






1、 我使用的就是check-108,用A3的纸打印了标准的棋盘方格, 其中108代表的是每个小方格的边长为108mm,使用A3的纸张打印,后来测量一下每个黑白方格的边长为35mm。(http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration?action=AttachFile&do=view&target=check-108.pdf)
2、材料和软件都准备好了,我们在准备摄像头,我们有四个选择:(1)手机拍照 我们就标定手机的摄像头,(2)笔记本自带的摄像头,(3)使用带USB的的摄像头(4)网上提供的模板
我是做过1和3
最好是把相机固定 将棋盘格打印出来粘在一个平整的板子上,改编距离和角度,拍下30张左右的照片。
3、开始标定
3.1 点击app–>找到cameraCalibrator

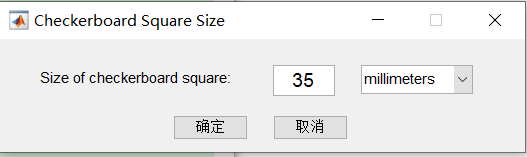
3.2 在弹出的对话框里点击之后可以添加“add images”,然后选择我的模板的方格大小,默认是25mm 改为与实际模板一致的边长是35mm
3.3 点击calibrate,标定完按下图走

3.4 在命令窗口中输入
cameraParams.IntrinsicMatrix和cameraParams.RadialDistortion获得内参矩阵、径向畸变















05-02
01-04
11-08
 1万+
1万+
1万+
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









