






主要内容如下:
一、论文解析
二、基于DEIM-D-FINE-S训练Visdrone2019无人机数据集
1、Visdrone2019数据集介绍
2、模型训练、验证及测试
3、onnx导出与测试
4、与YOLOv8\11进行结果对比
服务器:NVIDIA RTX4090 24G
运行环境:Python=3.8(要求>=3.8),torch2.3.1+cu121(要求>=2.0.1)
Visdrone2019-COCO格式数据集百度AI stduio下载链接:https://aistudio.baidu.com/datasetdetail/226107/0
Visdrone-YOLO格式数据集下载链接:https://aistudio.baidu.com/datasetdetail/295374
arXiv: https://arxiv.org/abs/2412.04234
Project webpage:https://www.shihuahuang.cn/DEIM/
GitHub:https://github.com/ShihuaHuang95/DEIM
训练和使用结果:
(1)map50高于YOLOv8将近6个点达47%,训练显存占用较大,batchsize为8需要20G,训练速度比YOLOv8慢一倍,12小时左右;
(2)onnx推理速度要慢于YOLOv8,需要9-10ms;
(3)检出率比较高,但是误检和同一个目标出现两个重叠框但不同类别现象较多。
一、论文解析
DEIM(DETR with Improved Matching for Fast Convergence)是一篇关于加速基于Transformer架构(DETR)的实时目标检测的训练框架的论文。以下是该论文的详细解析:
1 研究背景
