







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
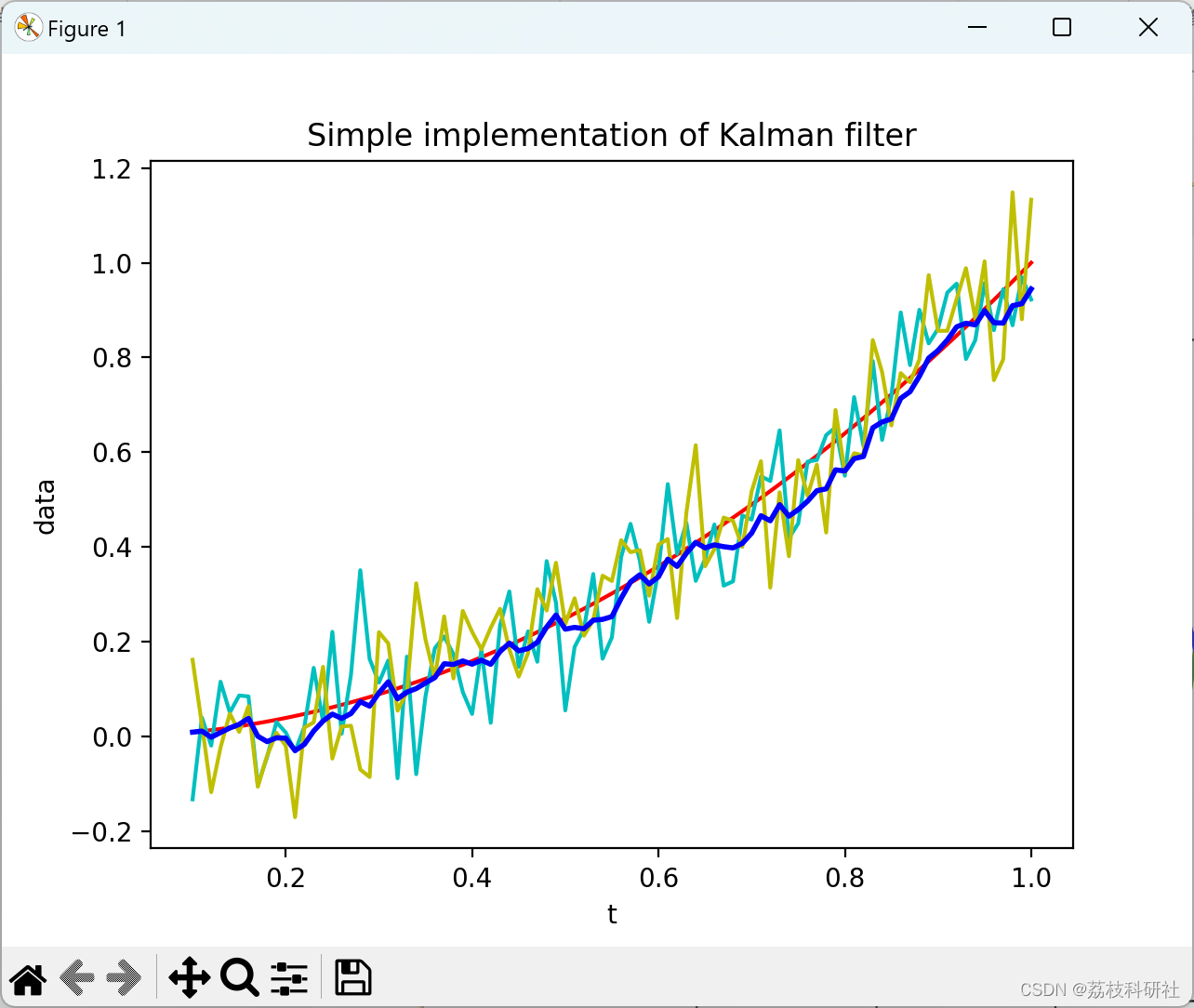
本文基本思路是:首先生成一个含有噪声的信号,然后对其进行KF滤波,使得噪声得到一定程度的削减,从而还原出原信号。具体实现中,使用了状态方程和观测方程,根据状态方程和观测方程来设定F、H、Q、R这四个矩阵,并通过计算KF滤波的五大公式来实现滤波。程序的最后一段是用不同颜色的线条展示出原信号、观测信号和滤波之后的信号,方便直观的比较三者的差异。
