







主要内容如下:
1、Visdrone2019数据集介绍
2、实验结果
3、代码修改过程
服务器:NVIDIA TITAN RTX 24G
运行环境:Python=3.8(要求>=3.8),torch1.12.0+cu113(要求>=1.8)
原始数据集百度AI stduio下载链接:https://aistudio.baidu.com/datasetdetail/115729
Visdrone-YOLO格式数据集下载链接:https://aistudio.baidu.com/datasetdetail/295374
ultralytics官网:https://github.com/ultralytics/ultralytics
ultralytics版本:8.3.38
往期内容:
【超详细】跑通YOLOv8之深度学习环境配置1-Anaconda安装
【超详细】跑通YOLOv8之深度学习环境配置2-CUDA安装
【超详细】跑通YOLOv8之深度学习环境配置3-YOLOv8安装
【超详细】基于YOLOv8的PCB缺陷检测
【超详细】基于YOLOv8改进1-Drone-YOLO复现
【超详细】基于YOLOv8训练无人机视角Visdrone2019数据集
【超详细】基于ultralytics代码训练YOLOv5/8/9/10/11s—Visdrone2019数据集
1 数据集介绍
1.1 简介
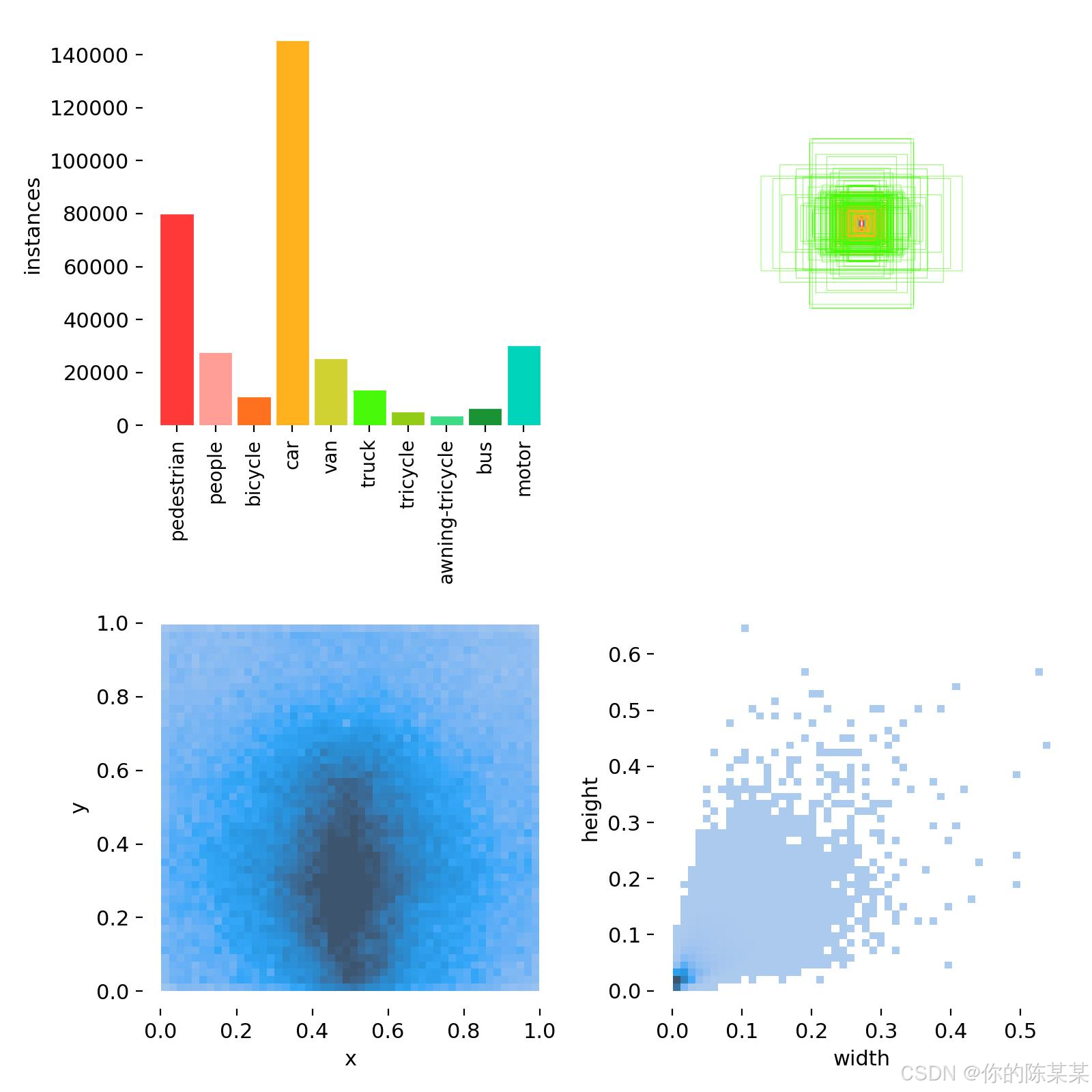
VisDrone数据集是由天津大学等团队开源的一个大型无人机视角的数据集,官方提供的数据中训练集是6471、验证集是548、测试集1610张。数据集共提供了以下12个类,分别是:‘忽略区域’, ‘pedestrian’, ‘people’, ‘bicycle’, ‘car’, ‘van’,‘truck’, ‘tricycle’, ‘awning-tricycle’, ‘bus’, ‘motor’, ‘others’,其中忽略区域、others是非有效目标区域,本项目中予以忽略;
1.2 数据集介绍和YOLO训练集制作
详情见文章1和2:https://blog.csdn.net/weixin_45679938/article/details/142439297
数据标签分布如下:
2 Visdrone2019数据集实验结果
训练参数:YOLOv8s,640*640,bacth_size=8,epoch=150,其余参数默认。
