






 本文讲述了使用STM32F103微控制器配合串口转422模块进行RS485通信的实验过程,介绍了上位机和下位机的代码实现,以及接线注意事项。实验仅实现单向数据传输,后续将扩展为双向通信。
本文讲述了使用STM32F103微控制器配合串口转422模块进行RS485通信的实验过程,介绍了上位机和下位机的代码实现,以及接线注意事项。实验仅实现单向数据传输,后续将扩展为双向通信。
流放吉林做项目,项目需求中需要用RS485通信协议,又因为买的串口转485模块没到,就先拿422的模块实验一下; 本人也是初次接触,仅实现了数据传输的功能,欢迎大佬指正;
实验设备
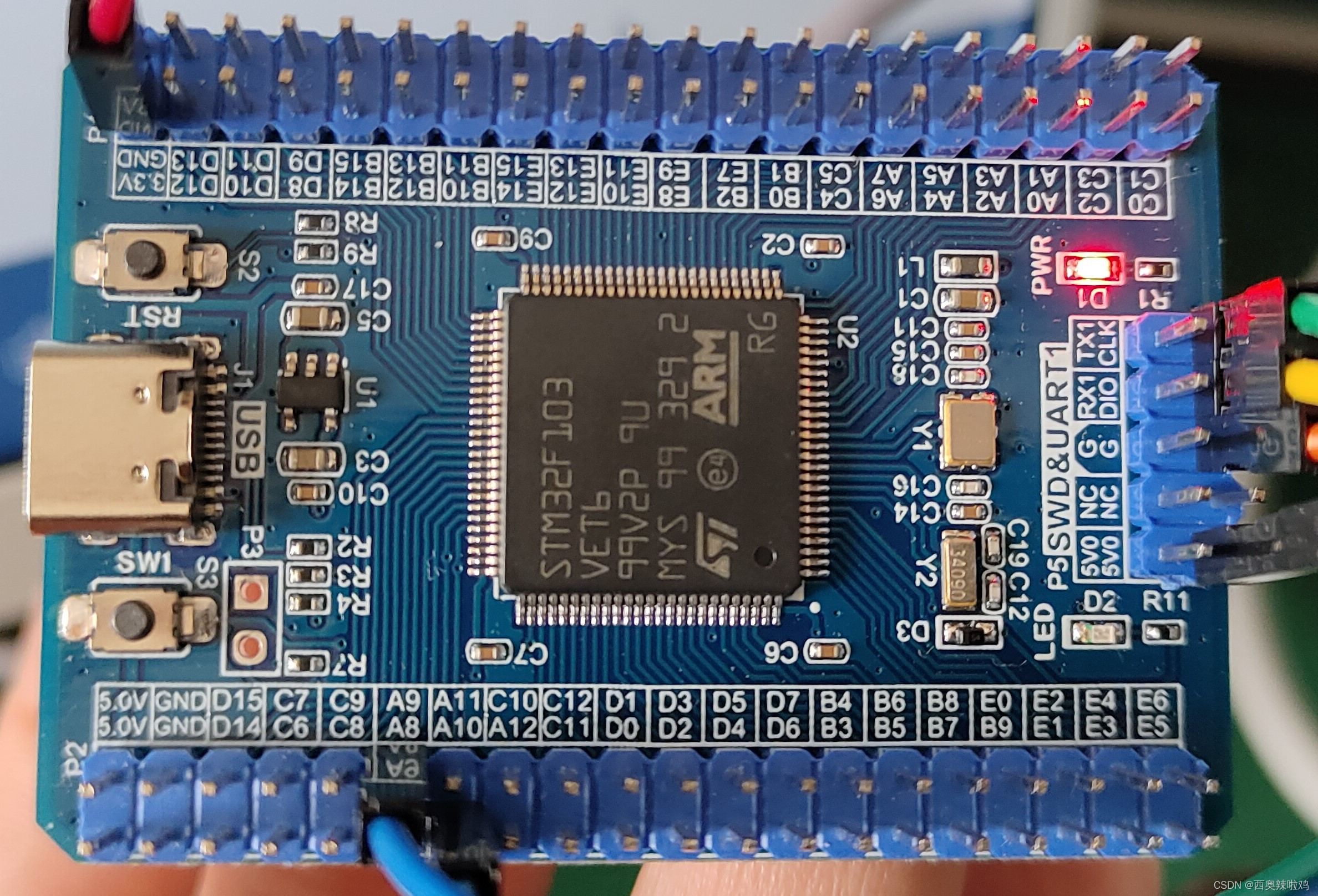
上位机:STM32F103VET6
下位机:STM32F103ZET6

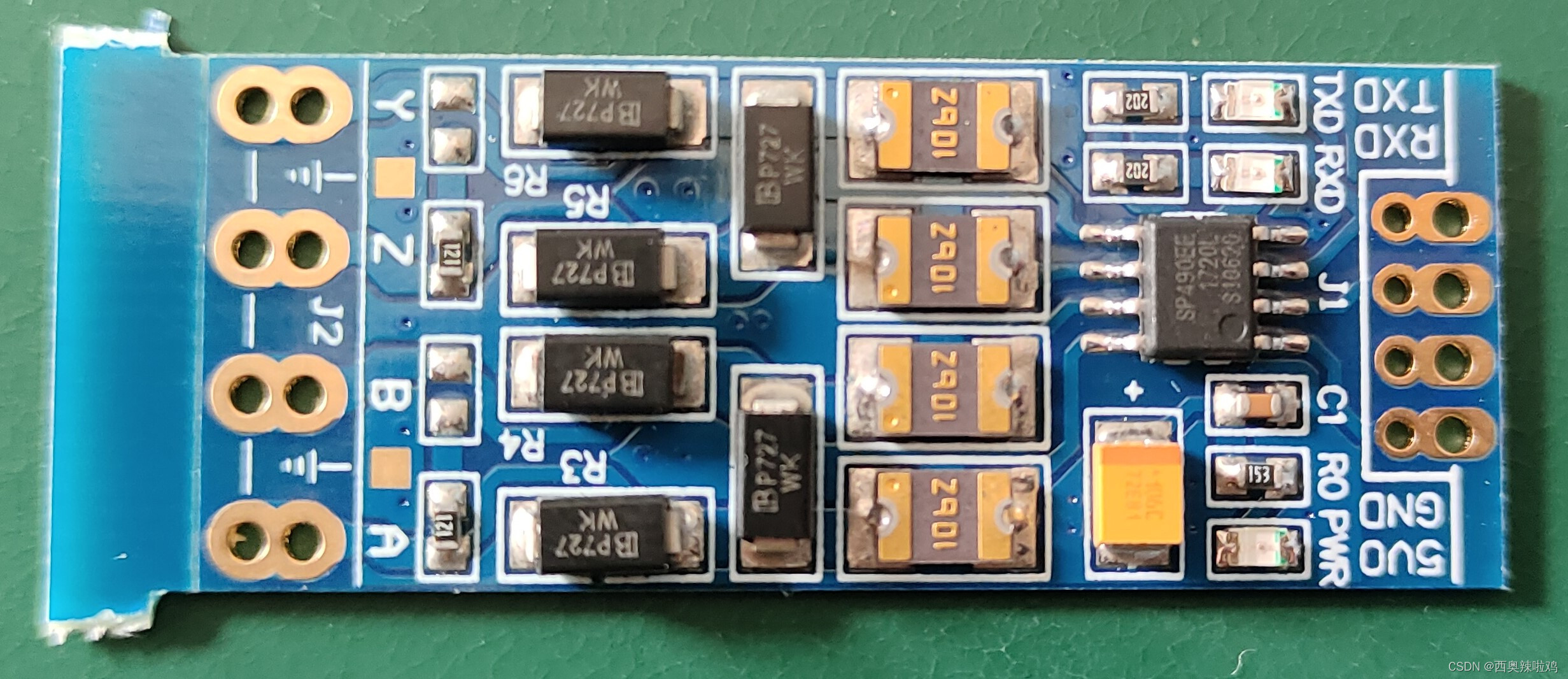
串口转422模块:
CH340模块:

接线部分
上位机和下位机都是使用的UART1的资源来进行收发的;
上位机代码部分
main.c代码部分:
#include "stm32f10x.h" // Device header
#include <DELAY.H>
#include "adc.h"
#include <LED.h>
#include <UART.H>
#include <SERIAL2.H>
float dat=0.00;
uint16_t temp = 0;
uint8_t RxData;
int main(void)
{
LED_INIT();
adc_init();
Serial_Init();
Serial_Printf("system init end\r\n");
while(1)
{
if (Serial_GetRxFlag() == 1)//串口接受标志位
{
RxData = Serial_GetRxData();
Serial_SendByte(RxData);
