






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
一、UWB SLAM概述
-
背景与意义
-
在机器人导航与环境探索领域,同步定位与地图构建(SLAM)是关键技术。传统的激光雷达和摄像头作为SLAM传感器存在一些局限性,例如摄像头在光线不足时效果不佳,激光雷达成本较高等。超宽带(UWB)技术的出现为SLAM提供了新的解决方案。UWB具有高精度的测距能力、抗多径干扰能力强等优点,能够在复杂环境下实现有效的定位和地图构建,这在室内环境、工业场景、智能家居等领域具有重要意义。
-
-
研究目的
-
探索UWB技术在SLAM中的应用潜力,旨在克服传统传感器在特定环境下的不足,如在视觉拒止(低能见度、光线不足等)的室内环境中实现准确的定位与地图构建,同时减少对外部基础设施(如大量锚点设置)的依赖,提高系统的灵活性和自主性。
-
二、UWB技术基础
-
UWB工作原理
-
UWB通过发射超短脉冲信号,利用信号的飞行时间(ToF)来测量距离。这种测距方式精度较高,并且由于UWB信号的带宽很宽,其抗多径干扰能力较强。例如,在室内复杂环境中,反射信号较多,但UWB可以有效区分不同路径的信号,从而准确测量到目标的距离。
-
-
UWB在SLAM中的优势
-
与传统的激光雷达和摄像头相比,UWB具有独特的优势。在低可见度环境下,摄像头可能失效,而UWB不受光线影响。并且,相对于激光雷达,UWB设备的成本可能更低、功耗更小。此外,UWB信号能够穿透一些障碍物,这为在复杂室内环境(如存在部分遮挡物的环境)中的定位和地图构建提供了可能。
-
三、UWB SLAM系统架构
-
传感器配置
-