注意:实验只是粗略跑了一遍,可能存在精度偏差,如epoch=100时,Ciou在测试集map50只有0.324。

3 代码修改
3.1 新建ultralytics-main/ultralytics/utils/new_bbox_iou.py,内容如下:
import math
import numpy as np
import torch
from .ops import xyxy2xywh
def inner_iou(box1, box2, xywh=True, eps=1e-7, ratio=0.7):
if not xywh:
box1, box2 = xyxy2xywh(box1), xyxy2xywh(box2)
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
inner_b1_x1, inner_b1_x2, inner_b1_y1, inner_b1_y2 = x1 - (w1 * ratio) / 2, x1 + (w1 * ratio) / 2, y1 - (h1 * ratio) / 2, y1 + (h1 * ratio) / 2
inner_b2_x1, inner_b2_x2, inner_b2_y1, inner_b2_y2 = x2 - (w2 * ratio) / 2, x2 + (w2 * ratio) / 2, y2 - (h2 * ratio) / 2, y2 + (h2 * ratio) / 2
# Inner-IoU
inter = (inner_b1_x2.minimum(inner_b2_x2) - inner_b1_x1.maximum(inner_b2_x1)).clamp_(0) * \
(inner_b1_y2.minimum(inner_b2_y2) - inner_b1_y1.maximum(inner_b2_y1)).clamp_(0)
inner_union = w1 * h1 * ratio * ratio + w2 * h2 * ratio * ratio - inter + eps
return inter / inner_union
class WIoU_Scale:
''' monotonous: {
None: origin v1
True: monotonic FM v2
False: non-monotonic FM v3
}
momentum: The momentum of running mean'''
iou_mean = 1.