📚2 运行结果
2.1 KF
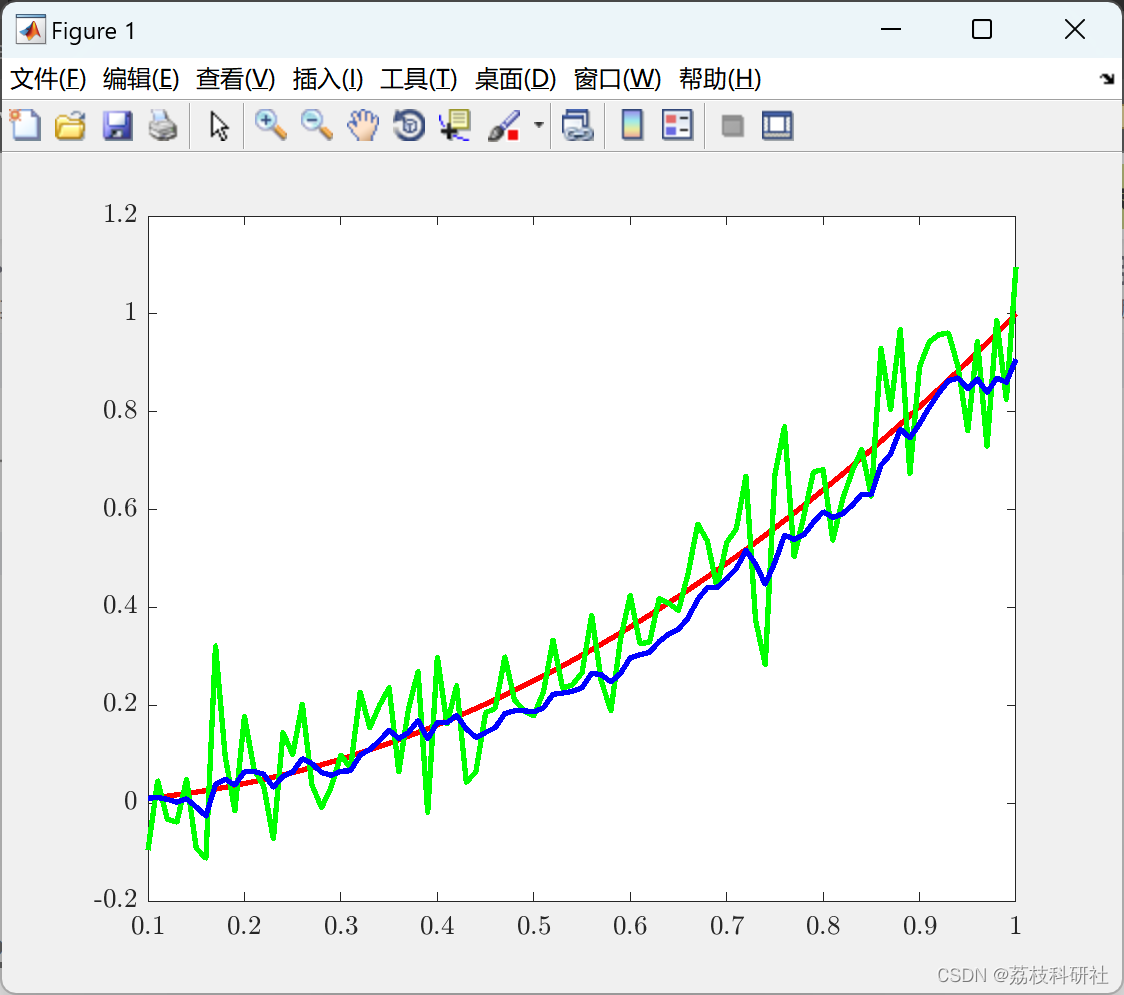
蓝色:滤波后
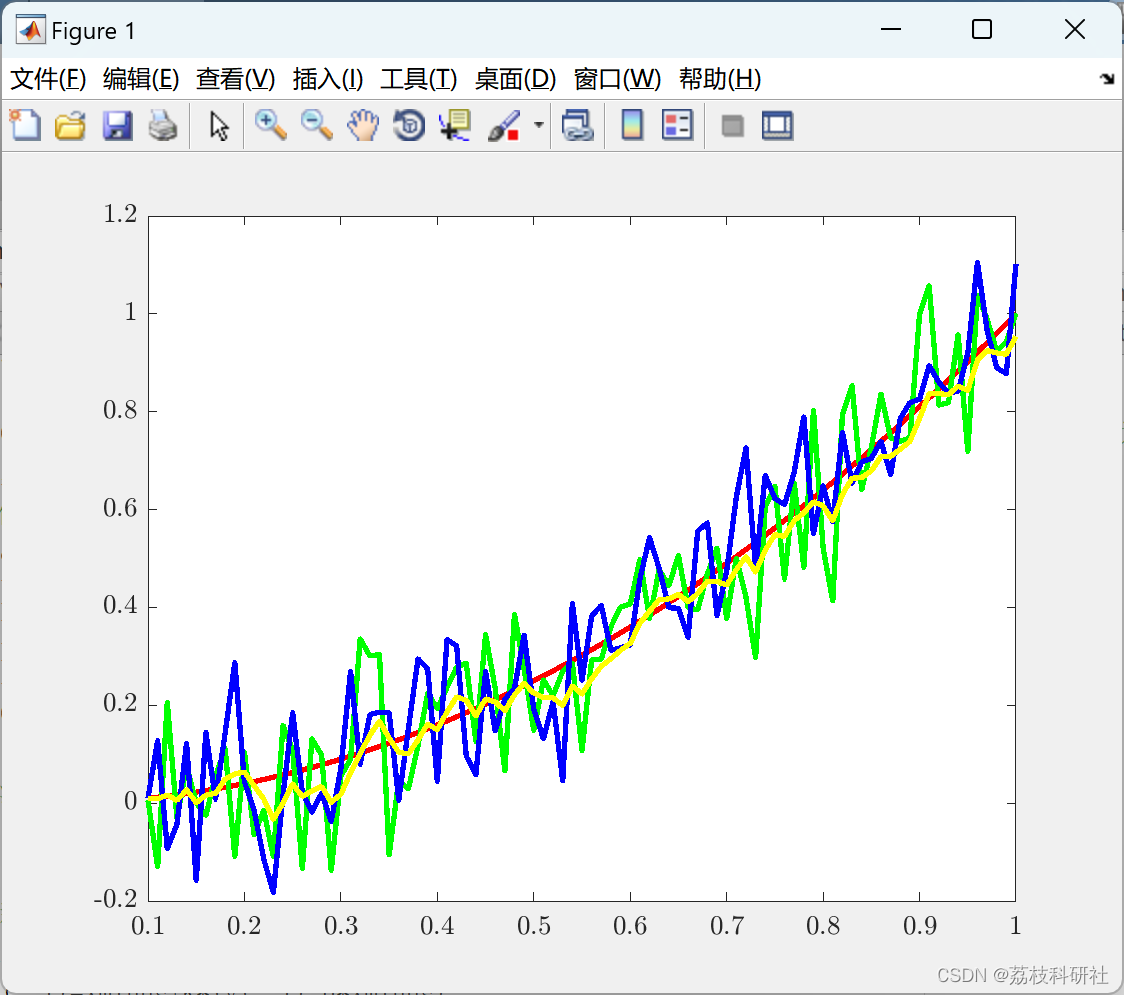
黄色:滤波后
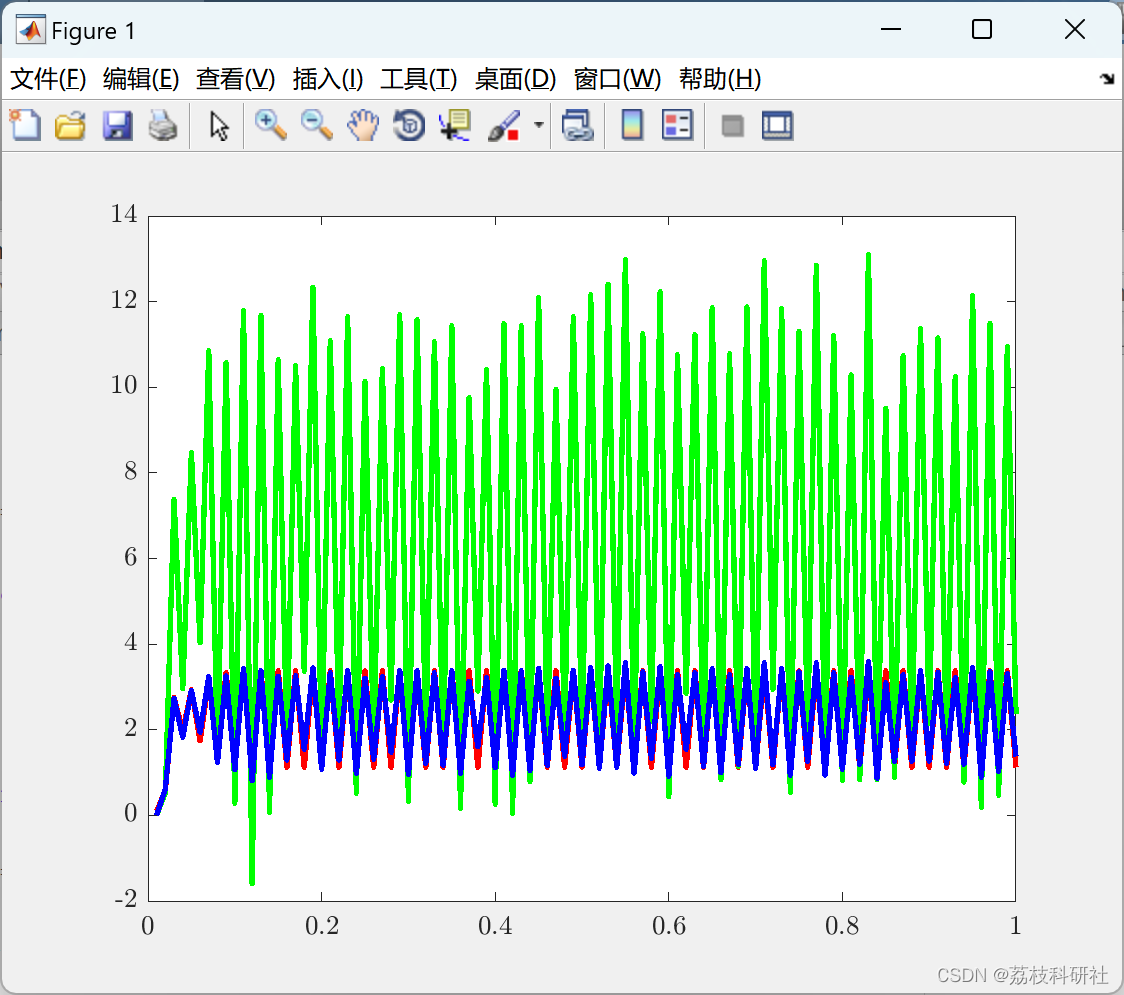
2.2 PF
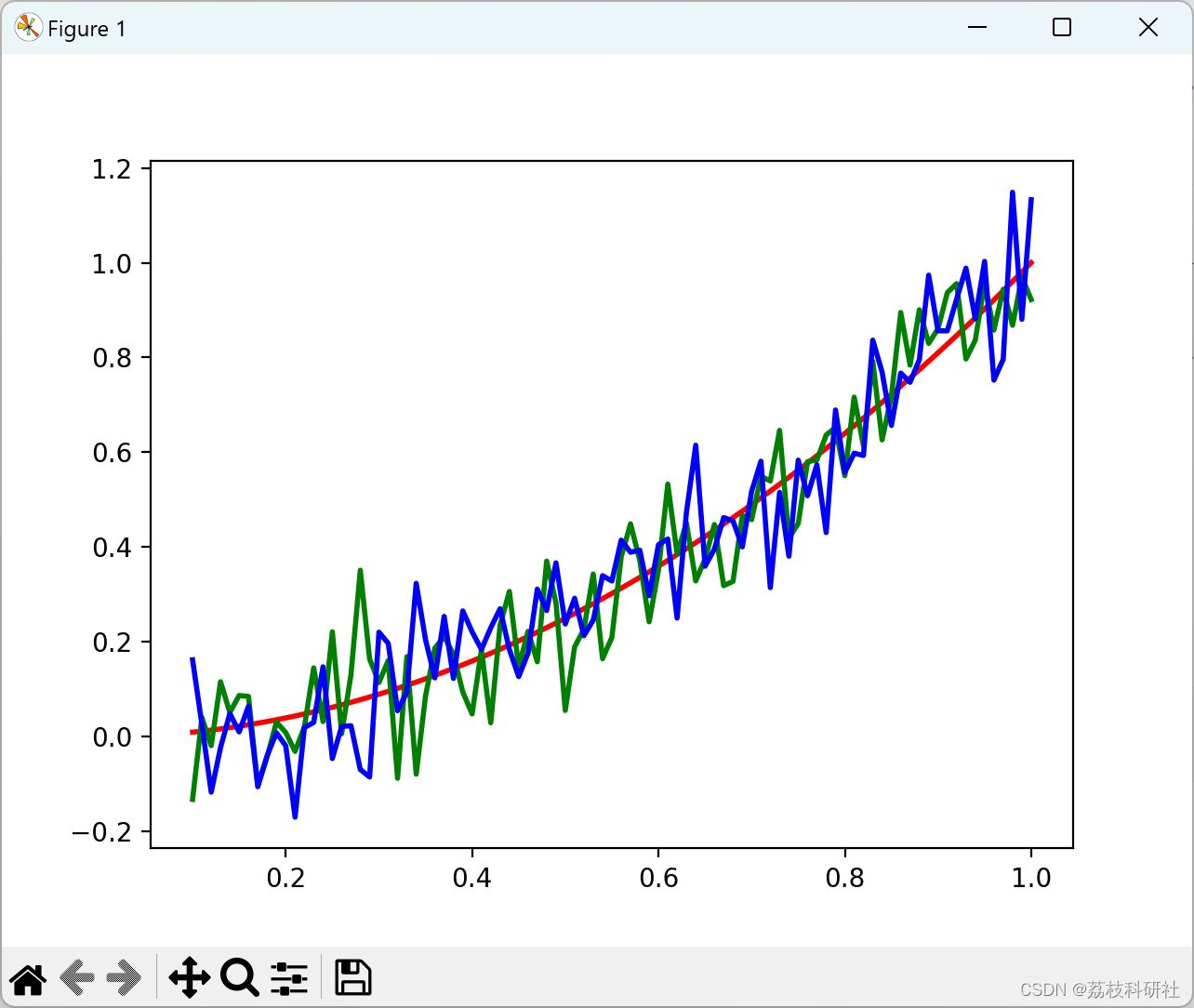
2.3 Python实现
部分代码:
%%%%%PF核心代码%%%%%
for i = 2:L
