









 本文分享了一位作者自制的Arduino船模遥控器,详细介绍了硬件外观、电路图以及遥控端和接收端的代码实现。通过Arduino控制,实现了摇杆数值的读取和电机、舵机的控制。文章还提供了代码参考链接,适合爱好者学习和交流。
本文分享了一位作者自制的Arduino船模遥控器,详细介绍了硬件外观、电路图以及遥控端和接收端的代码实现。通过Arduino控制,实现了摇杆数值的读取和电机、舵机的控制。文章还提供了代码参考链接,适合爱好者学习和交流。
前言
大概内容:自制船模遥控器的硬件组成和Arduino程序
这是我之前参加学校船模比赛制作的遥控器,在这里分享一下。水平不高,欢迎大家发表意见及建议。
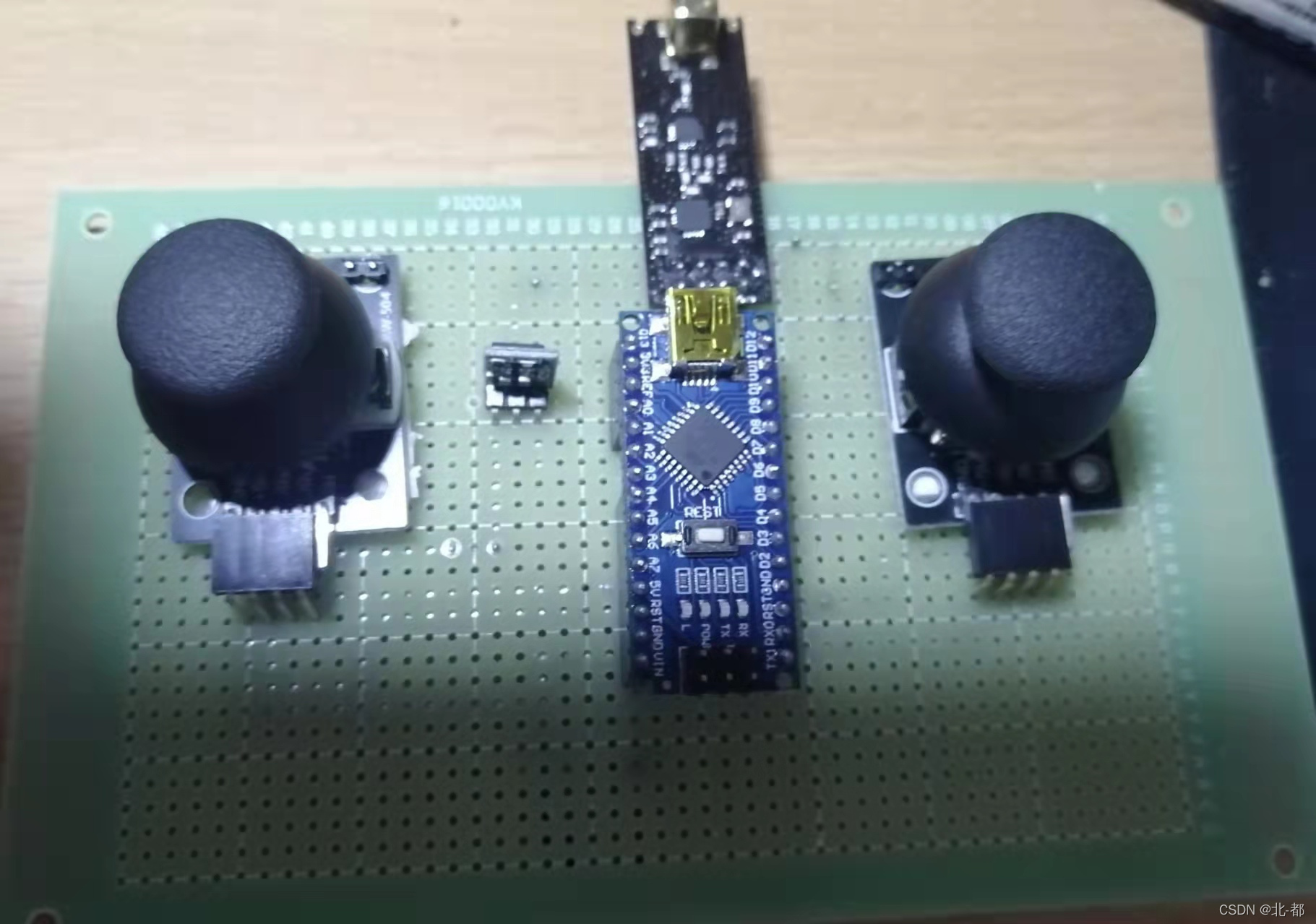
一、遥控器硬件外观
遥控器:
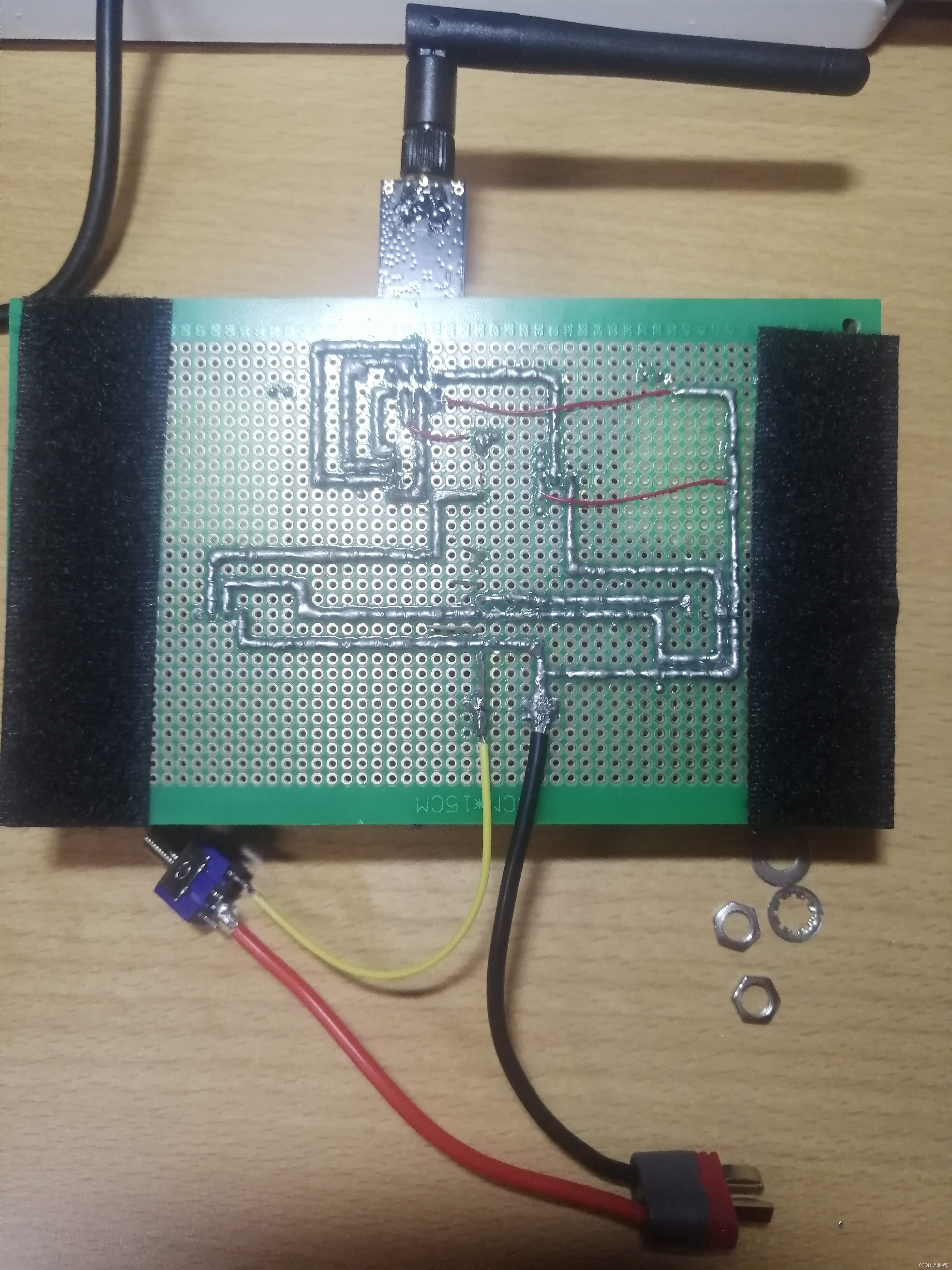