monotonous = False
_momentum = 1 - 0.5 ** (1 / 7000)
_is_train = True
def __init__(self, iou):
self.iou = iou
self._update(self)
@classmethod
def _update(cls, self):
if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \
cls._momentum * self.iou.detach().mean().item()
@classmethod
def _scaled_loss(cls, self, gamma=1.9, delta=3):
if isinstance(self.monotonous, bool):
if self.monotonous:
return (self.iou.detach() / self.iou_mean).sqrt()
else:
beta = self.iou.detach() / self.iou_mean
alpha = delta * torch.pow(gamma, beta - delta)
return beta / alpha
return 1
def new_bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False,
MPDIoU=False, ShapeIou=False, PIouV1=False, PIouV2=False, UIoU=False, Inner_iou=False,
Focal=False, alpha=1, gamma=0.5, scale=False, eps=1e-7,
feat_w=640, feat_h=640, ratio=0.7, ShapeIou_scale=0, PIou_Lambda=1.3, epoch=300):
"""
计算bboxes iou
Args:
box1: predict bboxes
box2: target bboxes
xywh: 将bboxes转换为xyxy的形式
GIoU: 为True时计算GIoU LOSS (yolov8自带)
DIoU: 为True时计算DIoU LOSS (yolov8自带)
CIoU: 为True时计算CIoU LOSS (yolov8自带,默认使用)
SIoU: 为True时计算SIoU LOSS (新增)
EIoU: 为True时计算EIoU LOSS (新增)
WIoU: 为True时计算WIoU LOSS (新增)
MPDIoU: 为True时计算MPDIoU LOSS (新增)
ShapeIou: 为True时计算ShapeIou LOSS (新增)
PIouV1/V2: 为True时计算Powerful-IoU LOSS (新增)
UIoU: 为True时计算Unified-IoU LOSS (新增)
Inner_iou: 为True时计算InnerIou LOSS (新增)
Focal: 对IOU损失乘以系数=IOU**gamma,以使回归过程专注于高质量锚框,参考Focal-EIoU Loss
alpha: AlphaIoU中的alpha参数,默认为1,为1时则为普通的IoU,如果想采用AlphaIoU,论文alpha默认值为3,此时设置CIoU=True则为AlphaCIoU
gamma: Focal-EIoU中指数系数
scale: scale为True时,WIoU会乘以一个系数
eps: 防止除0
feat_w/h: 特征图大小
ratio: Inner-IoU对应的是尺度因子,通常取范围为[0.5,1.5],原文中VOC数据集对应的Inner-CIoU和Inner-SIoU设置在[0.7,0.8]之间有较大提升,
数据集中大目标多则设置<1,小目标多设置>1
ShapeIou_scale: 为ShapeIou的缩放因子,与数据集中目标的大小相关
PIou_Lambda: 为Powerful-IoU的超参数
epoch: 为Unified-IoU的超参数,训练轮数
Returns:
iou
"""
# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
if UIoU:
# Unified-IoU https://arxiv.org/pdf/2408.06636
# define the center point for scaling
bb1_xc = x1
bb1_yc = y1
bb2_xc = x2
bb2_yc = y2
# attenuation mode of hyperparameter "u_ratio"[原链接为ratio]
linear = True
cosine = False
fraction = False
# assuming that the total training epochs are 300, the "u_ratio" changes from 2 to 0.5
if linear:
u_ratio = -0.005 * epoch + 2
elif cosine:
u_ratio = 0.75 * math.cos(math.pi * epoch / 300) + 1.25
elif fraction:
u_ratio = 200 / (epoch + 100)
else:
u_ratio = 0.5
ww1, hh1, ww2, hh2 = w1 * u_ratio, h1 * u_ratio, w2 * u_ratio, h2 * u_ratio
bb1_x1, bb1_x2, bb1_y1, bb1_y2 = bb1_xc - (ww1 / 2), bb1_xc + (ww1 / 2), bb1_yc - (hh1 / 2), bb1_yc + (hh1 / 2)
bb2_x1, bb2_x2, bb2_y1, bb2_y2 = bb2_xc - (ww2 / 2), bb2_xc + (ww2 / 2), bb2_yc - (hh2 / 2), bb2_yc + (hh2 / 2)
# assign the value back to facilitate subsequent calls
w1, h1, w2, h2 = ww1, hh1, ww2, hh2
b1_x1, b1_x2, b1_y1, b1_y2 = bb1_x1, bb1_x2, bb1_y1, bb1_y2
b2_x1, b2_x2, b2_y1, b2_y2 = bb2_x1, bb2_x2, bb2_y1, bb2_y2
CIoU = True
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
if scale:
self = WIoU_Scale(1 - (inter / union))
# IoU
# iou = inter / union # ori iou
iou = torch.pow(inter/(union + eps), alpha) # alpha iou https://arxiv.org/abs/2110.13675
if CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squared
rho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha_ciou = v / (v - iou + (1 + eps))
