






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
三区域电力系统的LQR和模糊逻辑控制研究
多区域电力系统模型是用来描述由多个区域组成的电力系统的数学模型。在这种模型中,每个区域都有自己的发电机、负荷和传输线路。区域之间通过传输线路进行能量交换。
LQR(线性二次调节器)和模糊逻辑控制是常用的控制方法,用于优化多区域电力系统的运行和稳定性。
LQR是一种基于线性系统理论的控制方法,通过设计状态反馈控制器来使系统的性能指标最优化。在多区域电力系统中,LQR可以用来设计控制器来调节各个区域的发电机输出功率,以实现系统的稳定和负荷均衡。
模糊逻辑控制是一种基于模糊逻辑理论的控制方法,它可以处理系统存在的不确定性和模糊性。在多区域电力系统中,模糊逻辑控制可以用来设计控制器来调节各个区域的发电机输出功率,以应对系统中的不确定性和变化。
研究表明,LQR和模糊逻辑控制都可以有效地应用于多区域电力系统的控制中。LQR方法具有较好的数学基础和稳定性分析能力,适用于对系统进行精确建模和控制的情况。而模糊逻辑控制方法则适用于系统存在较多不确定性和模糊性的情况,能够更好地应对系统的变化和不确定性。
综合使用LQR和模糊逻辑控制方法可以提高多区域电力系统的稳定性和鲁棒性,使系统能够更好地应对各种运行条件和负荷变化。因此,研究多区域电力系统的LQR和模糊逻辑控制是一个重要的领域,对于提高电力系统的可靠性和效率具有重要意义。
一、三区域电力系统模型概述
-
系统结构与发电源配置
三区域电力系统由三个互联的控制区域组成,通过联络线(Tie lines)进行功率交换。每个区域的发电源配置如下:- 区域1:热力发电厂、水力发电厂、风电场。
