







目录
3. 高精度彩色2D线扫+激光3D线扫一体成像最新技术-Ranger3-80
一、激光3D线扫成像原理
1. SICK 3D视觉的主要原理是激光三角测量法(Laser triangulation)
2. 激光光源投射到物体的表面,相机的镜头和激光成一定的角度,生成物体表面的轮廓线
3. 物体轮廓在激光线处通过,生成多条物体表面的轮廓线,相机将轮廓线组成一幅3D图像
4. 3D成像需要扫描物体表面,因此物体与相机必须发生相对位移
结构示意图如下: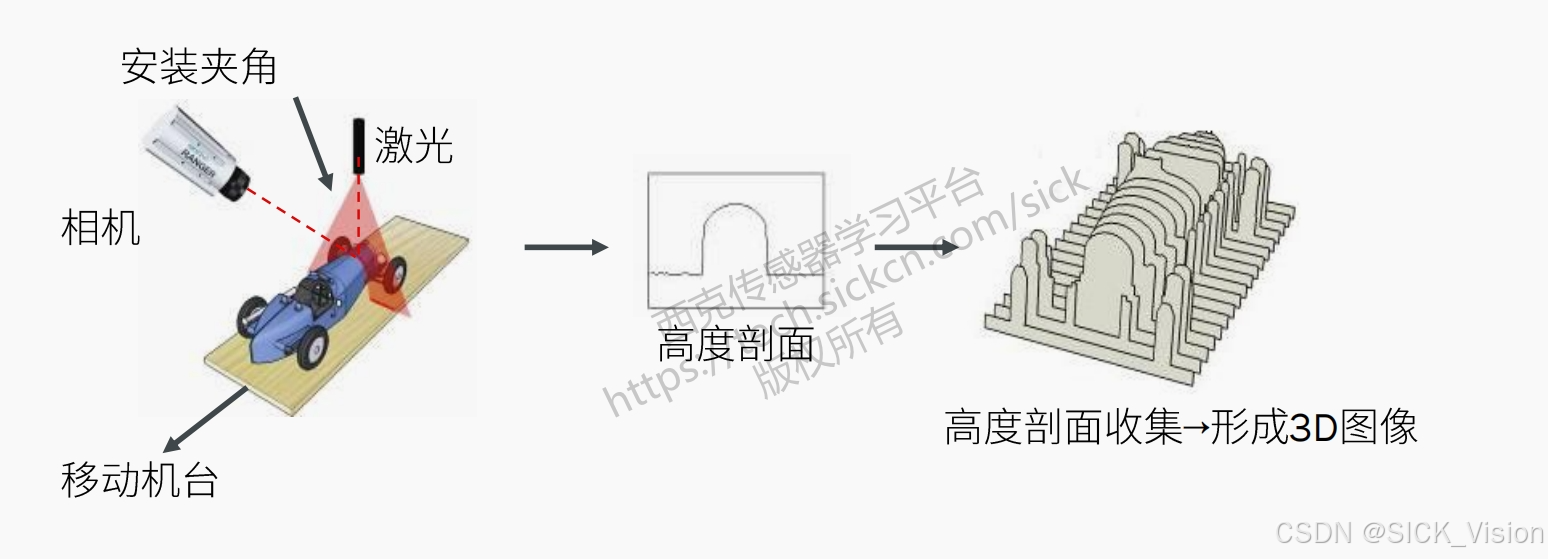
