






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
研究无人机受控系统的矢量化,可以在 Simulink 中建立一个模型来模拟和分析系统的动态行为。矢量化控制是一种常用的控制技术,通过控制方向和大小来实现对系统的精确控制。
在 Simulink 中,可以使用各种控制器、传感器和执行器模块来构建完整的无人机受控系统模型。您可以考虑对系统进行建模和仿真,以便分析不同控制算法对系统稳定性、性能和鲁棒性的影响。
为了进行矢量化研究,需要考虑以下几个方面:
1. 动力学模型:建立无人机的动力学模型,包括飞行器的运动方程、姿态动力学等。
2. 控制算法:选择适当的控制算法,如 PID 控制器、模糊控制器或者神经网络控制器等,来实现矢量化控制。
3. 状态估计:设计状态估计器以获取系统状态信息,如位置、姿态、速度等。
4. 仿真及分析:在 Simulink 中进行仿真实验,分析系统的响应、稳定性和性能,并优化控制策略。
通过在 Simulink 中建立无人机受控系统的矢量化模型,您可以深入了解系统的行为,并优化控制算法,以实现更精准的控制效果。
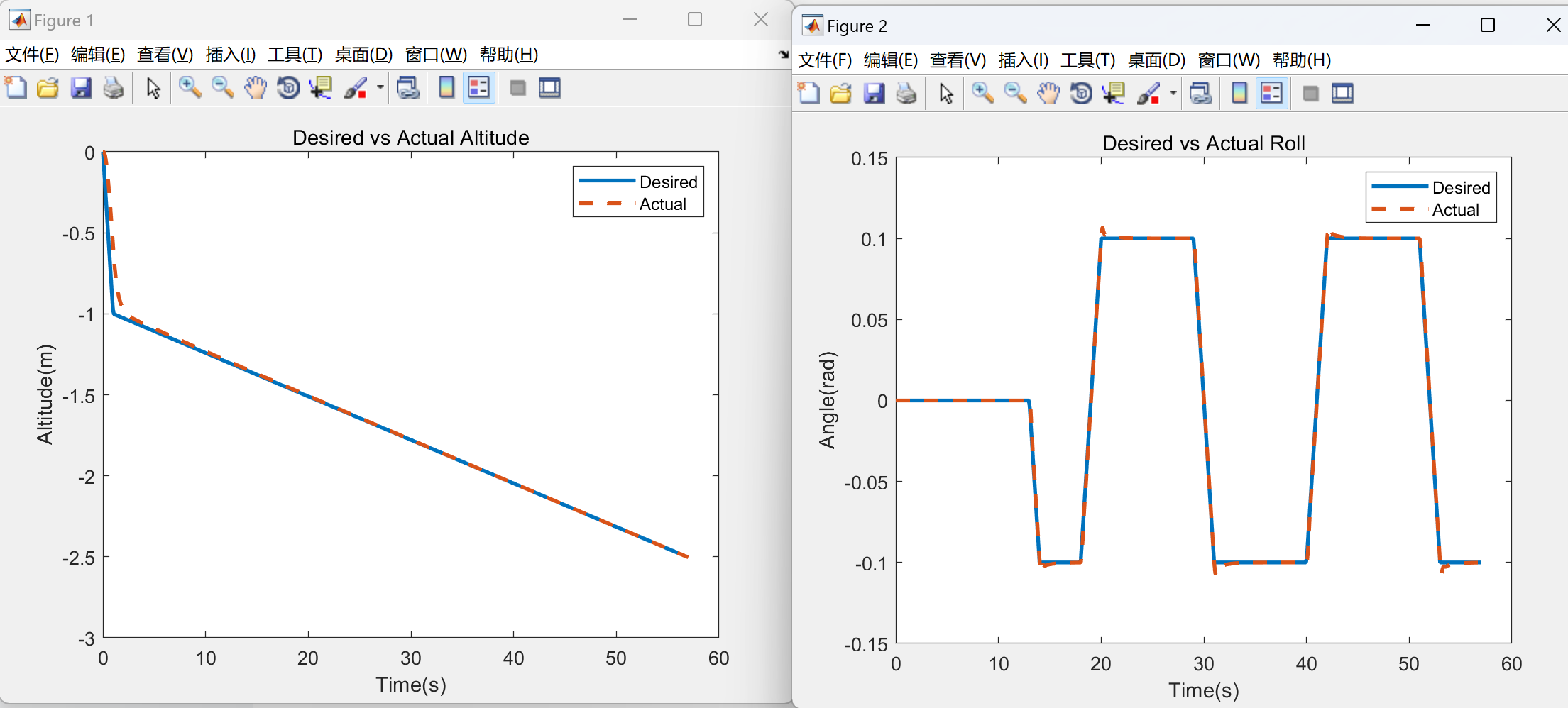
📚2 运行结果




部分代码:
% Quadrotor constants
Ixx = 7.5*10^(-3); % Quadrotor moment of inertia around X axis
Iyy = 7.5*10^(-3); % Quadrotor moment of inertia around Y axis
Izz = 1.3*10^(-2); % Quadrotor moment of inertia around Z axis
Ax=0.0;
Ay=0.0;
Az=0.0;
Jr = 6.5*10^(-7); % Total rotational moment of inertia around the propeller axis 6.5*10^(-6)
b = 1.144e-08; % Thrust factor
d = 9.94e-10; % Drag factor
l = 0.23; % Distance to the center of the Quadrotor
g = 9.81; % Gravitational acceleration
weight =.284; %kg Weight=mg (from a scale)
m = weight/g; % Mass of the Quadrotor in Kg
b_m=2.415e-6; %Motor damping
R=0.117; %Motor Resistance
L=0.001*R; %Electric Inductance
Kemf=0.00255; %Back electromotive force constant
Kt=Kemf;
C=700; %mAh
PD=120; %Peak Discharge
CD=60; %Constant Dishcharge
Amps=C/1000;
Operating_current=Amps*CD;
Max_current=Amps*PD;
Volts=11.1;
Gyro_bias=0;
Accel_bias=0;
Phi_dot_bias=0;
Theta_dot_bias=0;
Psi_dot_bias=0;
X_dot_dot_bias=0;
Y_dot_dot_bias=0;
Z_dot_dot_bias=0;
Grav_bias=g;
%set_param('Controlled_simulink_model_vectorized','AlgebraicLoopSolver','LineSearch')
sim('Controlled_simulink_model_vectorized')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]马松辉,吴成富,王鹏.基于Simulink的无人机空中地面一体化建模方法研究[J].系统仿真学报, 2011, 23(4):5.DOI:CNKI:SUN:XTFZ.0.2011-04-045.
[2]吕晓林,罗纯哲.无人机基于Matlab/Simulink仿真技术研究[J].宇航计测技术, 2011, 31(6):6.DOI:10.3969/j.issn.1000-7202.2011.06.008.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 518
518











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