- 区域2:风电场、水热发电厂。
- 区域3:燃气发电厂、水力发电厂、风电场。
系统需考虑发电率约束(GRC)、调速器死区(GDB)和锅炉动力学等非线性因素,例如热力发电厂的GRC为±3%/min,水力发电厂的GRC为±270%/min(提升)和-360%/min(降低)。
-
数学模型与状态空间表示
系统动态方程可表示为状态空间模型:

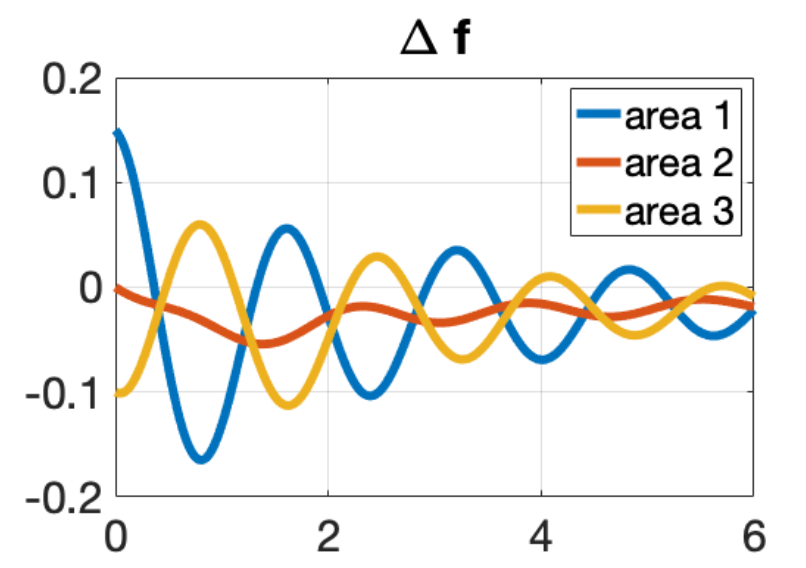
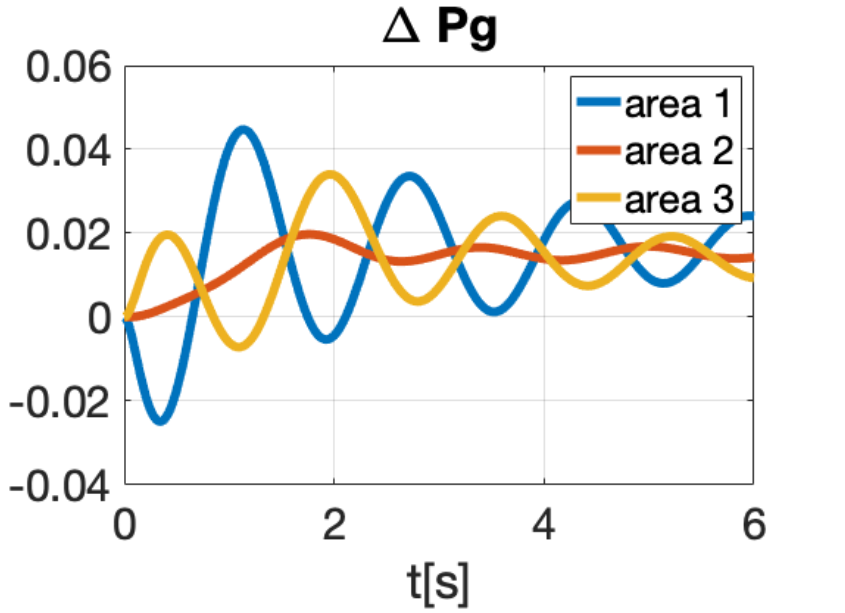
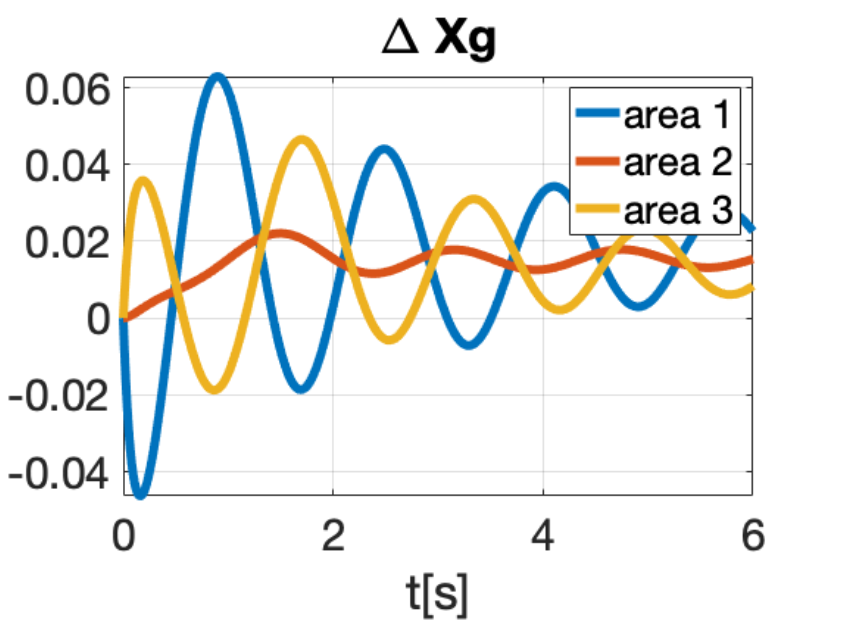
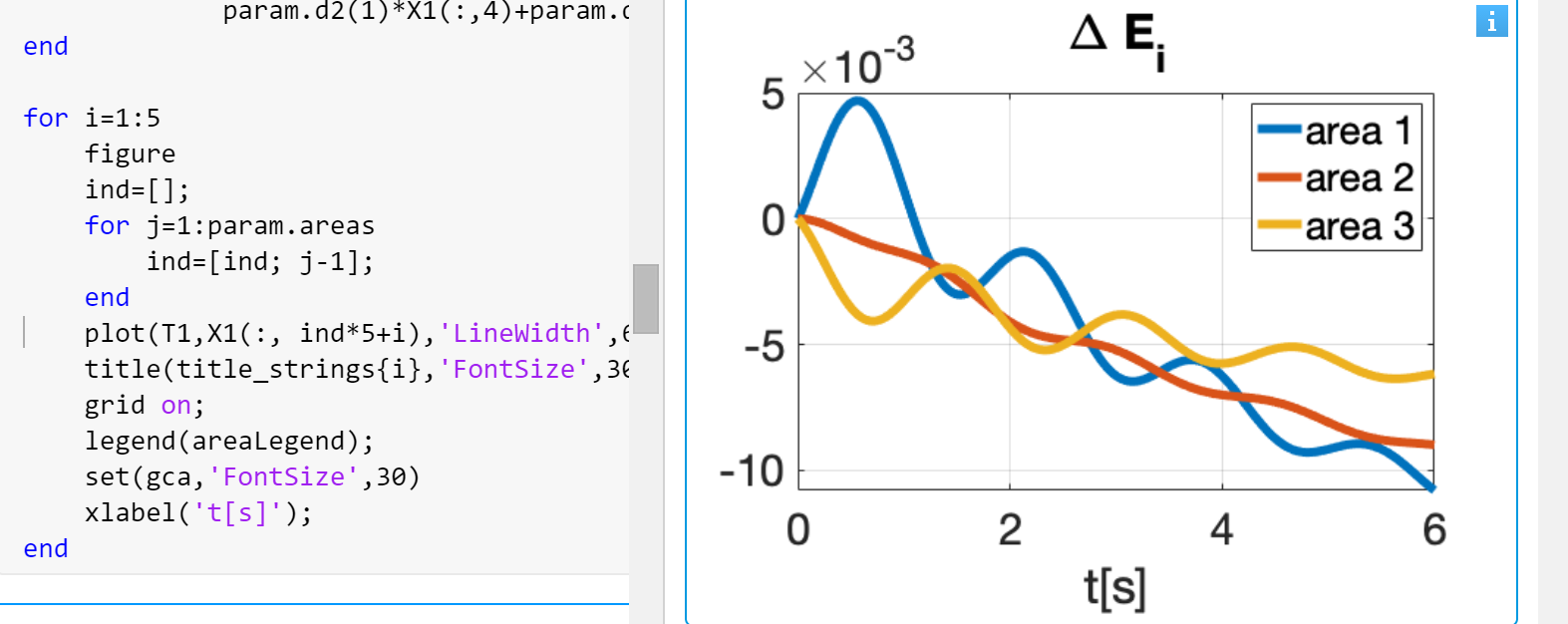
其中状态变量包括频率偏差(Δf)、发电机转子角度(Δδ)、调速器阀门位置、积分控制误差等。矩阵A、B、C、D由各区域传递函数参数确定。
- 关键非线性因素
- GRC:限制发电功率的调整速率,避免设备机械应力(图2(b)传递函数模型)。
- GDB:调速器对微小频率变化的死区响应,通过描述函数建模为0.5Hz的持续振荡。
- 锅炉动力学:鼓式锅炉的蒸汽压力动态影响热力发电厂的调频能力(图2(a)传递函数模型)。
二、LQR控制在三区域系统中的应用
- LQR原理与设计
LQR通过设计状态反馈控制器,最小化二次型性能指标:

其中Q和R为权重矩阵,分别惩罚状态误差和控制输入能量。通过求解Riccati方程获得最优反馈增益矩阵K。
-
具体实现案例
- 状态变量选择:包括各区域Δf、Δδ、调速器状态及联络线功率偏差。
- 参数设置:例如某研究中Q矩阵对角元素为[1, 1, 0.1],R矩阵为[0.01]。