二、系统架构
1.分体式架构
分体式相机需要搭配激光器进行使用,其中常见的激光器等级有2M和3B: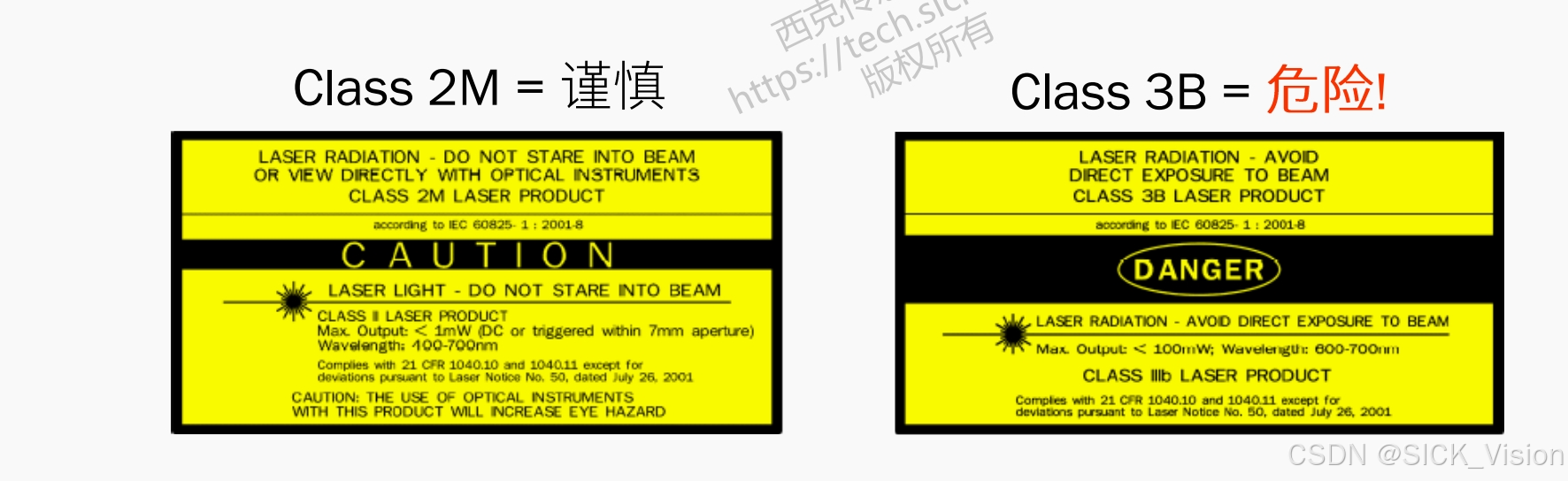
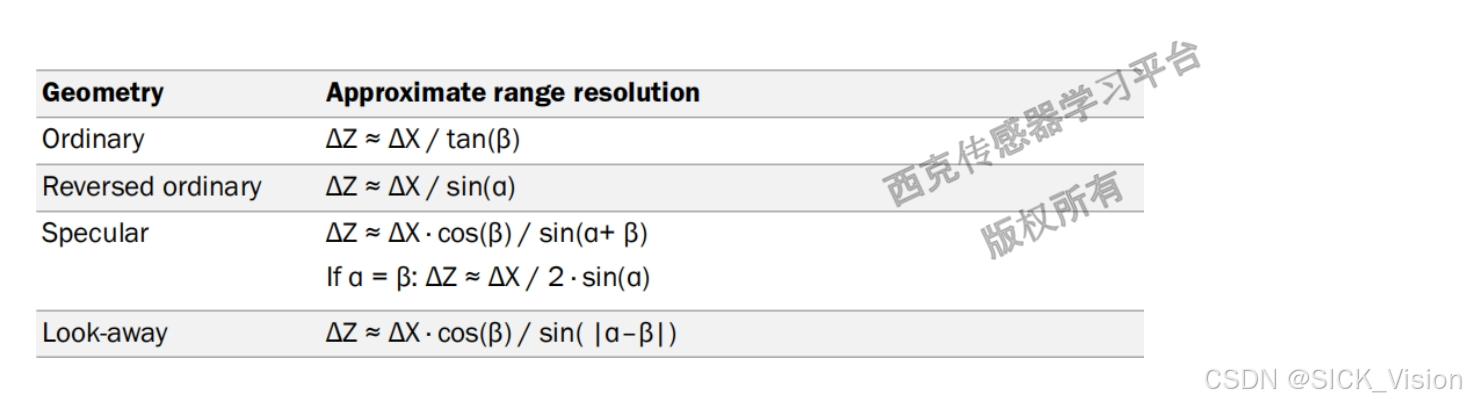
2. 架设方式
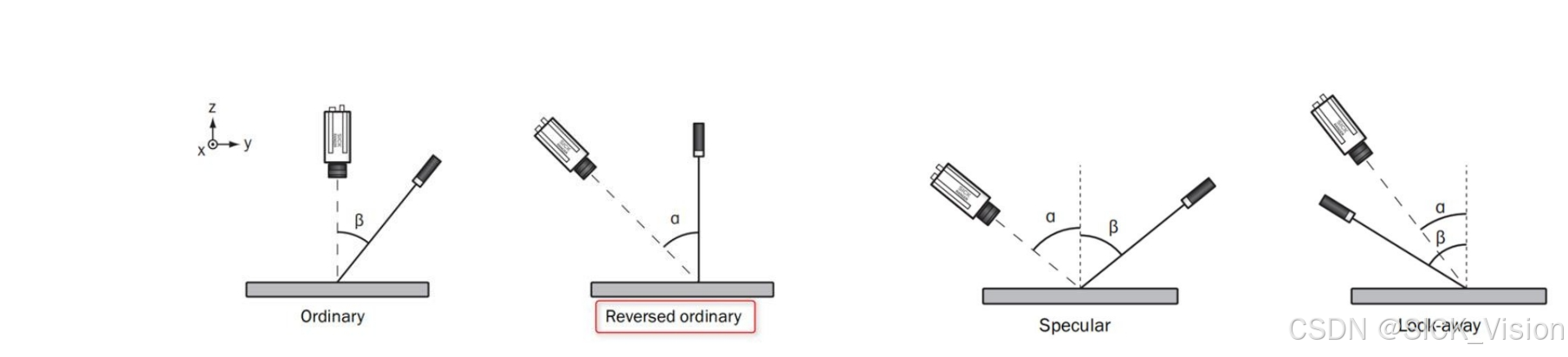
- Ordinary:布置安装简单,计算结果的应用非常直观,是目前最常用,也是一种通用的结构形式;
