







一、线性鲁棒输出调节产生的原因

由线性输出调节方程如下(1.18),可以看出线性输出调节的反馈增益KV依赖于系统系数A、B、C、D、E、F有关。因此,如果系统系数存在扰动,线性输出调节方程就不适用了,所以不存在静态的反馈控制,因此需要寻找其他的控制器来求解。
线性鲁棒输出调节问题可以通过内模解决,即在反馈设计中加入一个能够重构w的适当模型,该模型就是内模。
二、线性内模原理
2.1 内模的作用
由于存在外部扰动w,外系统A1的实际值与理论值之前存在差异,因此在设计反馈控制过程中,需要考虑外部扰动对于系统的影响。解决办法之一就是对外部扰动的信号进行重构,估计出A1的实际值,这样在反馈控制就可以根据外部信号的扰动实时调整控制器输出,解决外部扰动对于控制性能的影响。
综上所述,线性鲁棒输出调节的核心问题之一就在于:构造能够重构外系统的实际值(外部扰动被考虑在内),记为
,代表A1的估计值。在控制器设计过程中,始终假设
。
内模的作用:把外部作用信号的动力学模型植入控制器,来构成高精度反馈控制系统的一种设计原理。
具体措施:在反馈回路中,放入一个与外部动力学模型相同的模型,由于这个模型是放在反馈回路中(系统内部),因此为内模。在设计出内模后,将内模放入反馈回路,会形成增广系统。
2.2 内模原理概念


3.3 线性内模的构造
内模的作用:在反馈设计中加入一个能够重构外部扰动信号状态量w的适当模型,该模型就是内模。在输出反馈中,z就是系统的一个内模:
定义:矩阵对,其中
为
的最小多项式的阶,如果:
(1)矩阵对可控;
(2)的最小多项式等于
的特征多项式。
则称矩阵对浸入到
的内模。
令,
,则称矩阵对
或下列动态方程
为系统(6)的内模。
内模(14)和系统(6)统称为增广系统,并记为

三、线性鲁棒输出调节的解决方法

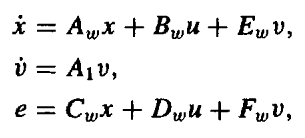
3.1 原系统+外部系统
3.2 系统内模

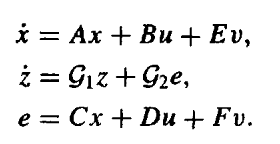
3.3 增广系统
3.4 线性鲁棒输出调节方程:

















 3789
3789











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











