







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
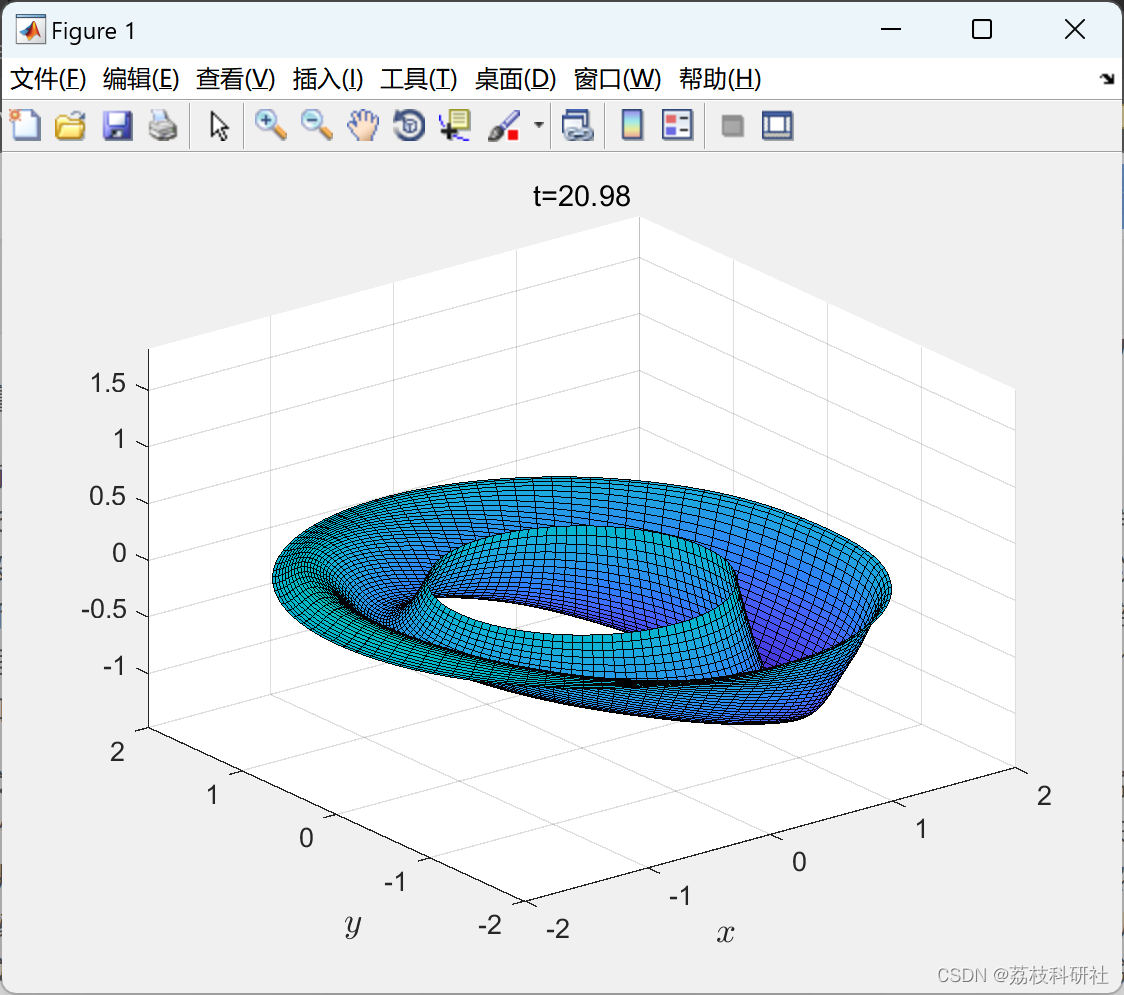
本文扩展了具有边界控制和边界观测的系统的内部模型原理,并为此类系统构建了一个鲁棒控制器。然而,由于内部模型原理,具有无限维输出空间的工厂的任何鲁棒控制器都必然具有无限维状态空间。我们继续制定近似鲁棒输出调节问题,并提出一个有限维控制器结构来求解它。我们的主要激励示例是在有界多维空间域上具有力控制和速度观测的波动方程。为了说明理论结果,我们在环形域上为波动方程构建了一个近似鲁棒控制器,并通过数值模拟证明了其性能。
直观地说,给定工厂的输出调节问题相当于设计一个输出反馈控制器,该控制器稳定工厂,此外,尽管给定的干扰信号,工厂的输出仍跟踪给定的参考信号。如果单个控制器解决了工厂的输出调节问题,也解决了工厂的小扰动问题,以及或多或少的任意参考和干扰信号,那么该控制器被称为解决了鲁棒输出调节问题。有关这些概念的确切定义,请参阅第四节的开头。
在文献中,具有有界控制和观测算子的分布式参数系统[1]-[5]的积极研究输出跟踪和干扰抑制,并且在[6]-[7]中为具有无界控制和观测算子的系统类别(如良位[8]和常规系统[11])构建了鲁棒控制器。设计鲁棒控制器的关键是内部模型原理,该原理在其经典形式中指出,控制器只有在包含以下情况下才能解决鲁棒输出调节问题p外系系统动力学的副本,其中p是工厂输出空间的维度。内部模型原理首先由Francis和Wonham[12]和Davison [13]提出用于有限维线性植物。该原理后来在[11],[14]和[15]中推广到无限维线性系统,假设植物是规则的。
在本文中,我们重点介绍了具有边界观测的边界控制系统的输出调节。我们的激励示例是多维空间域上的波动方程,在边界的一部分上进行力控制和速度观察。这n-D波系统从强大的控制角度来看具有挑战性,因为它既不是规则的,也不是很好的。此外,波浪系统的输出空间是无限维的,然后内部模型原理意味着任何鲁棒控制器也必须是无限维的。然而,作为本文的主要贡献,我们证明了可以实现参考信号的近似跟踪,因为输出和参考信号之间的差异变得很小,因为→∞.更准确地说,我们引入了一种新的有限维控制器,它解决了这种近似意义上的鲁棒输出调节问题,从而将最近的结果[16]扩展到连续时间。同时,我们扩展了可以跟踪的参考信号类别。作为该控制器构造的一部分,我们提出了调节误差的上限。
📚2 运行结果
运行视频:
【鲁棒】边界控制系统的近似鲁棒输出调节(Matlab代码实现)
部分代码:
% time average of the regulation error
for s = 1:numel(tt)-Nt
ent(s) = trapz(0:1/Nt:1, en(s:s+Nt));
end
Y = real(Y); % neglect imaginary part (should be zero)
%% variables for visuallization
% annular grid
Nr = 50;
Nth = 100;
[rrg,thg] = meshgrid(linspace(1,2,Nr),linspace(0,2*pi,Nth));
rr = rrg(:).';
th = thg(:).';
xxg = reshape(rr.*cos(th),Nth,Nr);
yyg = reshape(rr.*sin(th),Nth,Nr);
% basis for the wave profile
pnvals = zeros(Nvals*(2*Mvals-1),numel(rr));
for indn = 1:Nvals
for indm = 0:(Mvals-1)
if indm==0
indran = (indn-1)*(2*Mvals-1) + 1;
pnvals(indran,:) = phinm1(rr,th,indn,0);
else
indran = (indn-1)*(2*Mvals-1) + 2*indm - 1 + (1:2);
pnvals(indran,:) = [phinm1(rr,th,indn,indm);phinm2(rr,th,indn,indm)];
end
end
end
%% visualizations
% regulation error
del = 0.01; % approximate tracking tolerance
semilogy(tt(1:numel(tt)-Nt), real(ent), 'linewidth', 1.5)
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Jukka-Pekka Humaloja, Mikael Kurula, Lassi Paunonen (2018) Approximate robust output regulation of boundary control systems
















 1476
1476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