通常采用安装在机器人上的UWB收发器作为主要传感器。这种机载传感器的配置方式,使得机器人能够自主进行定位和地图构建,无需依赖大量的外部锚点。与传统的锚点 - 标签SLAM系统相比,减少了对环境基础设施改造的需求。引用自[1][2]。
-
-
数据融合与处理
-
在UWB SLAM系统中,可能会将UWB数据与其他传感器(如惯性测量单元IMU)的数据进行融合。例如,通过扩展卡尔曼滤波(EKF)等算法,将UWB的测距信息与IMU的姿态信息相结合,提高定位和地图构建的准确性。
-
四、UWB SLAM的关键技术与算法
-
地标检测与识别
-
利用UWB信号的特性来检测和识别环境中的地标。例如,可以通过分析UWB信号的反射特征,确定特殊的点或区域作为地标。同时,可能会采用一些算法来对检测到的地标进行筛选和优化,如基于噪声的应用程序密度基空间聚类(DBSCAN)算法来去除错误的观测值,提高地标识别的准确性。
-
-
定位与地图构建算法
-
后端通常采用如扩展卡尔曼滤波(EKF)SLAM算法来解决定位和地图构建问题。该算法能够根据UWB传感器的观测数据,不断更新机器人的位置估计和地图信息,从而实现在室内环境中映射自然点路标,并改善机器人定位。
-
五、UWB SLAM的实验与验证
-
实验环境设置
-
实验通常在各种室内环境中进行,包括有不同程度遮挡、不同布局结构以及存在干扰源(如电磁干扰、多径反射等)的环境。这样可以全面测试UWB SLAM系统在不同复杂条件下的性能。
-
-
性能评估指标
-
常用的性能评估指标包括定位精度(如与真实位置的偏差)、地图构建的准确性(如地图与实际环境的匹配程度)、系统的稳定性(如在长时间运行或复杂环境下的性能波动情况)等。通过这些指标,可以客观地评价UWB SLAM系统的优劣。
-
六、UWB SLAM的应用领域与前景
-