if Inner_iou and alpha == 1:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter/(union + eps), gamma) # Focal_CIoU
else:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
elif EIoU:
rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2
rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2
cw2 = torch.pow(cw ** 2 + eps, alpha)
ch2 = torch.pow(ch ** 2 + eps, alpha)
if Inner_iou and alpha == 1:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter/(union + eps), gamma) # Focal_EIou
else:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIou
elif SIoU:
# SIoU Loss https://arxiv.org/pdf/2205.12740.pdf
s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + eps
s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + eps
sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)
sin_alpha_1 = torch.abs(s_cw) / sigma
sin_alpha_2 = torch.abs(s_ch) / sigma
threshold = pow(2, 0.5) / 2
sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)
angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)
rho_x = (s_cw / cw) ** 2
rho_y = (s_ch / ch) ** 2
gamma = angle_cost - 2
distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)
omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)
omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
if Inner_iou and alpha == 1:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_SIou
else:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIou
elif WIoU and alpha == 1:
if Inner_iou:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
raise RuntimeError("WIoU do not support Focal.")
elif scale:
return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp((rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051
else:
return iou, torch.exp((rho2 / c2)) # WIoU v1
if Inner_iou and alpha == 1:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
return iou - rho2 / c2, torch.pow(inter/(union + eps), gamma) # Focal_DIoU
else:
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
if Inner_iou and alpha == 1:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdf
else:
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdf
elif MPDIoU and alpha == 1:
# MPDIoU https://arxiv.org/pdf/2307.07662v1
sq_sum = (feat_w ** 2) + (feat_h ** 2) # 对应输入image的宽高
d12 = (b2_x1 - b1_x1) ** 2 + (b2_y1 - b1_y1) ** 2
d22 = (b2_x2 - b1_x2) ** 2 + (b2_y2 - b1_y2) ** 2
if Inner_iou:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
raise RuntimeError("MPDIoU do not support Focal.")
return iou - (d12 / sq_sum) - (d22 / sq_sum)
elif ShapeIou and alpha == 1:
# ShapeIou https://arxiv.org/pdf/2312.17663
ww = 2 * torch.pow(w2, ShapeIou_scale) / (torch.pow(w2, ShapeIou_scale) + torch.pow(h2, ShapeIou_scale))
hh = 2 * torch.pow(h2, ShapeIou_scale) / (torch.pow(w2, ShapeIou_scale) + torch.pow(h2, ShapeIou_scale))
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
center_distance_x = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2) / 4
center_distance_y = ((b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4
center_distance = hh * center_distance_x + ww * center_distance_y
distance = center_distance / c2
omiga_w = hh * torch.abs(w1 - w2) / torch.max(w1, w2)
omiga_h = ww * torch.abs(h1 - h2) / torch.max(h1, h2)
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
if Inner_iou:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
raise RuntimeError("ShapeIou do not support Focal.")