- Reversed Ordinary:布置安装简单,计算结果的应用不够直观,多用于对精度要求高的平面物体的特征测量;
- Specular:布置安装复杂,计算结果的应用不够直观,多用于反射特性较弱的深色物体的表面测量
- Look-away:多用于高反光件,比较少见 (因为直射式和斜射式,通过俯仰一定的角度,也可达到类似的效果)
3.确定分辨率
线激光3D相机的平均分辨率,可分为三个方向:
-
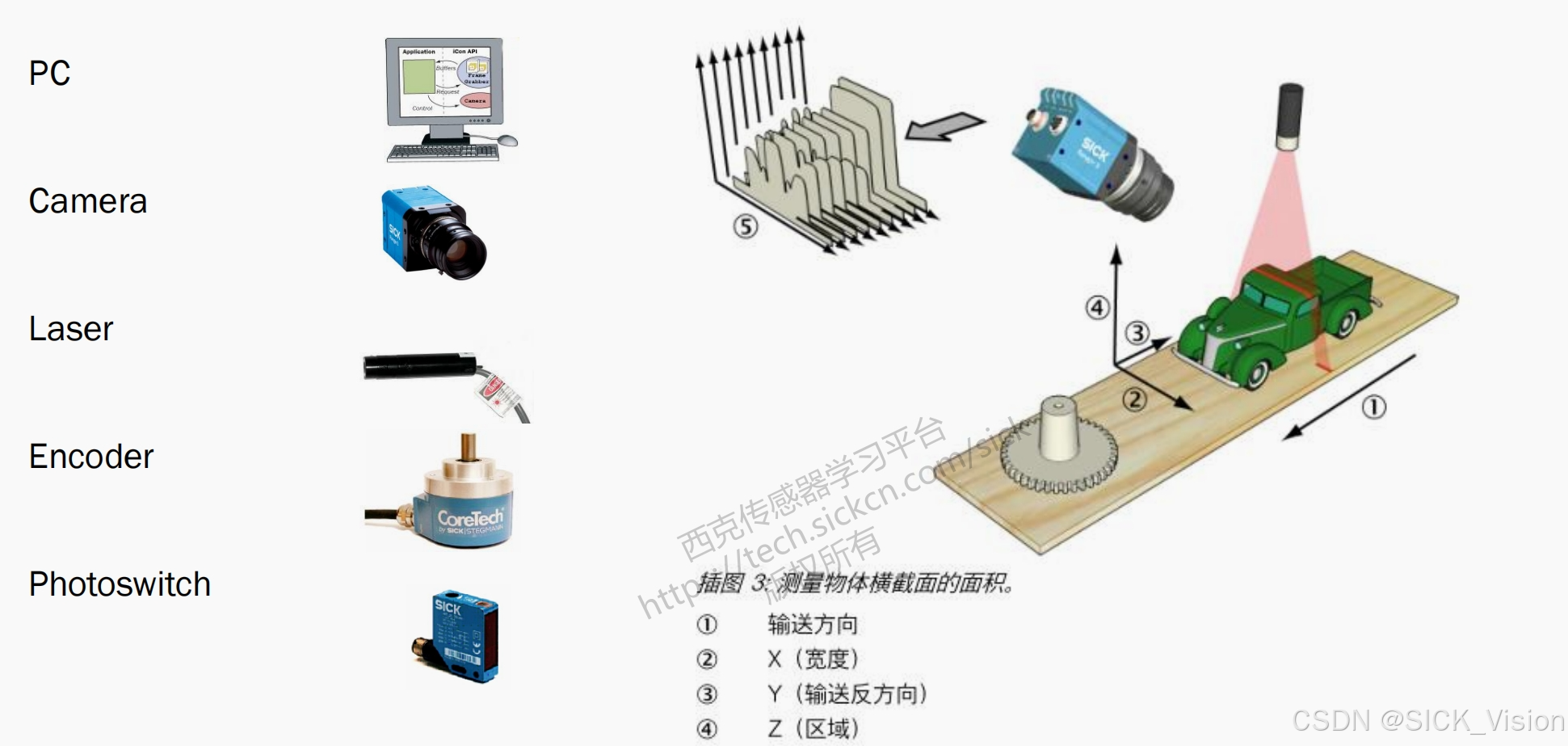
1.x轴与运动方向(y轴)正交
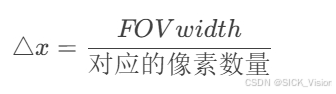