室内导航与定位
-
在大型商场、机场、仓库等室内场所,UWB SLAM可用于机器人导航、人员定位等应用。例如,为服务机器人提供准确的定位和导航信息,使其能够在复杂的室内环境中高效地完成任务,如货物搬运、环境清洁等。
-
-
智能家居与智能建筑
-
可应用于智能家居系统中,实现设备的定位与环境感知。例如,智能家具根据人的位置自动调整功能,或者对室内环境进行实时地图构建,为家庭安全监控等提供支持。在智能建筑方面,可以辅助建筑设施的管理与维护,如自动检测建筑物内设施的位置和状态。引用自。
-
📚2 运行结果
运行结果比较多,就不一一展示。
部分代码:
clear
close all
% load LOS data, ExperimentX
load ranges_exp1.mat
plot_hist = false;
plot_all = true;
n = size(r,1);
if n < 6
rows = 2;
else
rows = 3;
end
if plot_hist
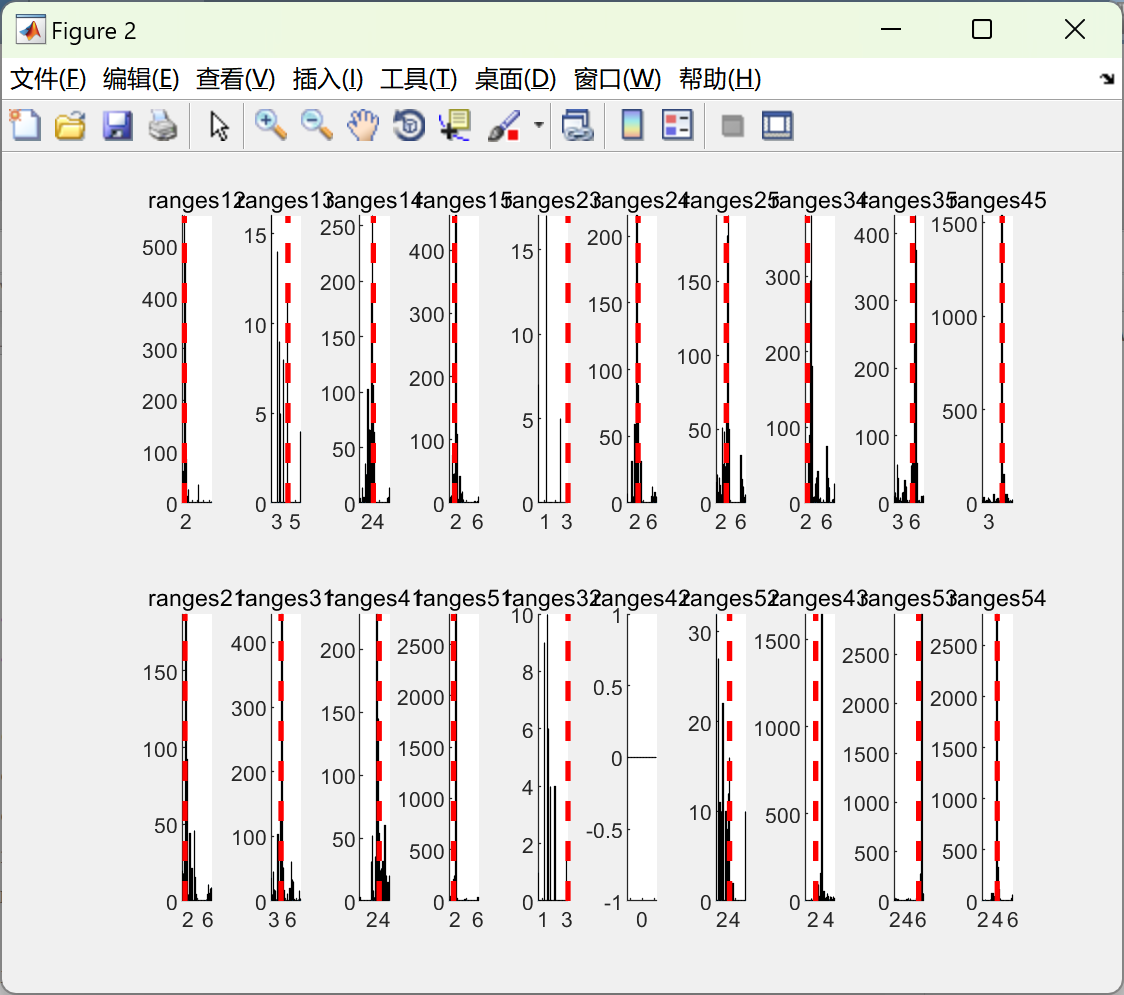
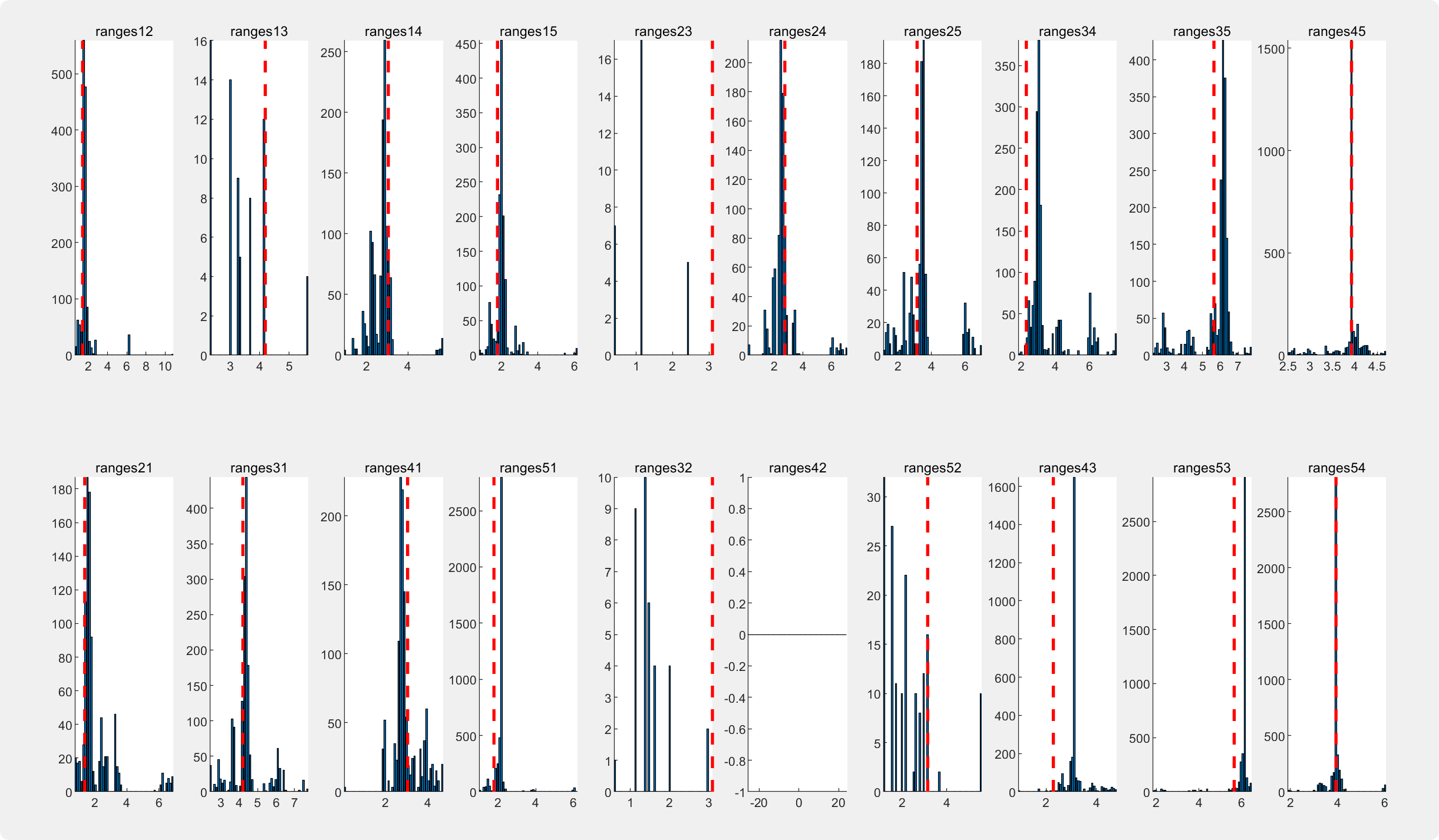
for i = 1 : n
subplot(rows,3,i)
nbins = round(sqrt(length(r(i,:))));
hist(r(i,:),nbins)
end
end
% prepare data with manual offset
offset = [0.3 -0.2 -0.5 -1 -1.45 -1.9 -2.2 -3.25 -3.75];
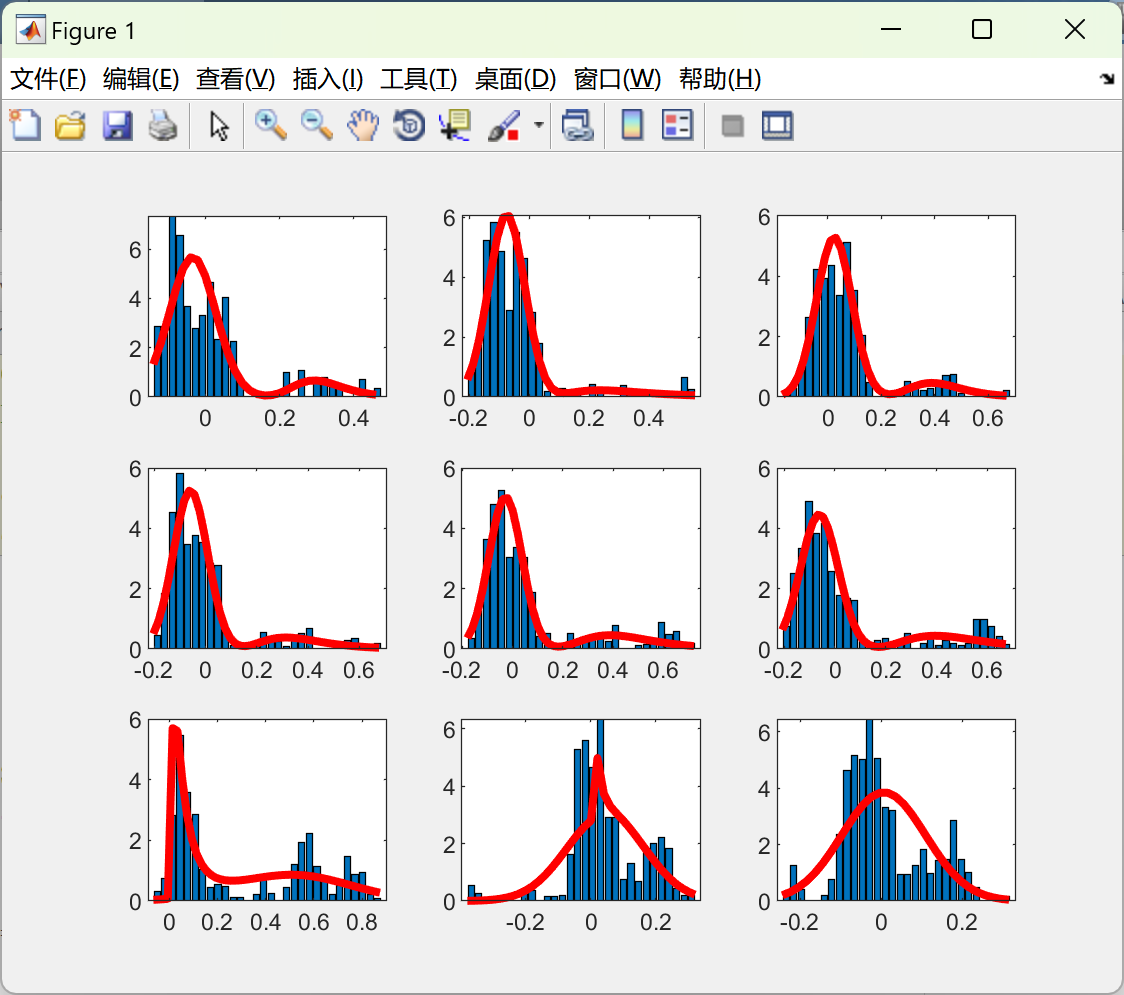
for i=1:n
fax = subplot(rows,3,i);
% since data is bad, we need to remove offsets, 0s, nans
data = r(i,:);
d0 = data(~isnan(data)) + offset(i);
d1 = d0((d0~=0));
d = d1(d1>-0.4);
max_iter = 100;
parX = f_batch_EM(max_iter, d);
if plot_all
ax = min(d):0.02:max(d);
% Plot data points
f_plot_datapoints(fax,d);
hold on;
% Estimated curve in red
f_plot_NormLogn(fax,ax,parX.m,parX.s,parX.w,'r');
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]夏磊.基于激光雷达和UWB的同时定位与地图构建算法的研究[D].黑龙江大学,2022.
[2]周韦,孙宪坤,吴飞.基于SLAM/UWB的室内融合定位算法研究[J].全球定位系统, 2022, 47(1):8.
[3]郑桂锋,徐浩恺,胡雄杰,等.联合UWB和IMU的矿井内实体定位及语义地图构建系统[J].电脑知识与技术, 2021(5):248-249+255.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取




















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