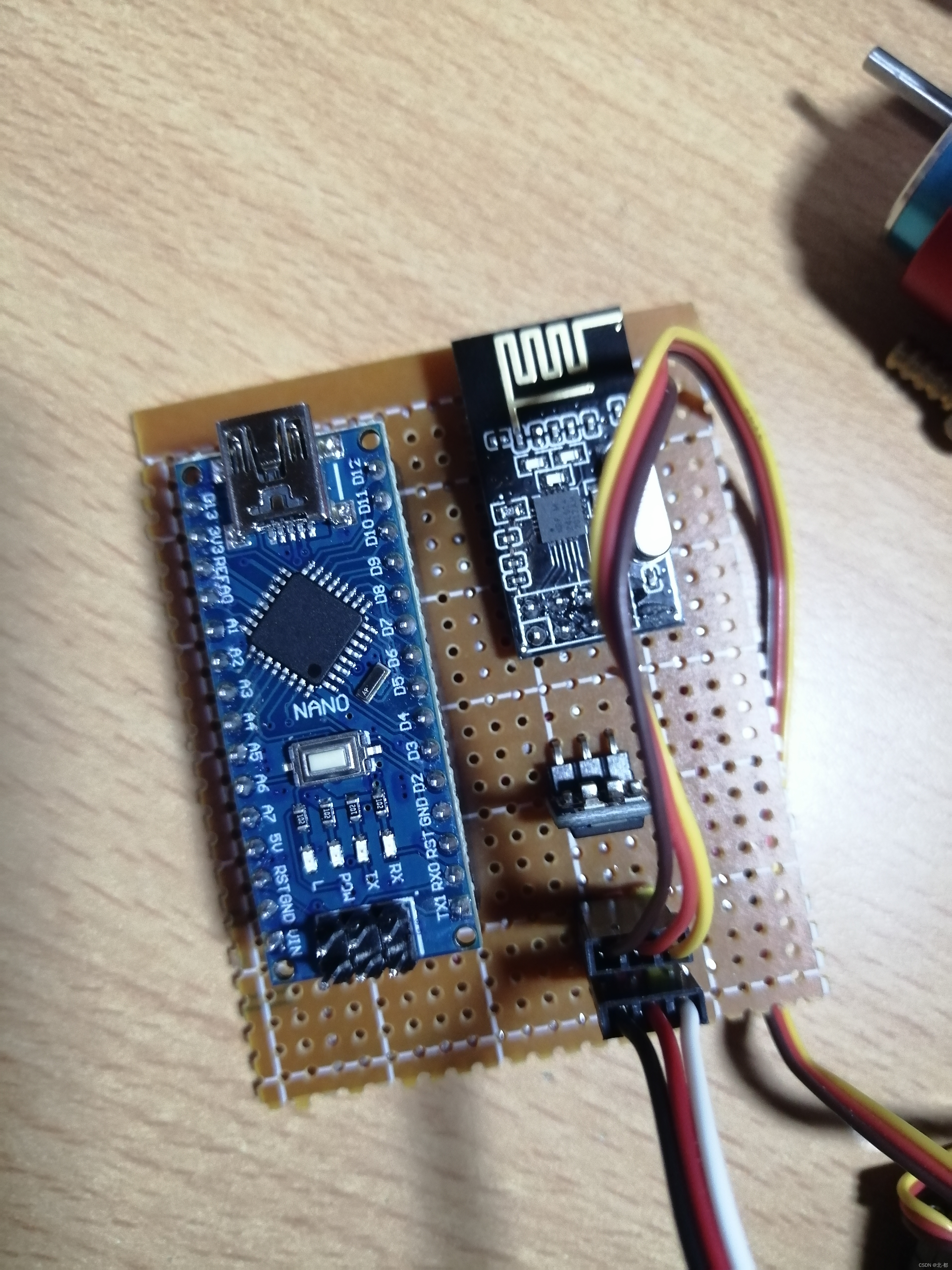
接收器:
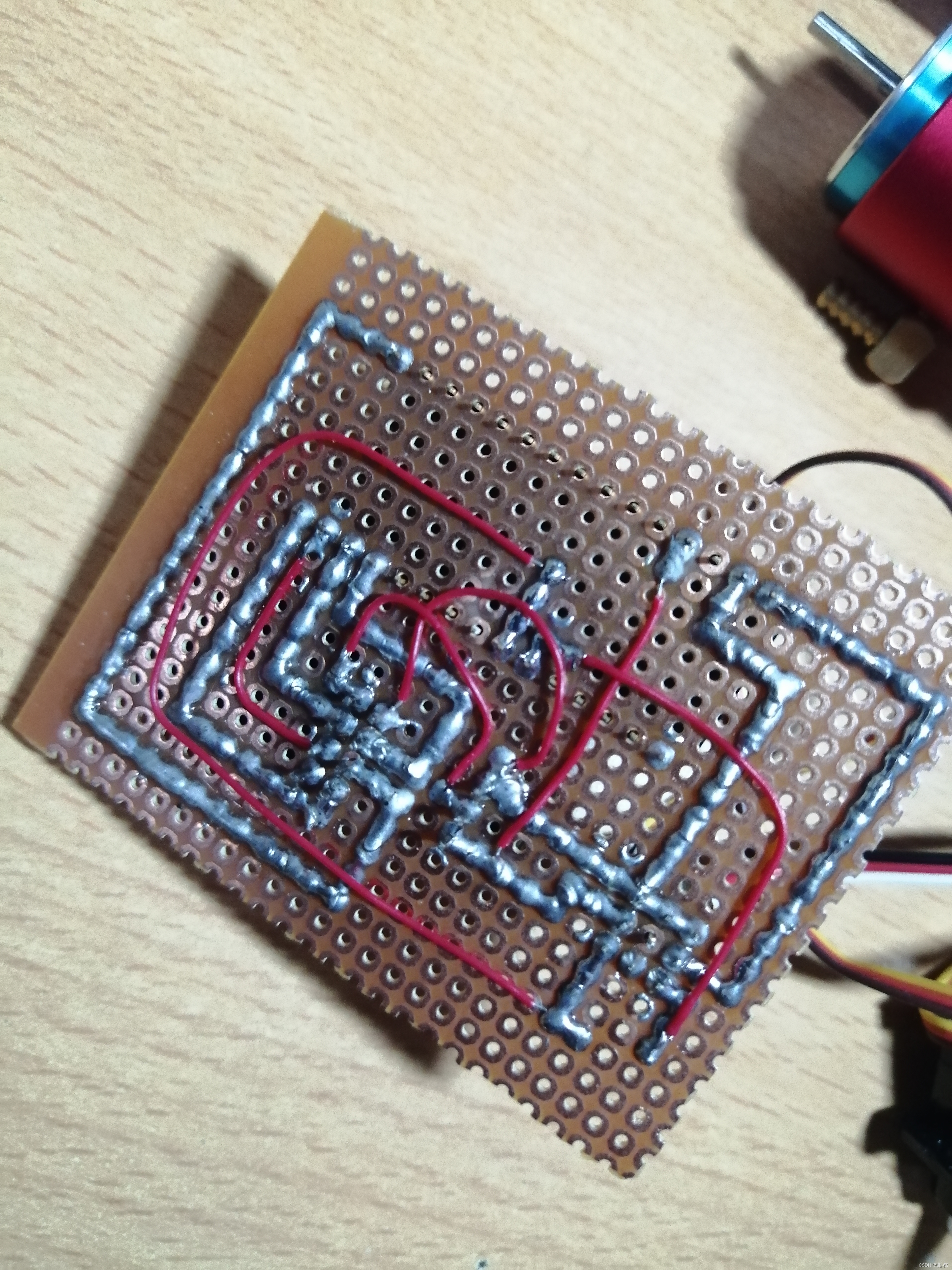
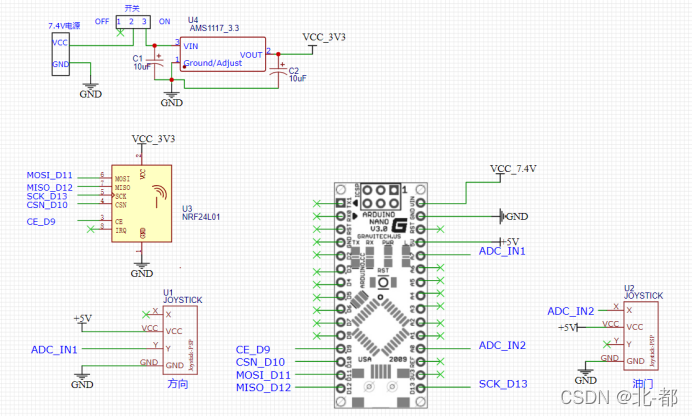
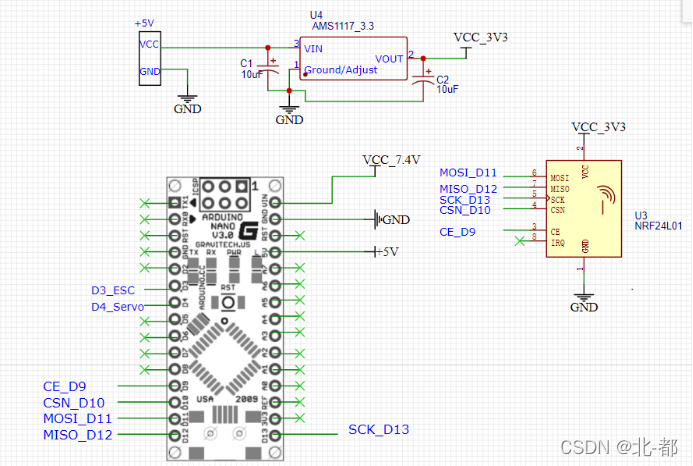
二、电路图
1.遥控端
2.接收端
三、代码
1.遥控端
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10);
//Xval、Yval分别为两个摇杆上的数值,用来控制电机和舵机
struct Signal{
int Xval;
int Yval;
};
Signal Data;
const byte add[6] = "00008";//设置通道,要与接收端一致
void setup() {
pinMode(A7, INPUT);
pinMode(A0, INPUT);
