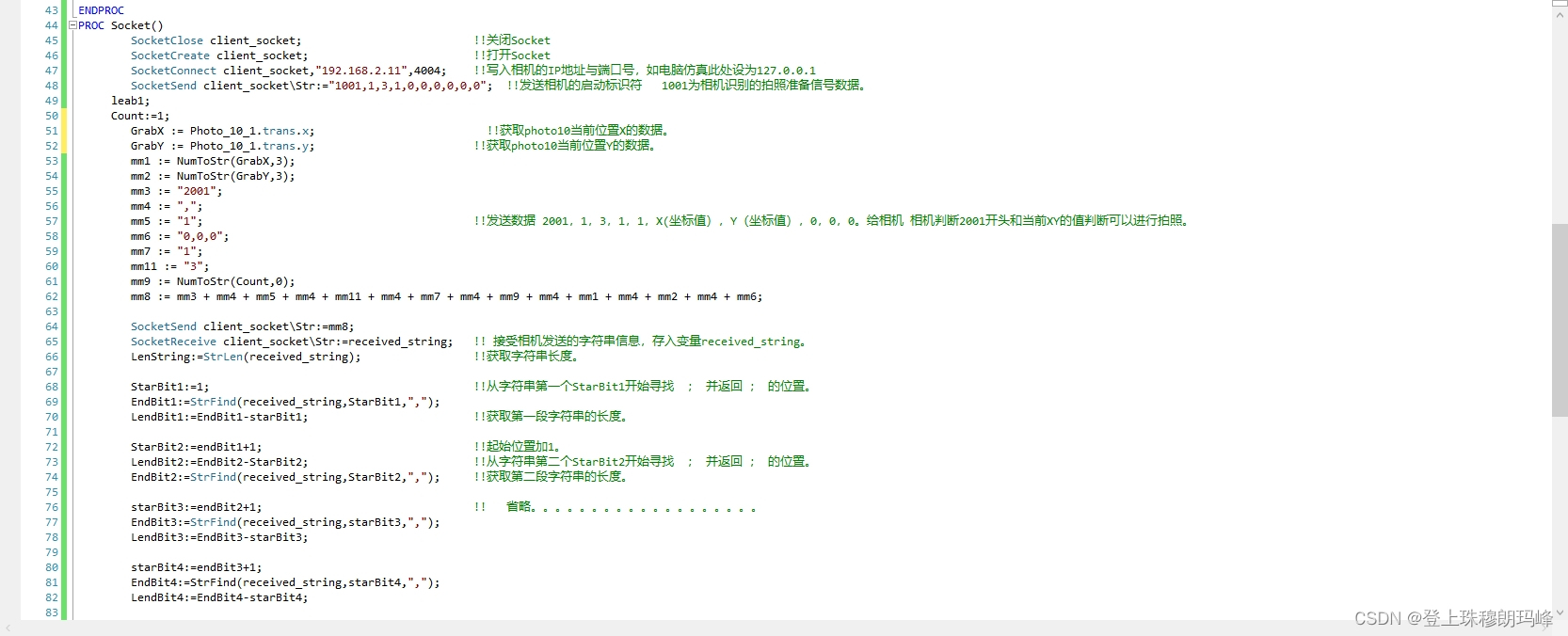
1:**** :=NumToStr(0.225798 ,3)用于转换数值为字符串
****获取的字符串长度为0.225 去前三位其它省略
| 通过指定的小数位数,如有要求,可通过指数,将数值转换为字符串。如有必要,将数值四舍五入。如果不包括任何小数,则抑制小数点。 |
2:StrLen(String Length)用于发现一个字符串的当前长度。
LenString:=StrLen("Start"); 长度为5。
| 字符串中的字符数量(>=0)。 |
3:StrFind(String Find)用于在一个字符串中搜索始于一个指定位置、属于一组指定字符的一个字符。
EndBit1:=StrFind(received_string,StarBit1,",");
从字符串received_string(string类型)第一个StarBit1开始寻找 “ ,” 并返回 , 的位置。
| 位于属于指定集合的规定位置或其后位置的第一个字符的字符位置。如果未发现此类字符,返回字符串长度+1。 |
4:StrPart - 寻找一部分字符串
kaitou:=StrPart(received_string,starBit1,LendBit1);
从字符串中starBit1开始截取LendBit1长度的字符串并赋值给 kaitou。
