







 本文详细介绍了DT7遥控器与DR16接收机的D_BUS串口通信配置,包括波特率设置、奇偶校验等,以及利用DMA进行高效数据搬运和解析。内容涵盖了DMA初始化、中断处理和遥控器数据解析的关键步骤,适合嵌入式开发者参考。
本文详细介绍了DT7遥控器与DR16接收机的D_BUS串口通信配置,包括波特率设置、奇偶校验等,以及利用DMA进行高效数据搬运和解析。内容涵盖了DMA初始化、中断处理和遥控器数据解析的关键步骤,适合嵌入式开发者参考。
遥控器数据处理
串口通信格式
DMA数据处理
遥控器数据处理
中断
在RM比赛中使用的遥控器是DT7,接收机为DR16,使用协议为D_BUS,通信方式为串口通信,同时使用DMA搬运数据。
串口通信:
根据官方文件可知串口通信数据格式:
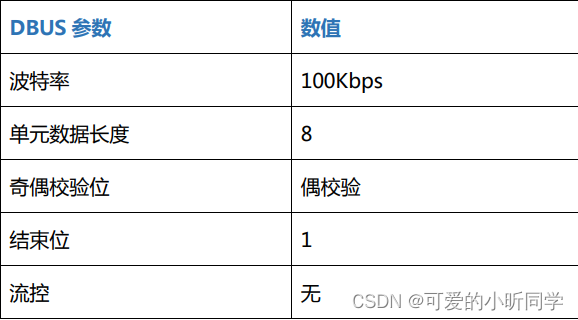
根据官方参数,可知串口配置如下(来自于官方Demo):
USART_InitTypeDef usart2;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA | RCC_AHB1Periph_DMA1, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3, GPIO_AF_USART2);
USART_DeInit(USART2);//串口复位
usart2.USART_BaudRate = 100000;//波特率配置 10000
usart2.USART_WordLength = USART_WordLength_8b;//数据位8位
usart2.USART_StopBits = USART_StopBits_1;//停止位 1位
usart2.USART_Parity = USART_Parity_Even;//校验方式 偶校验
usart2.USART_Mode  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5432
5432

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