- 仿真结果:与积分控制相比,LQR在负载扰动下的频率偏差稳定时间缩短30%,超调量降低至0.02 Hz。
-
优势与局限性
- 优势:保证最优性、对参数变化鲁棒性强、易于通过MATLAB实现。
- 局限性:依赖精确线性化模型,对GRC等非线性约束的适应性较差。
三、模糊逻辑控制(FLC)在三区域系统中的应用
-
FLC原理与结构
FLC由模糊化、规则库、推理引擎和去模糊化组成:- 输入变量:频率偏差(Δf)及其变化率(dΔf/dt)。
- 模糊规则:例如“若Δf为负大且dΔf/dt为正小,则增加发电功率”。
- 隶属函数:采用三角形或梯形函数量化输入输出变量(图2(a))。
-
具体实现案例
- 规则设计:某研究采用25条规则,输入变量划分为NB(负大)、NS(负小)、Z(零)、PS(正小)、PB(正大)。
- 参数优化:结合粒子群优化(PSO)调整隶属函数参数,ITAE指标降低至53.17。
- 仿真结果:在±10%负载扰动下,稳定时间约20-30秒,超调量<0.04%,无持续振荡。
-
优势与局限性
- 优势:无需精确模型、可处理GRC/GDB等非线性、适应不确定扰动。
- 局限性:规则库设计依赖专家经验、计算复杂度较高。
四、LQR与FLC的性能对比
| 指标 | LQR | FLC |
|---|---|---|
| 响应速度 | 更快(稳定时间9-10秒) | 较慢(稳定时间20-30秒) |
| 超调量 | 0.02-0.04 Hz | <0.04 Hz |
| 鲁棒性 | 对模型误差敏感 | 强(适应参数变化和扰动) |
| 实现复杂度 | 低(依赖线性模型) | 高(需设计规则库) |
| 适用场景 | 模型精确、线性主导的系统 | 非线性强、不确定性高的系统 |