| 指定字符串的子串,其拥有规定的长度,并始于指定字符位置。 |
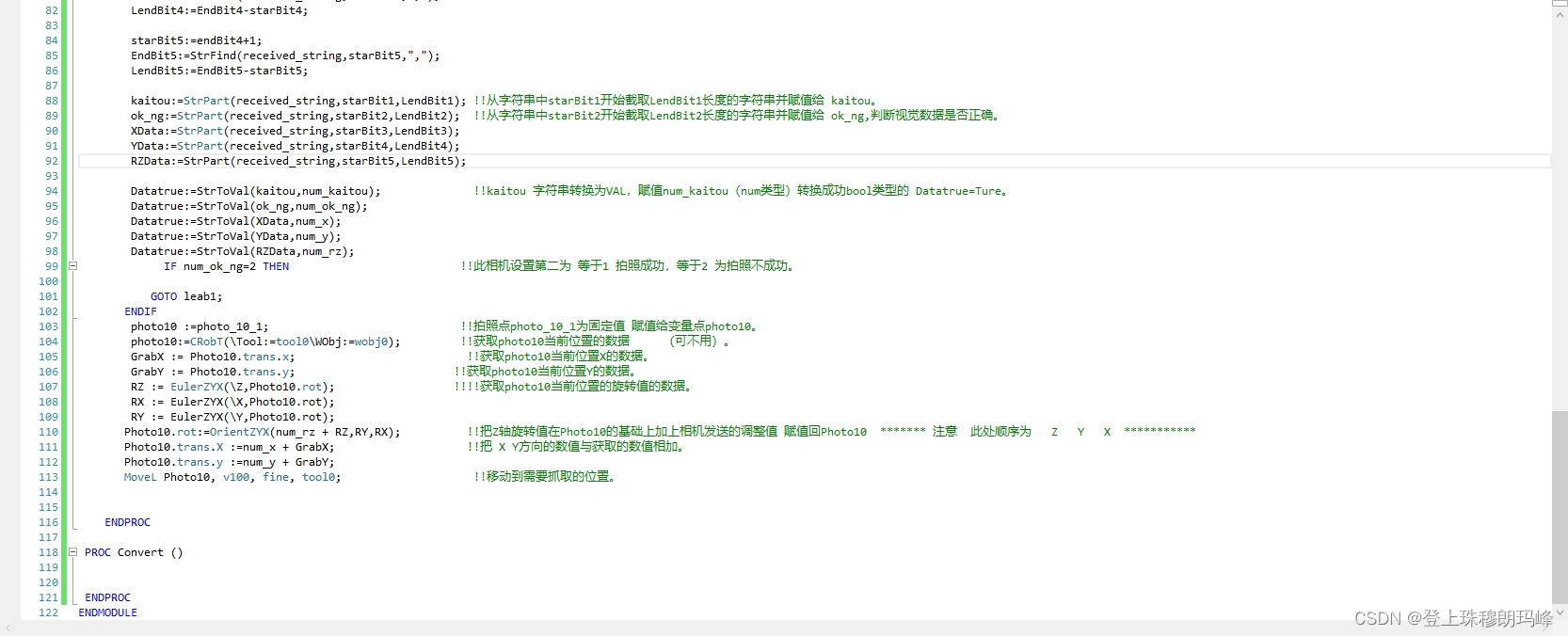
5:StrToVal - 将一段字符串转换为一个值
Datatrue:=StrToVal(kaitou,num_kaitou);
kaitou 字符串转换为num,赋值num_kaitou(num类型)转换成功num类型的 Datatrue(bool类型)=Ture。
6: CRobT - 读取当前位置(机器人位置)数据
| 该函数返回robtarget值以及位置(x、y、z)、方位(q1 ... q4)、机械臂轴配置和外轴位置。如果仅读取机械臂TCP(pos)的x、y和z值,则转而使用函数CPos。 |
7: GrabX := Photo10.trans.x; trans .x 获取x方向位置
Photo10.trans.Y; trans .y 获取y方向位置
8: RZ := EulerZYX(\Z,Photo10.rot); EulerZYX 获取欧拉角 (以度为单位范围为-180-180)
9: Photo10.rot:=OrientZYX(num_rz + RZ,RY,RX); 用于建立一个不含欧拉角的定向变量。


















 1571
1571

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









