







 文章探讨了升压斩波电路中PID调节器对输出电压稳定性的影响,强调了控制器参数整定的重要性。通过分析控制器的性能和传递函数,提出启发式参数整定方法,并基于闭环控制系统确定最优参数。此外,还介绍了使用Simulink进行代码实现的过程。
文章探讨了升压斩波电路中PID调节器对输出电压稳定性的影响,强调了控制器参数整定的重要性。通过分析控制器的性能和传递函数,提出启发式参数整定方法,并基于闭环控制系统确定最优参数。此外,还介绍了使用Simulink进行代码实现的过程。
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
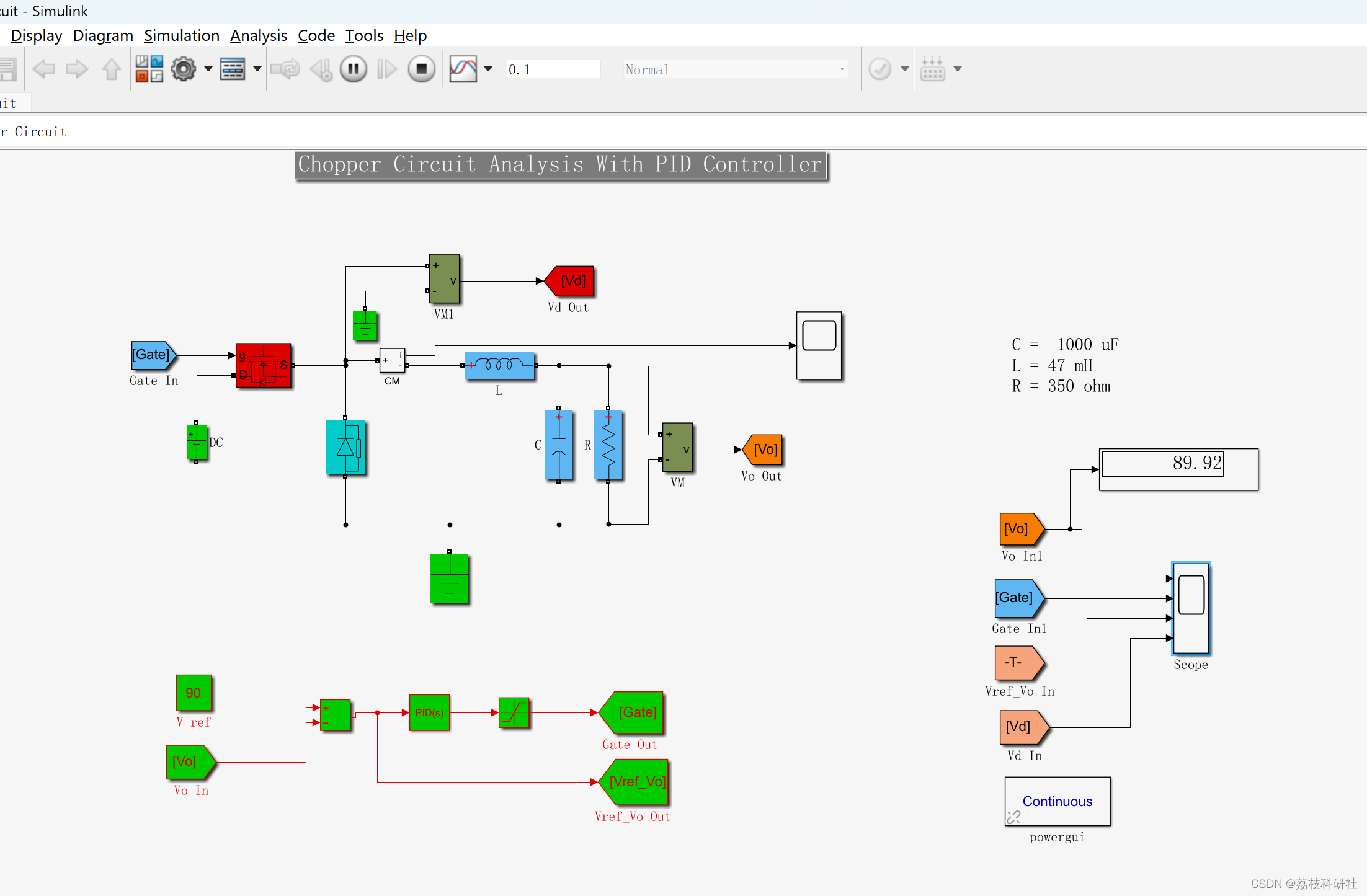
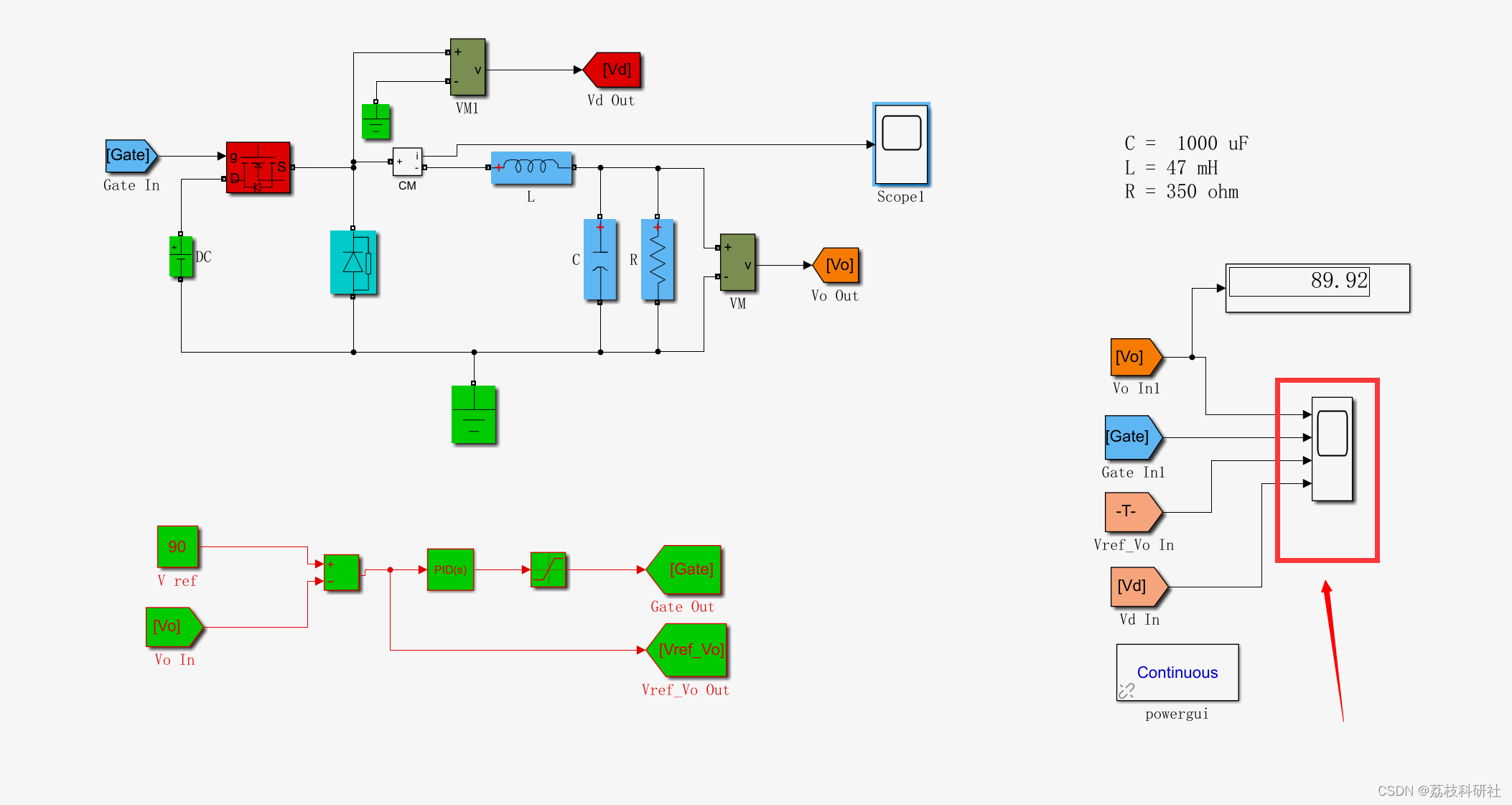
斩波电路在各类电力电子电路中的应用十分广泛,
它将低压直流电变为高压直流电,
为负载提
供了稳定的直流电压
。