return iou - distance - 0.5 * ( shape_cost)
elif (PIouV1 or PIouV2) and alpha == 1:
# Powerful-IoU https://www.sciencedirect.com/science/article/abs/pii/S0893608023006640
dw1 = torch.abs(b1_x2.minimum(b1_x1) - b2_x2.minimum(b2_x1))
dw2 = torch.abs(b1_x2.maximum(b1_x1) - b2_x2.maximum(b2_x1))
dh1 = torch.abs(b1_y2.minimum(b1_y1) - b2_y2.minimum(b2_y1))
dh2 = torch.abs(b1_y2.maximum(b1_y1) - b2_y2.maximum(b2_y1))
P = ((dw1 + dw2) / torch.abs(w2) + (dh1 + dh2) / torch.abs(h2)) / 4
L_v1 = 1 - iou - torch.exp(-P ** 2) + 1
if Focal:
raise RuntimeError("PIou do not support Focal.")
if PIouV1:
return L_v1
if PIouV2:
q = torch.exp(-P)
x = q * PIou_Lambda
return 3 * x * torch.exp(-x ** 2) * L_v1
if Inner_iou and alpha == 1:
iou = inner_iou(box1, box2, xywh=xywh, ratio=ratio)
if Focal:
return iou, torch.pow(inter/(union + eps), gamma) # Focal_IoU
else:
return iou # IoU
3.2 ultralytics-main/ultralytics/utils/loss.py修改,内容如下:
步骤一:新增导入库
from .new_bbox_iou import new_bbox_iou
步骤二:BboxLoss类修改,直接整个类替换,内容如下:
class BboxLoss(nn.Module):
"""Criterion class for computing training losses during training."""
def __init__(self, reg_max=16, imgsz=640, iou_type='Ciou', Inner_iou=False, Focal=False, Focaler=False, epoch=300, alpha=1):
"""Initialize the BboxLoss module with regularization maximum and DFL settings."""
super().__init__()
self.dfl_loss = DFLoss(reg_max) if reg_max > 1 else None
self.iou_type = iou_type # +++
self.Inner_iou = Inner_iou # Inner-IoU
self.Focal = Focal # Focal-IoU
self.imgsz = imgsz # MPDIoU
self.Focaler = Focaler # Focaler-IoU
self.epoch = epoch # Unified-IoU
self.alpha = alpha # AlphaIoU
def forward(self, pred_dist, pred_bboxes, anchor_points, target_bboxes, target_scores, target_scores_sum, fg_mask):
"""IoU loss."""
weight = target_scores.sum(-1)[fg_mask].unsqueeze(-1)
if self.iou_type == "iou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, Inner_iou=self.Inner_iou, Focal=self.Focal, alpha=self.alpha)
elif self.iou_type == "Giou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, GIoU=True, Inner_iou=self.Inner_iou, Focal=self.Focal, alpha=self.alpha)
elif self.iou_type == "Diou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, DIoU=True, Inner_iou=self.Inner_iou, Focal=self.Focal, alpha=self.alpha)
elif self.iou_type == "Siou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, SIoU=True, Inner_iou=self.Inner_iou, Focal=self.Focal, alpha=self.alpha)
elif self.iou_type == "Eiou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, EIoU=True, Inner_iou=self.Inner_iou, Focal=self.Focal, alpha=self.alpha)
elif self.iou_type == "Wise-iou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, WIoU=True, Inner_iou=self.Inner_iou, scale=True)
elif self.iou_type == "MPDiou":
# 仅针对正方形image输入
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, MPDIoU=True, Inner_iou=self.Inner_iou, feat_w=self.imgsz, feat_h=self.imgsz)
elif self.iou_type == "Shape-iou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, ShapeIou=True, Inner_iou=self.Inner_iou, ShapeIou_scale=0)
elif self.iou_type == "Powerful-iou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, PIouV1=True, PIouV2=False, PIou_Lambda=1.3)
elif self.iou_type == "Unified-iou":
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=True, UIoU=True, epoch=self.epoch)
else:
# 默认Ciou
iou = new_bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True, Inner_iou=self.Inner_iou, Focal=self.Focal, alpha=self.alpha)
if type(iou) is tuple:
if len(iou) == 2:
loss_iou = ((1.0 - iou[0]) * iou[1].detach() * weight).sum() / target_scores_sum
else:
loss_iou = (iou[0] * iou[1] * weight).sum() / target_scores_sum
elif self.iou_type == "Powerful-iou":
# 已在new_bbox_iou求得1-iou
loss_iou = (iou * weight).sum() / target_scores_sum
else:
if self.Focaler:
# 引入 Focaler-IoU 回归样本 https://arxiv.org/abs/2401.10525
# default d=0.00,u=0.95
d = 0.00
u = 0.95
iou = ((iou - d) / (u - d)).clamp(0, 1)
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum
# DFL loss
if self.dfl_loss:
target_ltrb = bbox2dist(anchor_points, target_bboxes, self.dfl_loss.reg_max - 1)
loss_dfl = self.dfl_loss(pred_dist[fg_mask].view(-1, self.dfl_loss.reg_max), target_ltrb[fg_mask]) * weight
loss_dfl = loss_dfl.sum() / target_scores_sum
else:
loss_dfl = torch.tensor(0.0).to(pred_dist.device)
return loss_iou, loss_dfl
步骤三:v8DetectionLoss类中实例化BboxLoss类参数补充,替换即可内容如下:
# self.bbox_loss = BboxLoss(m.reg_max).to(device)
self.bbox_loss = BboxLoss(m.reg_max, self.hyp.imgsz, self.hyp.iou_type, self.hyp.Inner_iou, self.hyp.Focal, self.hyp.Focaler, self.hyp.epochs, self.hyp.alpha).to(device)
3.3 ultralytics-main/ultralytics/cfg/default.yaml超参数文件末尾追加参数,便于灵活调用,追加的参数如下:
# IOUloss settings ------------------------------------------------------------------------------------------------------
iou_type: Ciou # 支持iou/Giou/Diou/Ciou/Siou/Eiou/Wise-iou/MPDiou/Shape-iou/Powerful-iou/Unified-iou
Inner_iou: False # 仅支持iou/Giou/Diou/Ciou/Siou/Eiou/Wise-iou/MPDiou/Shape-iou/Unified-iou, 不与alpha系列共用
Focal: False # 仅支持iou/Giou/Diou/Ciou/Siou/Eiou/Unified-iou
Focaler: False # 仅支持iou/Giou/Diou/Ciou/Siou/Eiou//MPDiou/Shape-iou/Unified-iou
alpha: 1 # 仅支持iou/Giou/Diou/Ciou/Siou/Eiou, 不与Inner_iou系列共用, 默认值为1
3.4 利用脚本训练,新建ultralytics-main/train_v8.py,内容如下:
注意:使用yolo命令训练,需对修改后的整个代码运行pip install -e .
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
from ultralytics import YOLO
# Load a model
model = YOLO("yolov8s.yaml") # build a new model from scratch
model.load('yolov8s.pt')
# Use the model
# 默认Ciou
model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10)
# # Siou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="Siou", Inner_iou=False, Focal=False, Focaler=False)
# # Eiou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="Eiou", Inner_iou=False, Focal=False, Focaler=False)
# # AlphaIoU,设置alpha即可, 仅支持iou/giou/diou/ciou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="iou", alpha=3)
# # Wise-iou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="Wise-iou", Inner_iou=False)
# # MPDiou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="MPDiou", Inner_iou=False, Focaler=False)
# # Shape-iou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="Shape-iou", Inner_iou=False, Focaler=False)
# # Powerful-iou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="Powerful-iou")
# # Unified-iou
# model.train(data=r"/home/ubuntu/work/ct/datasets/minidatasets/VisDrone.yaml",
# imgsz=640, epochs=1, workers=4, batch=8, close_mosaic=10,
# iou_type="Unified-iou", Inner_iou=False, Focaler=False)
metrics = model.val() # evaluate model performance on the validation set
path = model.export(format="onnx", dynamic=True) # export the mode l to ONNX format


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