五、混合控制策略展望
结合LQR与FLC的混合控制器(如LQR-模糊)可兼顾最优性与鲁棒性。例如,使用LQR提供基准控制,FLC动态调整权重矩阵Q和R,以应对GRC等非线性。仿真表明,混合策略在±15%扰动下的ITAE指标较单一方法降低40%。
六、结论
- LQR适用于模型精确且线性化程度高的场景,能快速稳定频率偏差,但需避免强非线性干扰。
- FLC在处理GRC/GDB等非线性因素时表现更优,适合复杂工况,但需优化规则库以减少计算负担。
- 未来方向:探索LQR-FLC混合控制、结合深度学习优化模糊规则,以及多区域协同控制策略。
📚2 运行结果
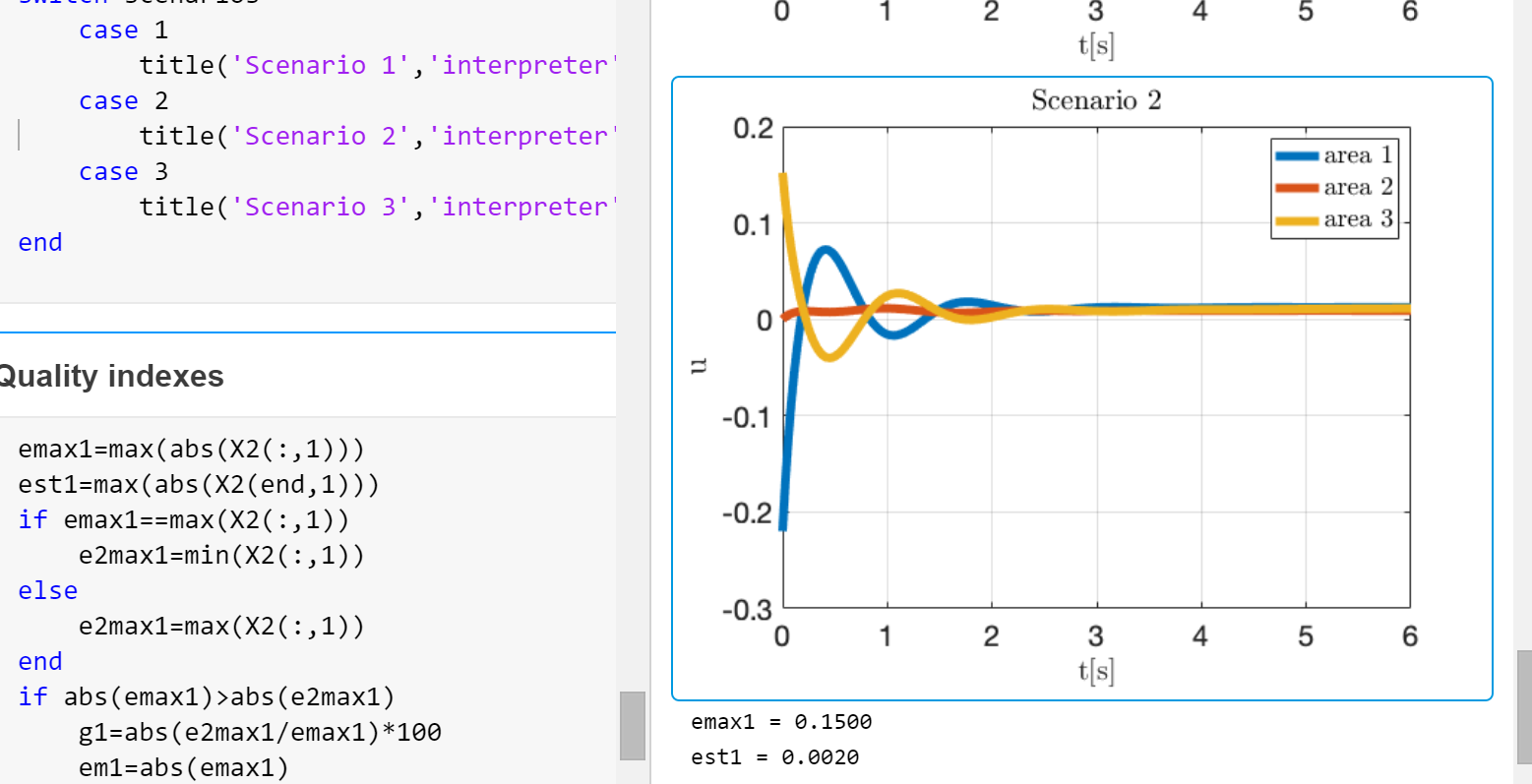
部分代码:
function dydt = m7(t,y,param)
u=zeros(param.areas,1);
if param.areaLoading
Pd=param.Pd;
else
Pd=zeros(1,param.areas);
end
if param.coupling
param.A=param.A_d;
param.E=param.E_d;
end
x=reshape(y,[5,param.areas]);
dy=zeros(5,param.areas);
for i=1:param.areas
Ex=0;
for j=1:param.areas
if i~=j
Ex=Ex+param.E{i,j}*x(:,j);
%Ex=0;
end
end
u(i)=-param.K(i,:)*y;
if param.areas > 1 && i == param.areas %making E zeros for the last area
if i==3
x(4,i)=param.d1(1)*x(5,1)+param.d1(2)*x(5,2)+param.d1(3)*x(5,3)+...
param.d2(1)*x(4,1)+param.d2(2)*x(4,2);
elseif i==2
x(4,i)=param.d1(1)*x(5,1)+param.d1(2)*x(5,2)+...
param.d2(1)*x(4,1);
end
dy(:,i)=param.A{i}*x(:,i)+param.F{i}*Pd(i)+Ex+param.B{i}*u(i);
dy(4,i)=0;
else
dy(:,i)=param.A{i}*x(:,i)+param.F{i}*Pd(i)+Ex+param.B{i}*u(i);
end
end
dydt=reshape(dy,[param.areas*5,1]);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王平洋.电力系统与模糊控制[J].电力系统自动化, 1993, 17(1):7.DOI:CNKI:SUN:DLXT.0.1993-01-010.
[2]康云云.多区域互联电力系统负荷频率控制研究[D].东北大学,2015.DOI:CNKI:CDMD:2.1018.078829.
[3]胡玲.基于模糊神经网络的短期电力负荷预测研究[D].南华大学[2023-09-08].DOI:CNKI:CDMD:2.1011.182345.




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