目标检测是计算机视觉中的一个基本任务,广泛应用于自动驾驶、机器人导航等领域。实时目标检测要求模型不仅能精准检测目标,还要以极低的延迟运行。DETR(Detection Transformer)是一种基于Transformer的端到端目标检测框架,通过使用匈牙利算法进行一对一(O2O)匹配,消除了对手工设计的非极大值抑制(NMS)的需求,但其收敛速度慢成为一大挑战。
2 研究问题
DETR模型在训练过程中存在慢收敛的问题,主要原因是其一对一(O2O)匹配机制导致正样本数量稀少,且存在大量低质量匹配。这限制了模型的有效学习,尤其是对小目标的检测。
3 解决方案
为了解决上述问题,DEIM提出了以下两个主要策略:
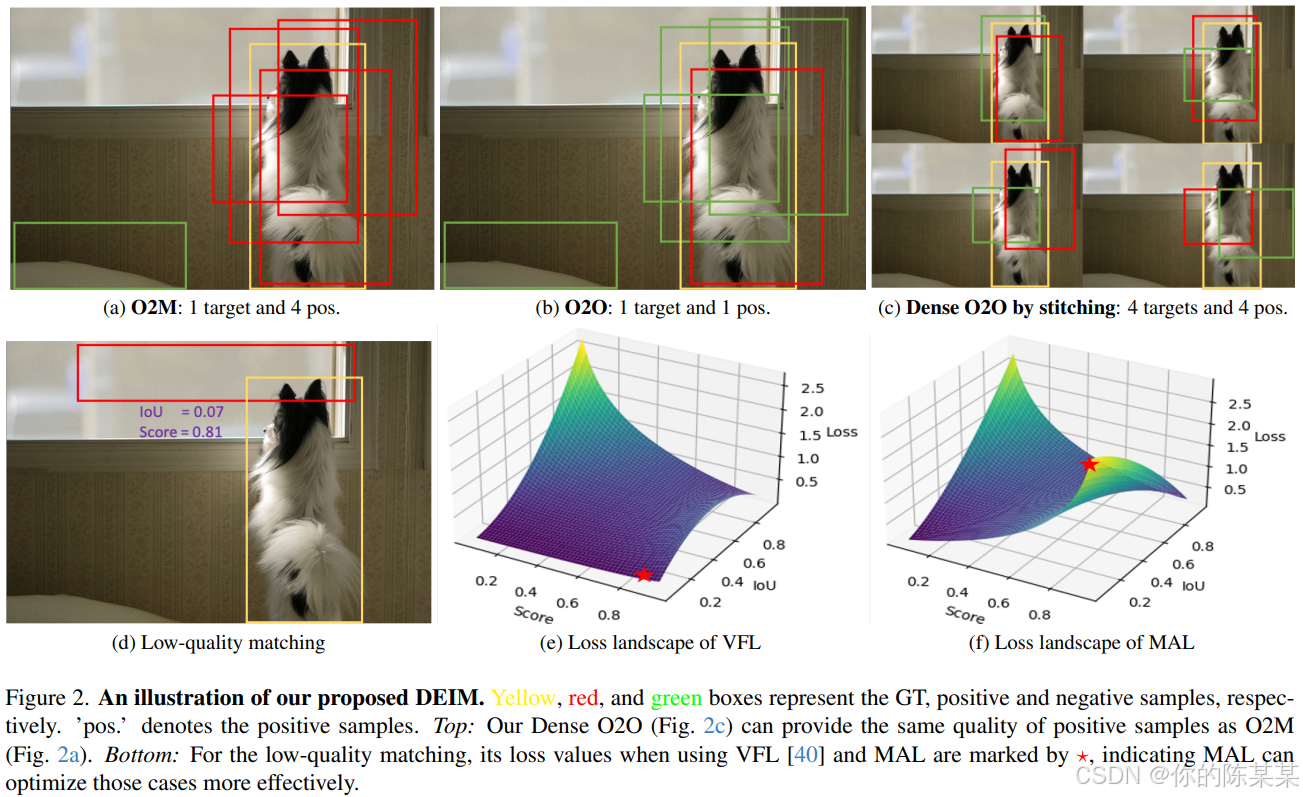
密集O2O匹配(Dense O2O):
通过增加每张图像中的目标数量,生成更多的正样本,从而提供更密集的监督信号,加速模型收敛。
这可以通过经典的数据增强技术(如马赛克和混合)轻松实现,这些技术在保持一对一匹配框架的同时,每张图像生成额外的正样本。
匹配感知损失(MAL, Matchability-Aware Loss):
一种新的损失函数,优化不同质量级别的匹配,特别是低质量匹配,提升模型性能。
MAL通过将匹配查询与目标之间的IoU(交并比)与分类置信度结合,根据匹配质量调整惩罚。
相比传统的Varifocal Loss(VFL),MAL在处理低质量匹配时更有效,特别是在训练的早期阶段。
4 实验验证
在COCO数据集上的实验表明,DEIM显著加速了DETR模型的收敛,减少了50%的训练时间,同时提升了检测精度。与现有的实时检测器(如YOLO系列和RT-DETR)相比,DEIM在性能和训练效率上均表现出色,尤其是在小目标检测方面有显著提升。
当与RT-DETR和D-FINE集成时,DEIM在减少训练时间的同时提高了性能。
特别是与RT-DETRv2集成时,DEIM在NVIDIA 4090 GPU上单天训练就达到了53.2%的平均精度(AP)。