%预测步 改变例子位置
for j = 1:L
xold(j) = sin(xold(j))+5*xold(j)/(xold(j)^2+1)+normrnd(0,0.1);
end
%更新步 改变例子权重
for j = 1:L
%w1(i) = fR(y1-h(x1(i)))w0(i)
%此处fR假设为正态分布 R~(0,0.1)
%fR = (2*pi*R)^(-0.5)*exp(-((y(i)-xold(j)^2)^2/(2*R)))
w(j) = exp(-((y(i)-xold(j)^2)^2/(2*0.1)));
end
%归一化 此处我使用两种方法进行w的归一化,方法二得到的w最终整体的滤波效果更好,why?
%%方法一
% for j = 1:L
% w(j) = w(j)/sum(w);
% end
%%方法二
w = w/sum(w);
% plot(t,w,'y',LineWidth=2)
%重采样
c = zeros(1,L);%每个粒子权重区间
c(1) = w(1);
for j = 2:L
c(j) = c(j-1)+w(j);
end
for j=1:L
a = unifrnd(0,1);%随机生成
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1] LinxinBao,Bayesian and Kalman filtering implementation.
[2] 夷立华,施佳佳,许致火,施佺.利用时变噪声贝叶斯卡尔曼滤波的室内移动目标定位[J].电讯技术,2020,60(03):303-309.

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