-
2.运动方向(y轴)

-
3.深度方向(z轴)
受限于系统光学放大率,相机光轴和激光平面夹角,以及激光线中心提取算法的亚像素精度。
-
4. 阴影与盲区
相机光轴与激光平面的夹角 α 影响z向分辨率和盲区
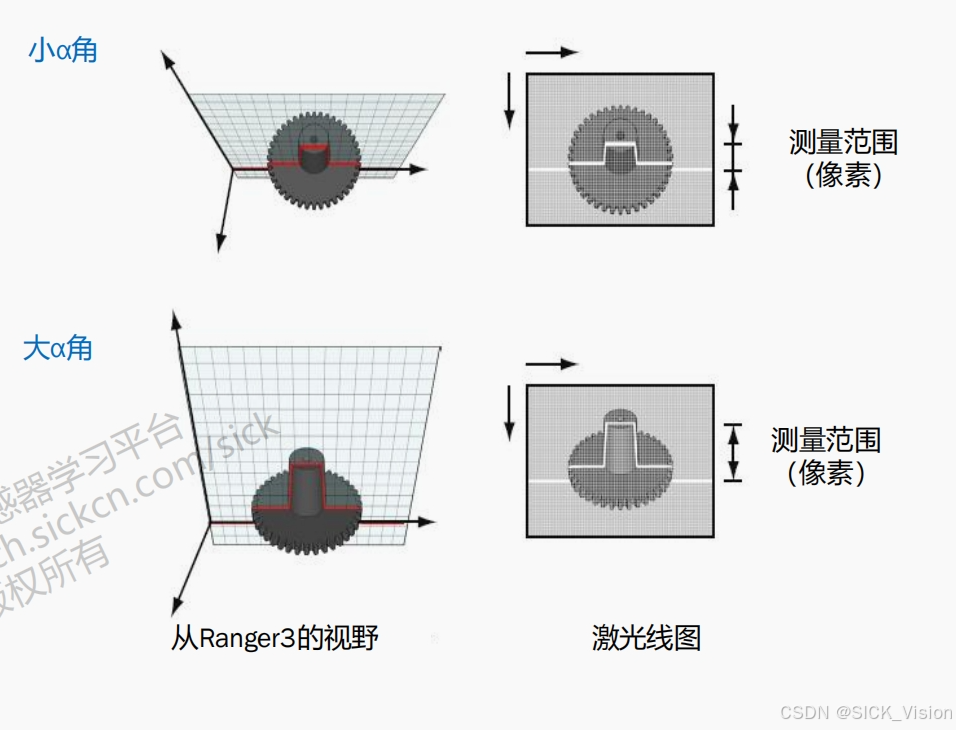
总结: α角越大,相同的测量范内,像素越多,z向分辨率越高,盲区(相机接收不到反射光线的区域)越大。激光器垂直于物体表面时(Reversed Ordinary),阴影最小(激光器照射不到的区域);相机垂直于物体表面时(Ordinary),盲区最小。