DEIM训练的实时模型在没有额外数据的情况下,超越了领先的实时目标检测器。例如,DEIM-D-FINE-L和DEIM-D-FINE-X在NVIDIA T4 GPU上分别以124 FPS和78 FPS的速度达到了54.7%和56.5%的AP。


5 结论
DEIM通过密集O2O匹配和匹配感知损失,有效解决了DETR模型的慢收敛问题,提升了实时目标检测的性能,为该领域设定了新的基准。DEIM通过增加正样本数量和优化低质量匹配,显著提升了DETR模型的训练效率和检测性能。
二、基于DEIM-D-FINE-S训练Visdrone2019无人机数据集
1 环境安装
步骤1:创建环境
conda create -n deim python=3.8.13
步骤2:安装torch
版本:要求大于2.0.1,这里安装2.3.1
# CUDA 11.8
conda install pytorch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 pytorch-cuda=11.8 -c pytorch -c nvidia
# CUDA 12.1
conda install pytorch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 pytorch-cuda=12.1 -c pytorch -c nvidia
# CPU Only
conda install pytorch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 cpuonly -c pytorch
步骤3:安装deim其他依赖
注意:calflops安装或训练报错可见文末尾。
conda activate deim
pip install -r requirements.txt
2 Visdrone2019数据集准备
2.1 简介
VisDrone数据集是由天津大学等团队开源的一个大型无人机视角的数据集,官方提供的数据中训练集是6471、验证集是548、测试集1610张。数据集共提供了以下12个类,分别是:‘忽略区域’, ‘pedestrian’, ‘people’, ‘bicycle’, ‘car’, ‘van’,‘truck’, ‘tricycle’, ‘awning-tricycle’, ‘bus’, ‘motor’, ‘others’,其中忽略区域、others是非有效目标区域,本项目中予以忽略,只使用’pedestrian’, ‘people’, ‘bicycle’, ‘car’, ‘van’,‘truck’, ‘tricycle’, ‘awning-tricycle’, ‘bus’, 'motor’10个类;
2.2 数据集制作
注意:这里直接下载已处理好的coco格式的Visdrone2019数据集进行训练,同时注意该数据集图片命名已改变,但其他无影响。
下载链接:Vidrone2019-COCO格式数据集
3 配置文件修改
3.1 数据集配置文件修改
新建DEIM-main/configs/dataset/custom_xulvisdrone.yml文件,内容如下:
注意修改项:类别num_classes、训练集图像路径img_folder、训练集coco标签ann_file、验证集图像路径img_folder、验证集coco标签ann_file四项。
另外,验证测试集精度修改验证集图像路径img_folder、验证集coco标签ann_file两项即可。
task: detection
evaluator:
type: CocoEvaluator
iou_types: ['bbox', ]
num_classes: 10 # your dataset classes
remap_mscoco_category: False
train_dataloader:
type: DataLoader
dataset:
type: CocoDetection
img_folder: DEIM-main/visdrone2019_coco/train2017
ann_file: DEIM-main/visdrone2019_coco/annotations/instances_train2017.json
return_masks: False
transforms:
type: Compose
ops: ~
shuffle: True
num_workers: 4
drop_last: True
collate_fn:
type: BatchImageCollateFunction
val_dataloader:
type: DataLoader
dataset:
type: CocoDetection
img_folder: DEIM-main/visdrone2019_coco/val2017
ann_file: DEIM-main/visdrone2019_coco/annotations/instances_val2017.json
return_masks: False
transforms:
type: Compose
ops: ~
shuffle: False
num_workers: 4
drop_last: False
collate_fn:
type: BatchImageCollateFunction
3.2 训练过程配置参数修改
注意:这边训练configs/deim_dfine/deim_hgnetv2_s_coco.yml,它是层层调用其他配置文件,优先采用configs/deim_dfine/dfine_hgnetv2_s_coco.yml和configs/base/deim.yml内容。

所有具体步骤如下:【默认640训练只需修改步骤二和步骤四】
步骤一:保存路径+epoch设置
configs/deim_dfine/deim_hgnetv2_s_coco.yml修改epoch和保存路径等参数,默认132epoch;

步骤二:设置自定义数据集
configs/deim_dfine/dfine_hgnetv2_s_coco.yml修改自定义数据集文件调用,如下:

步骤三:训练尺寸
configs/base/deim.yml修改训练尺寸,默认640,Mosaic尺寸设置【切成4块】:

步骤四:batch_size设置
configs/base/dataloader.yml修改total_batch_size【由原先32改为8】,640*640大概需要20G显存。

4 模型训练
这里仅训练deim_dfine-s模型,模型输入尺寸640*640,训练132轮,且利用官网coco预训练权重进行微调!