radio.begin();
radio.openWritingPipe(add);
radio.stopListening();
}
//获取摇杆值并发送给接收器
void loop() {
Data.Xval = analogRead(A0);
Data.Yval = analogRead(A7);
radio.write(&Data, sizeof(Signal));
delay(5);
}
2.接收端
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
RF24 radio(9, 10);
Servo ESC;
Servo myS;
struct Signal{
int Xval = 0;
int Yval = 0;
};
Signal Data;
const byte add[6] = "00008";
unsigned long lastTime = 0;
unsigned long now = 0;
void setup() {
ESC.attach(3, 1000 , 2000);
myS.attach(4, 800, 2200);
radio.begin();
radio.openReadingPipe(0, add);
radio.startListening();
}
void loop() {
recvData();
now = millis();
if(radio.available()){
radio.read(&Data, sizeof(Signal));//获取遥控端数值
//将获取到的数值进行映射在合理范围
Data.Xval = map(Data.Xval, 0, 1023, 1000, 2000);
Data.Yval = map(Data.Yval, 0, 1023, 800, 2200);
ESC.writeMicroseconds(Data.Xval);
myS.writeMicroseconds(Data.Yval);
}
//若长时间收不到数据则重新开启通道进行接收
if(now – lastTime >1000){
resetData();
}
}
void recvData(){
while(radio.available()){
lastTime = millis();
}
}
void resetData(){
radio.begin();
radio.openReadingPipe(0, add);
radio.startListening();
}
总结
软硬件及电路图连接均如上所示。代码参考网站点此处
以上就是本文全部内容了,感谢大家阅读!

















 6541
6541

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