5. 激光散射
当激光束打在不同的被测物上时,考虑物体表面的散射特性,可分为四种情况:
- 激光打在镜面上时,发生镜面反射,反射方向取决于激光和表面的相对方向,反射光一般不会进入相机,表现为无信号
- 激光打在朗伯体上,发生均匀散射,散射的强度正比于观察方向和表面法向量夹角的余弦,是一种最理想的情况
- 激光打在普通物体上,通常发生定向散射,即最大散射强度出现在一个理想的反射方向上,散射分布的角半宽,取决于表面粗糙度
- 激光打在半透明物体上(塑料、玻璃等),光线会进入物体内部,发生体散射 (volume scattering)

图像来源: 【干货】3D视觉之线激光3D相机_3d线扫相机y精度 csdn-CSDN博客
实际中,物体表面的散射特性是 a) b) c) d) 的混合,其中占主导地位的散射特征,主要取决于表面粗糙度,如下图:
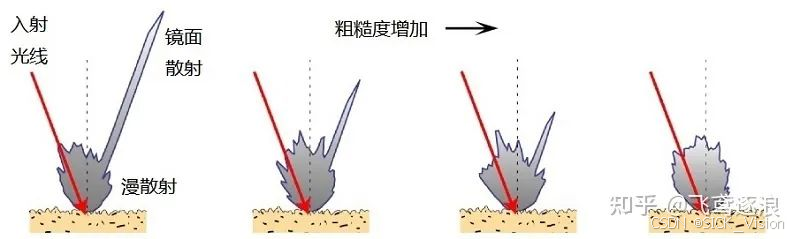
- 随着表面粗糙度的增加,物体的散射特性,由镜面散射占主导地位,逐渐演变为漫散射占主导。如果物体表面的颗粒大小和入射光的波长相近时,激光容易发生相长和相消干涉,产生散斑噪声,如下:

此外,激光散斑噪声,也与成像系统的放大率有关,放大率越大,散斑噪声愈发明显。保持系统结构不变,更换焦距为之前 1/2 的镜头,对于同样的激光条,新拍摄的图像,如下:

三、 SICK 激光三角测量原理系列产品一览
1. 分体式相机系列 -Ranger3

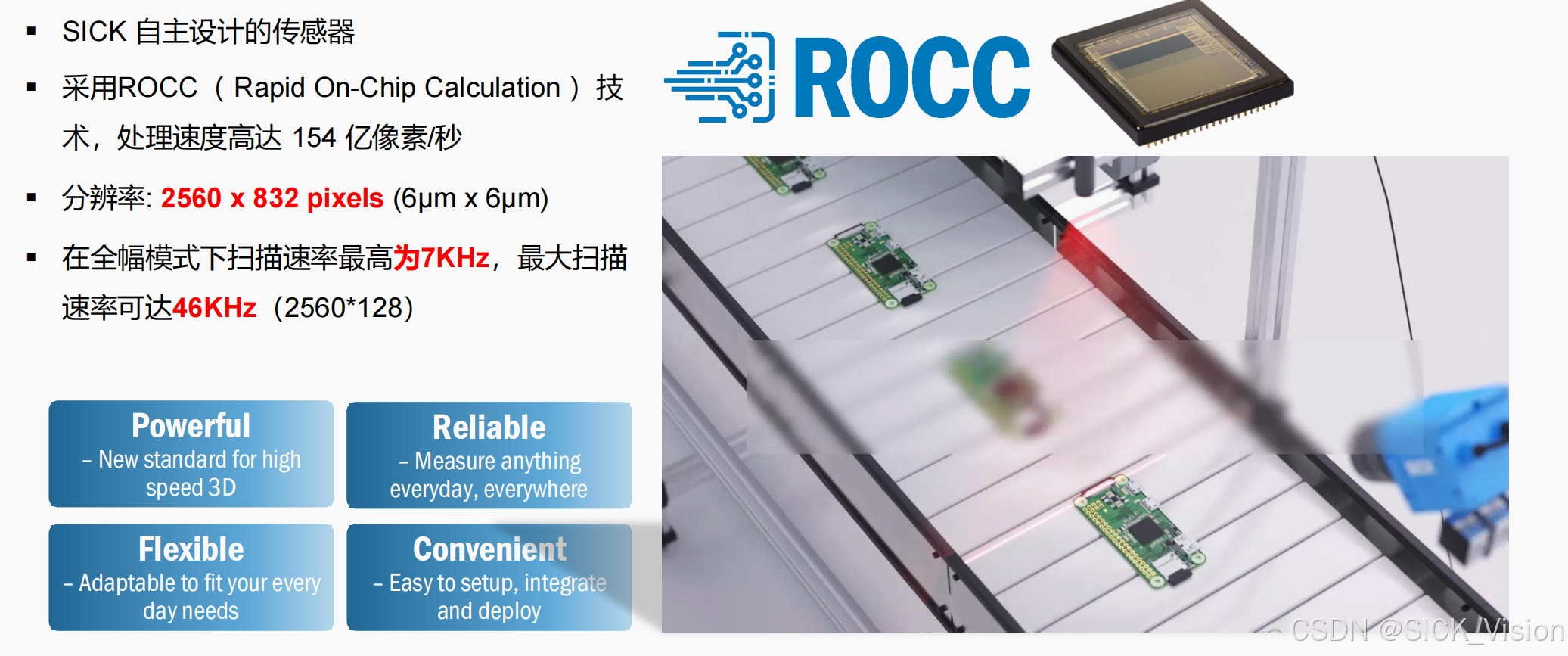
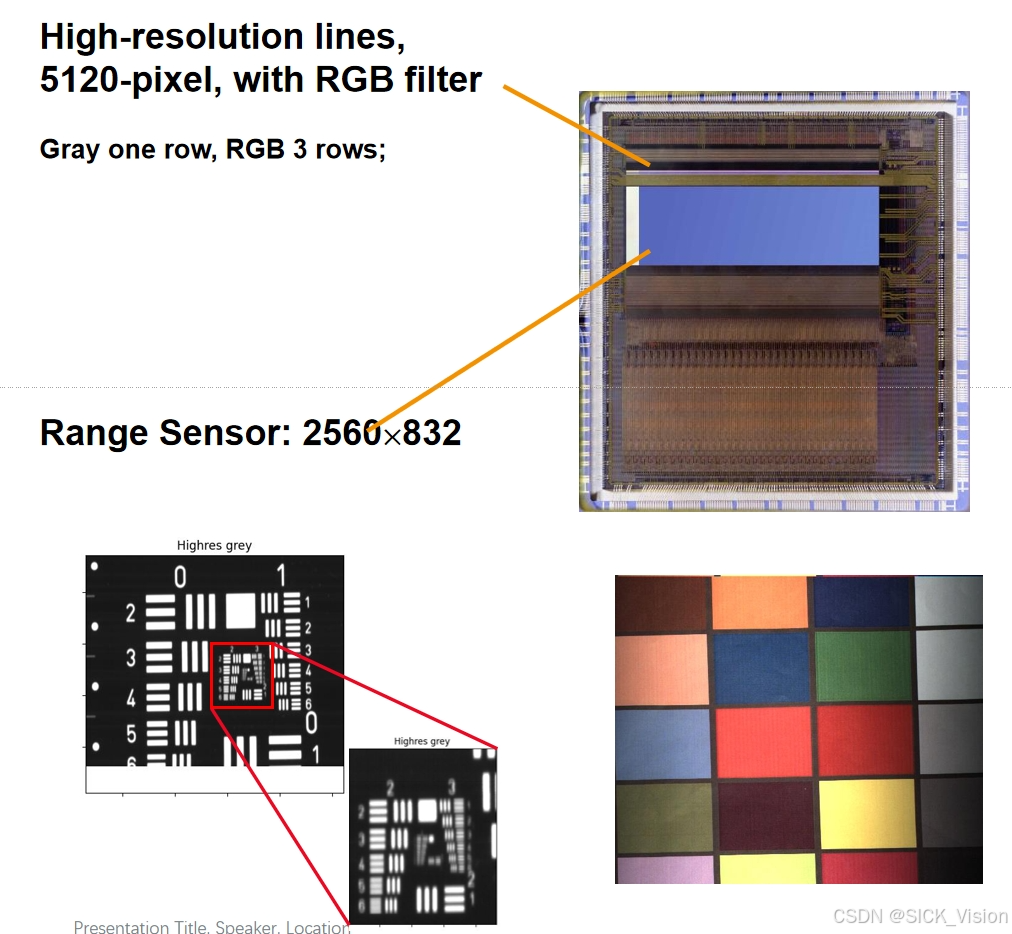
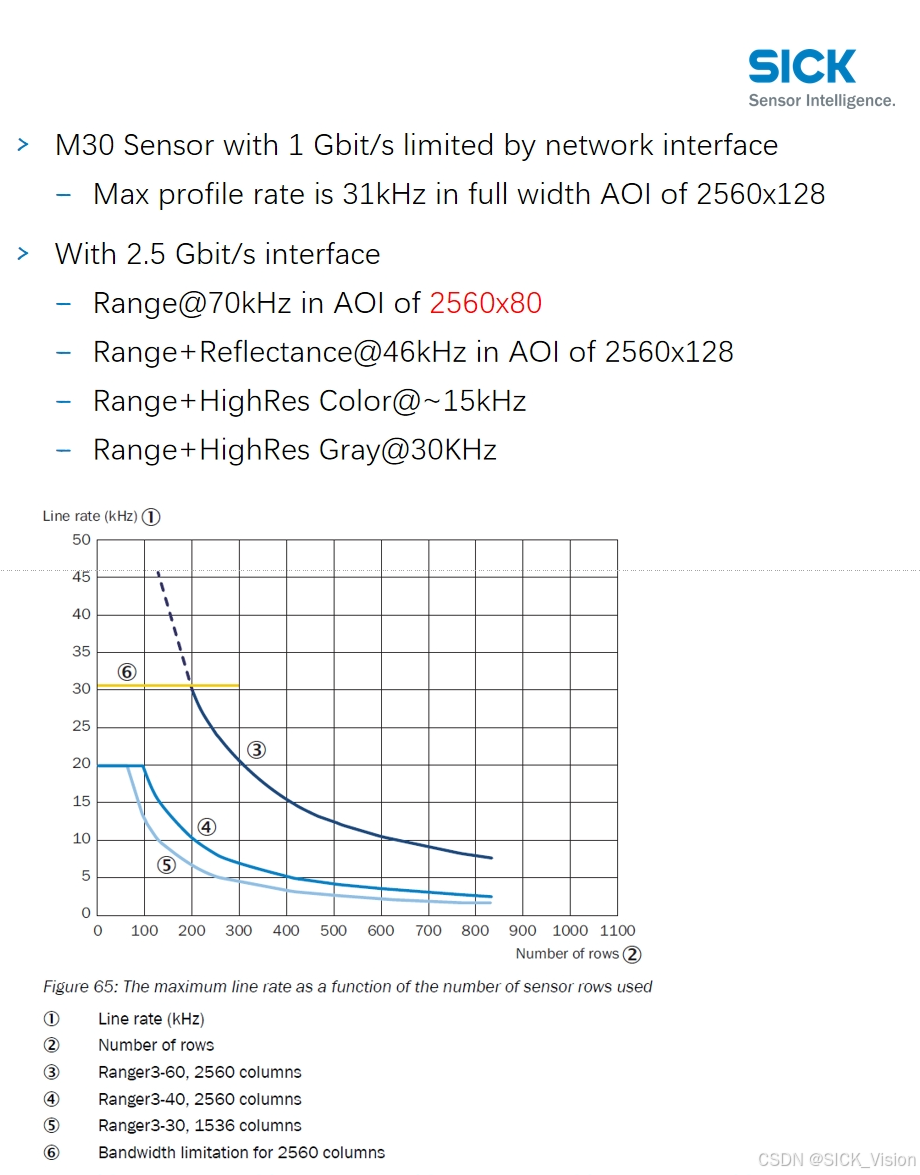
2. 高性能传感器 M30芯片