升压斩波电路的
PI
和
PID 调节器的性能对输出的电压影响很大。
由于这种斩波电路工作于开关模式下,
是一个强非线性系统
。
虽然可以利用状态方程和边界条件求出任意一次开关的输出量,
但对于系统分析十分不便
。
PID
控制器是常规控制器中性能最好的一种
。
由于它具有各类控制器的优点,
因而使系统具有更高的控制质量,
其传递函数为
:

控制器参数整定
是指通过设定控制器的可调参数
,使输入特性和响应特性获得最佳匹配,
以改善系统的动态和稳态性能,
取得最佳的控制效果
。 对于
PID
控制器来说,
可调参数包括比例增益 Kc
、
积分时间Ti
和微分时间Td 。
PID
参数整定方法可以分为解析式方法、
启发探索式方法、
频率响应法
、
最优化方法以及自适应整定法
。启发探索式参数整定方法是由动手实践发展起来的,具有较强的广泛性和适用性,
本文在现有研究的基础上对该方法进行深入研究,并基于闭环控制系统确定
PID
控制器的最优参数整定方法。
斩波电路用于将固定直流转换为可变直流电源。在这里,在这个模型中,我们习惯于PID控制器来获得稳定性。
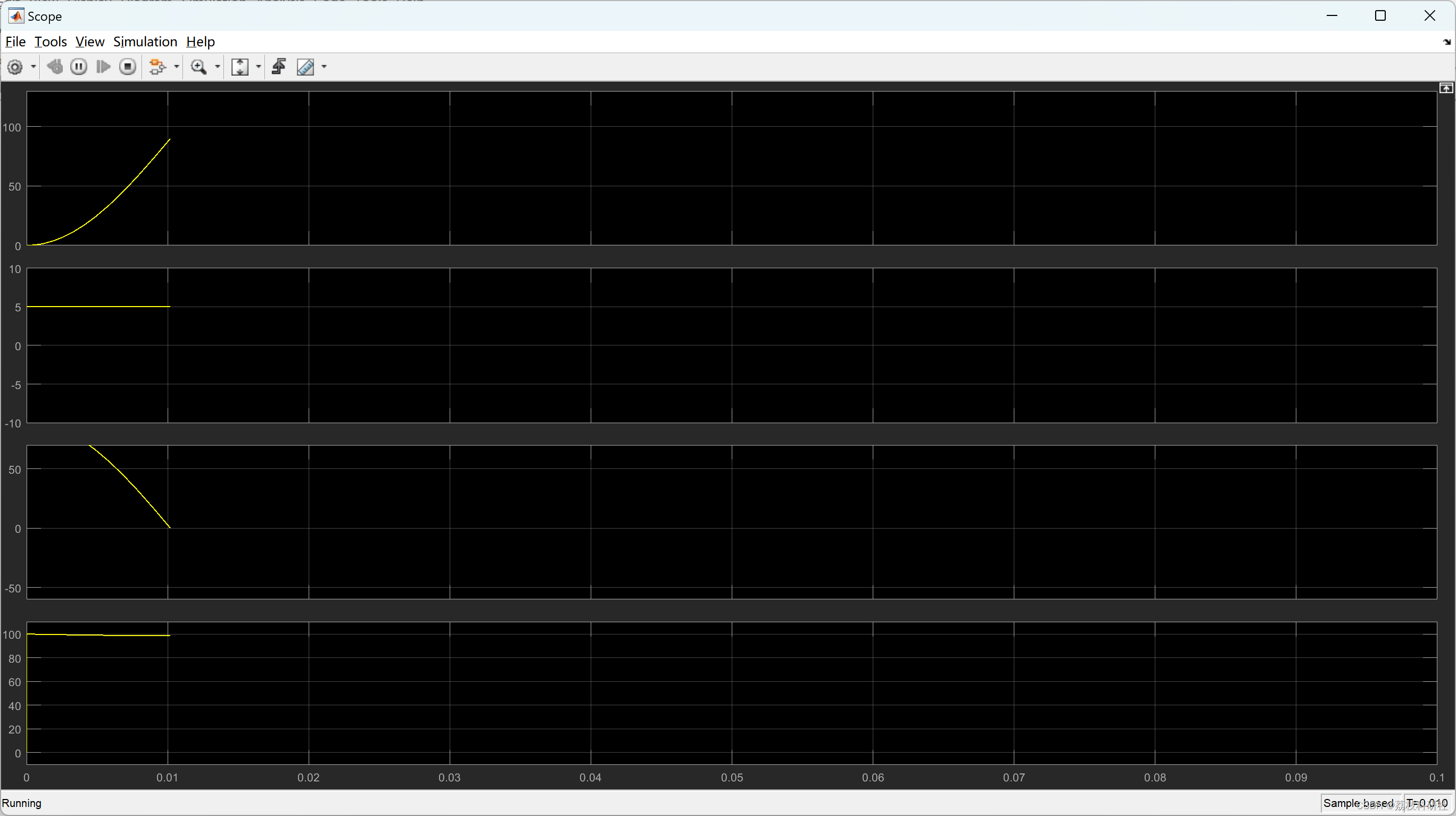
📚2 运行结果
运行时间比较长,需要耐心等待:
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]朱鹏程,郭卫农,陈坚.升压斩波电路PI和PID调节器的优化设计[J].电力电子技术,2001(04):28-31.
[2]王彰云.基于模糊PID控制的单相交流斩波调压系统设计[J].产业与科技论坛,2012,11(18):78-79.
[1]刘冰琪,解初,刘鹏.PID控制器最优参数整定方法的研究[J].科技风,2022(19):1-3.DOI:10.19392/j.cnki.1671-7341.202219001.



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











