







 本文详细介绍了如何在RK3568平台上针对Android11系统调试MPU6500陀螺仪模块,包括MPU6500的功能特性、dts配置、驱动文件配置、系统配置以及解决自动旋转等问题。通过校准和调试,确保陀螺仪能准确跟踪设备运动并应用于系统方向变化。
本文详细介绍了如何在RK3568平台上针对Android11系统调试MPU6500陀螺仪模块,包括MPU6500的功能特性、dts配置、驱动文件配置、系统配置以及解决自动旋转等问题。通过校准和调试,确保陀螺仪能准确跟踪设备运动并应用于系统方向变化。
一,MPU6500功能介绍
1.简介
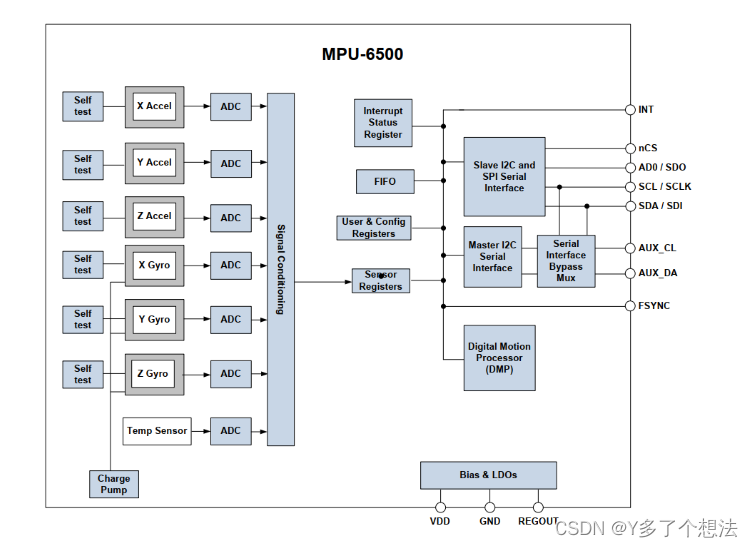
MPU6500是一款由TDK生产的运动/惯性传感器,属于惯性测量设备(IMU)的一种。MPU6500集成了3轴加速度计、3轴陀螺仪和一个板载数字运动处理器(DMP),能够提供6轴的运动数据。这些数据包括加速度和角速度,分别对应于x, y, z轴。
MPU6500的接口类型包括I2C和SPI,支持数字输出。它可以通过I2C或SPI接口与单片机或其他电子设备进行通信,以获取设备的状态和数据。此外,MPU6500还支持SPI通信模式,这使得其在某些应用中更为灵活。
2.性能与应用
性能方面,MPU6500具有较高的功耗效率和较小的封装尺寸,实现了业内领先的消费类陀螺仪性能。它还在加速计噪声、偏置和灵敏度方面进行了重大改进,进一步提升了其实用性和可靠性。
MPU6500被广泛应用于多种应用程序中,如飞控系统、机器人、可穿戴设备等,特别是在需要高精度运动数据的场合。例如,有报道提到,大疆精灵3的飞控IMU就是采用了InvenSense的MPU6500芯片,显示出其在实际应用中的广泛适用性和良好性能。
总的来说,MPU6500是一款功能强大且性价比高的MEMS运动跟踪设备,适用于各种需要精确运动数据的应用场景。
二,dts配置
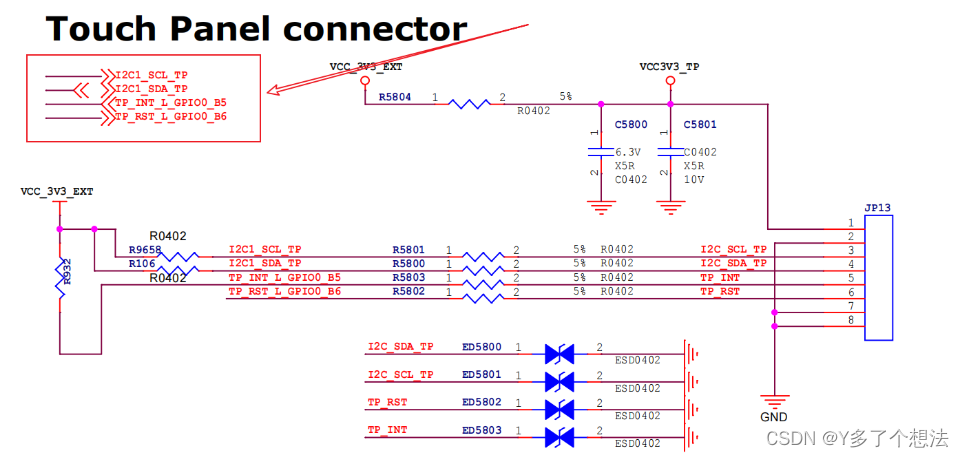
pmu6500通过I2C与CPU连接,使用I2C触摸的接口(VCC,GND,SCL,SDA,INT)。
&i2c1 {
status = "okay";
mpu6500_acc: mpu_acc@68 {
compatible = "mpu6500_acc";// 与mpu6500_acc.c定义匹配
reg = <0x68>;
irq-gpio = <&gpio0 RK_PB5 IRQ_TYPE_EDGE_RISING>;//中断脚
irq_enable = <0>;
poll_delay_ms = <30>;
type = <SENSOR_TYPE_ACCEL>;//传感器类型
layout = <5>;
};
mpu6500_gyro: mpu_gyro@68 {
compatible = "mpu6500_gyro";//与mpu6500_gyro.c定义匹配
reg = <0x68>;
poll_delay_ms = <30>;
type = <SENSOR_TYPE_GYROSCOPE>;//传感器类型
layout = <5>;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 139
139

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