3. 高精度彩色2D线扫+激光3D线扫一体成像最新技术-Ranger3-80
 |
| 详细参数 |
 |  |
4.成像效果
矿石筛选成像效果

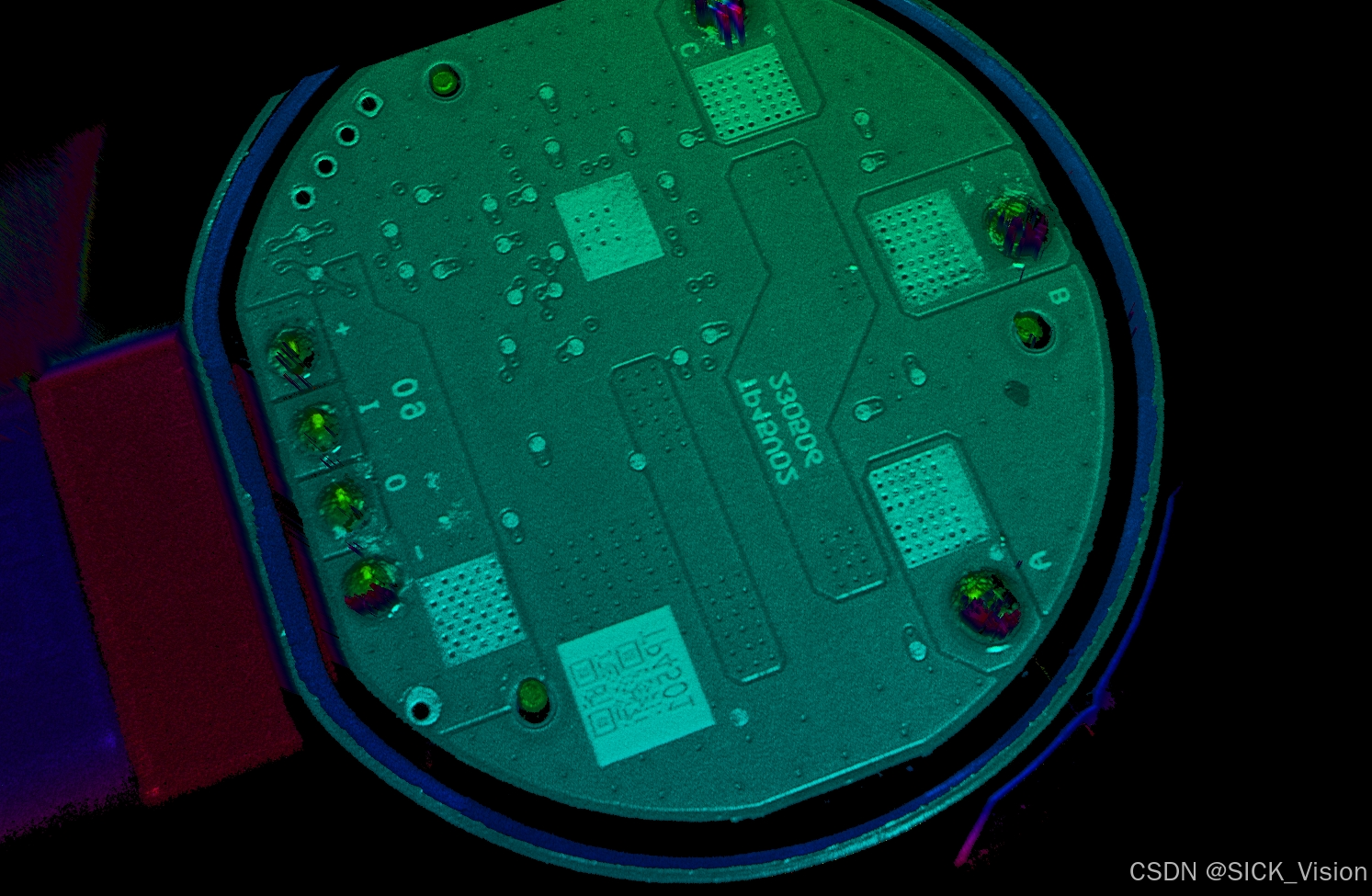
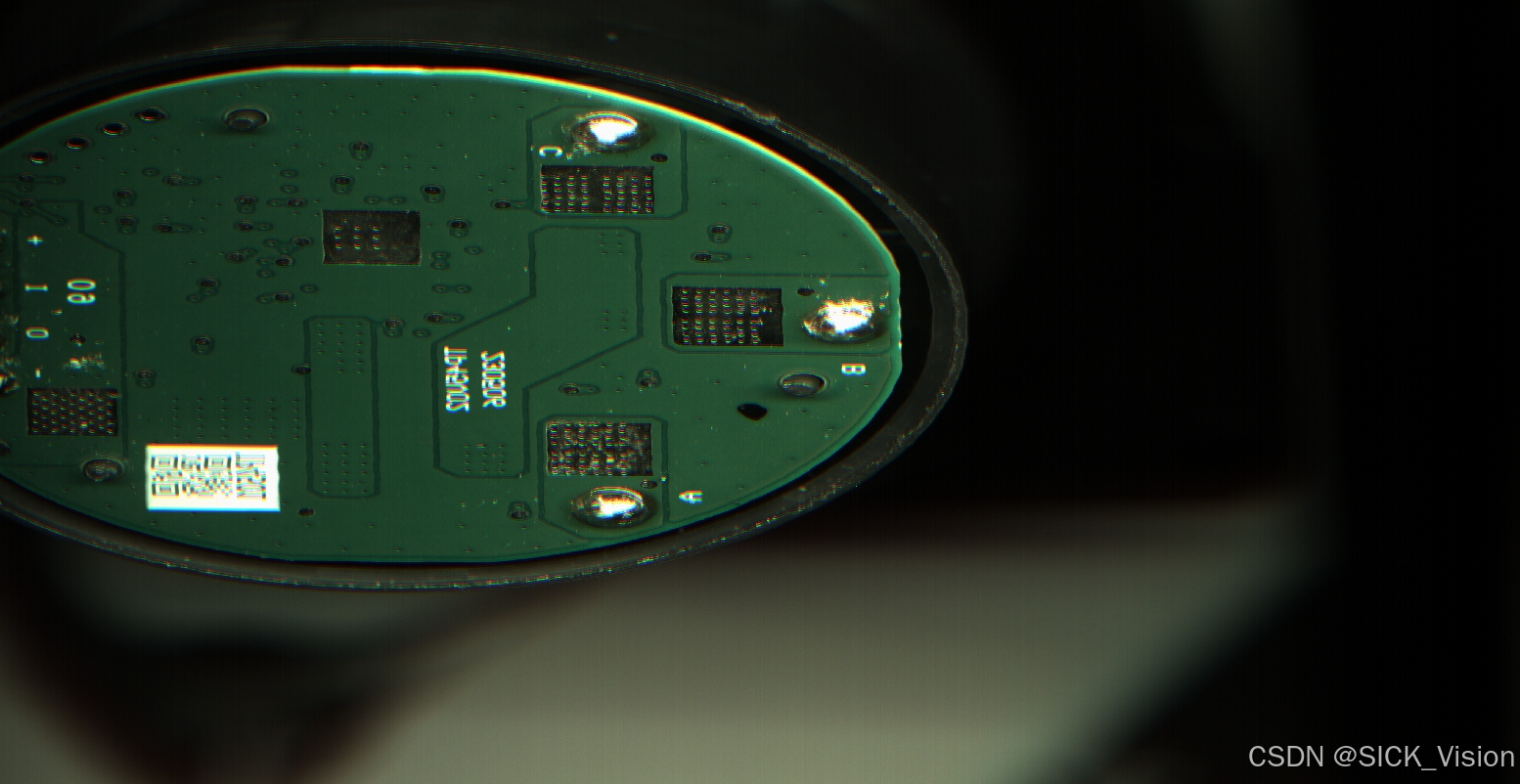
高精度PCB板检测效果
|
|
高质量彩色点云融合数据(pcd格式)


















 1442
1442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