训练命令如下:
# deim_dfine_hgnetv2_s_coco_120e.pth为coco预训练权重
python train.py -c configs/deim_dfine/deim_hgnetv2_s_coco.yml --use-amp --seed=0 -t deim_dfine_hgnetv2_s_coco_120e.pth
训练中,可利用tensorboard --logdir=outputs/deim_hgnetv2_s_coco/summary终端运行可视化训练过程,summary中包含一个events.out.tfevents.xxx文件。将下面的网页用谷歌浏览器打开,如果没有内容大概率是路径错误。

可视化结果如下:

5 模型验证
对数据集进行验证的命令依然是train.py,启用–test-only参数仅验证不训练。
验证的命令如下:
# best_stg2.pth为训练132轮最佳map50:95的精度权重
python train.py -c configs/deim_dfine/deim_hgnetv2_s_coco.yml --test-only -r outputs/deim_hgnetv2_s_coco/best_stg2.pth
5.1 maxDets=100验证
Visdrone数据集验证结果如下【maxDets=100】,map50=0.474:

Visdrone数据集测试集结果如下【maxDets=100】,map50=0.396:

5.2 maxDets=300验证
maxDets:该指标的意思是分别保留测试集的每张图上置信度排名第1、前10、前100个预测框,根据这些预测框和真实框进行比对,来计算AP、AR等值。但是,在WidePerson等密集目标数据集中,尽管绝大部分图片中目标的数量在100以内,但却存在某些图片中包含近200个目标,那么我们再使用maxDets=100就不符合要求了,因此改成300进行验证测试。
修改:前往环境中faster_coco_eva依赖包进行修改,改一行即可:
anaconda3/envs/yolov7/lib/python3.8/site-packages/faster_coco_eval/core/cocoeval.py

Visdrone数据集验证结果如下【maxDets=300】,map50=0.475:

Visdrone数据集测试集结果如下【maxDets=300】,map50=0.397:

6 模型测试
测试的命令如下:
python tools/inference/torch_inf.py -c configs/deim_dfine/deim_hgnetv2_s_coco.yml -r outputs/deim_hgnetv2_s_coco/best_stg2.pth --input visdrone2019_coco/images/test/0000006_00159_d_0000001.jpg --device cuda:0
注意:原代码不带类别,只有索引,可自己在绘图时自行加入!
结果可视化如下,置信度阈值0.4:

7 onnx推理与可视化
注意:需安装onnx和onnxruntime等.
pip install onnx==1.14.1 -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install onnxruntime-gpu==1.18.1 -i https://pypi.tuna.tsinghua.edu.cn/simple
7.1 导出onnx
python tools/deployment/export_onnx.py -c configs/deim_dfine/deim_hgnetv2_s_coco.yml -r outputs/deim_hgnetv2_s_coco/best_stg2.pth
利用netron打开,显示如下:

7.2 运行官方的onnx推理脚本
注意:结果与pth存在偏差,可能是预处理影响。
python tools/inference/onnx_inf.py --onnx outputs/deim_hgnetv2_s_coco/best_stg2.onnx --input visdrone2019_coco/images/test/0000006_00159_d_0000001.jpg
可视化如下:onnx(左)、pth(右)

7.3 运行自定义onnx推理脚本
注意:该脚本无torch,只包含numpy、opencv和onnxruntime三个依赖。
推理速度如下:

8 与YOLOv8\11结果比较
Visdrone2019实验结果对比如下:

9 报错信息
报错1:RuntimeError: CUDA error: device-side assert triggered
原因:数据集配置有误,导致类别id与yaml文件中的索引号匹配不上导致的,这边自定义数据集要求ID索引从0开始,如10个类,则对应0-9。
报错2:Could not load library 2 libcudnn cnn train.so.8. Error. /usr/local/cuda-12.1/lib64/ibcudnn cnn train.so.8: undefined symbol
原因:安装calflops会携带装nvidia-cudnn-cu12,而环境nvidia-cudnn-cu12容易与系统的cudnn冲突导致报错。所以要么把系统里面的cudnn去掉(不推荐,如果部署其他的如Tensor t时会出现问题,反而更麻烦)。要么把虚拟环境中的cudnn去掉(推荐),如pip uninstall nvidia-cudnn-cu12。
报错3:ModuleNotFoundError: No module named ‘calflops’
原因:与报错2冲突,因此我们将engine/misc/profiler_utils.py相关内容注释,该calflops仅计算FLOPs等功能。



















 1955
1955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