//Serial2_Printf("接收:%d \r\n",RxData);
}
Delay_ms(1000);
}
}
此处的逻辑是,当我们检测到串口1的接收标志位置1之后,直接将接收的数据通过TX引脚发送出去;
USART.C代码:
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
Serial_RxData = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
//Serial_SendByte(Serial_RxData);
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
这里对于UART1的配置为常用的N81,就是无校验位、8个数据位、一个停止位、波特率为9600;还有对于串口中断和串口输出的配置;
USART.h代码:
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
#endif
下位机代码部分:
下位机的代码和上位机类似,主要区别是上位机接收数据,下位机发送数据,发送数据一直在进行;
main.c代码:
#include "stm32f10x.h" // Device header
#include <DELAY.H>
#include <USART.H>
#include "adc.h"
#include "key.h"
float dat=32.614;
uint16_t temp = 0;
uint32_t test = 32614;
u8 KEY_val;
uint8_t byte_buff[5]={3,2,6,1,4};
u8 RxData;
int main(void)
{
adc_init();
Serial_Init();
KEY_Init();
LED_Init();
Serial_Printf("system init end\r\n");
while(1)
{
//Serial_SendArray(byte_buff,5);
//Serial_SendNumber(test,5);
Serial_SendByte(9);
Delay_ms(1000);
}
}
在while循环里可选择我们发送的数据类型,主要是看serial函数的类型;
USART.C代码:
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
Serial_RxData = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
USART.h代码:
#ifndef UART_H_
#define UART_H_
#include "stm32f10x.h"
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
#endif
注意事项:
注意看接线部分,给422模块供电我是直接用的单片机上的3.3v进行供电的;
主要考虑两点,第一点是:如果直接给5V供电会不会对单片机有影响甚至烧坏;
第二点是,422的标准其实是物理层的也可以说是电气协议,是因为,在长距离通信的过程中直接用串口通信是不能够完成通信的;而我们在做实验的过程中接线距离很短,所以说3.3v已经够用了;
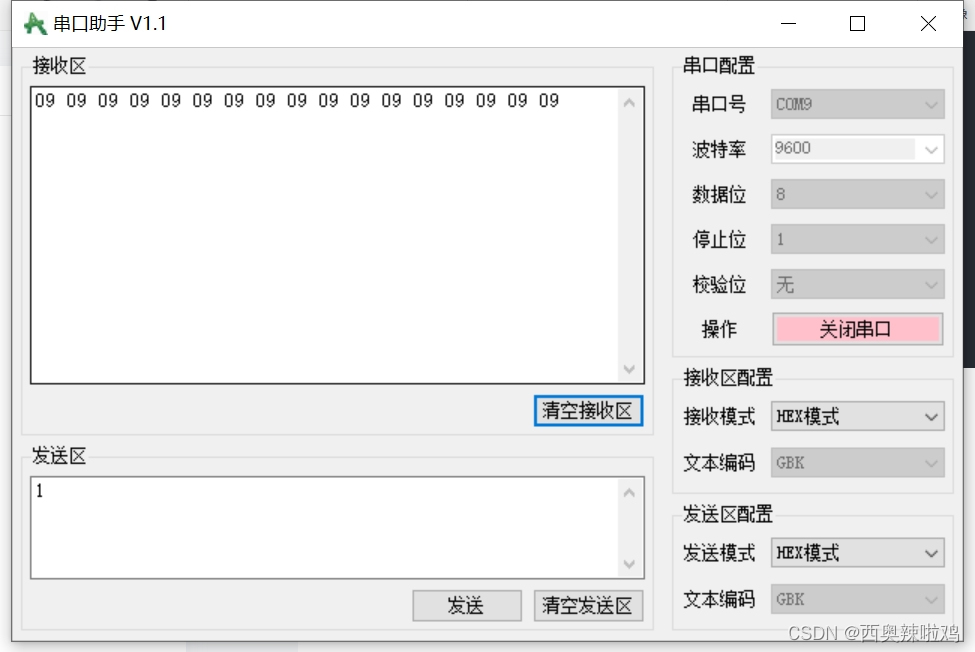
在本实验中我只完成了下位机发数据给上位机,上位机将数据发送给串口助手在电脑上显示;这个通信是单向的,只完成了下位机向上位机传输数据;(在本实验中,其实也可以说没有上位机和下位机,但是后面会在此基础之上,完成双向通信加上一些操作,才是真正的上位机和下位机;会面会继续更新);
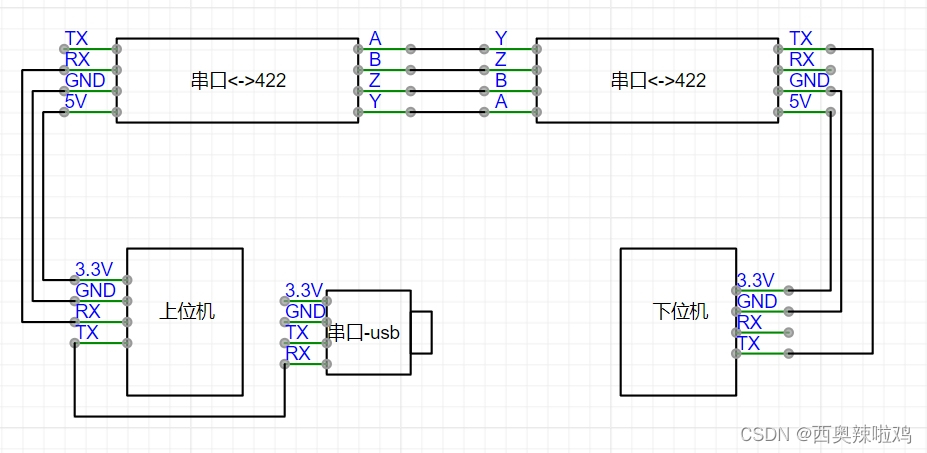
最重要的一点,就是接线的问题,参考界限部分的图片和下图;
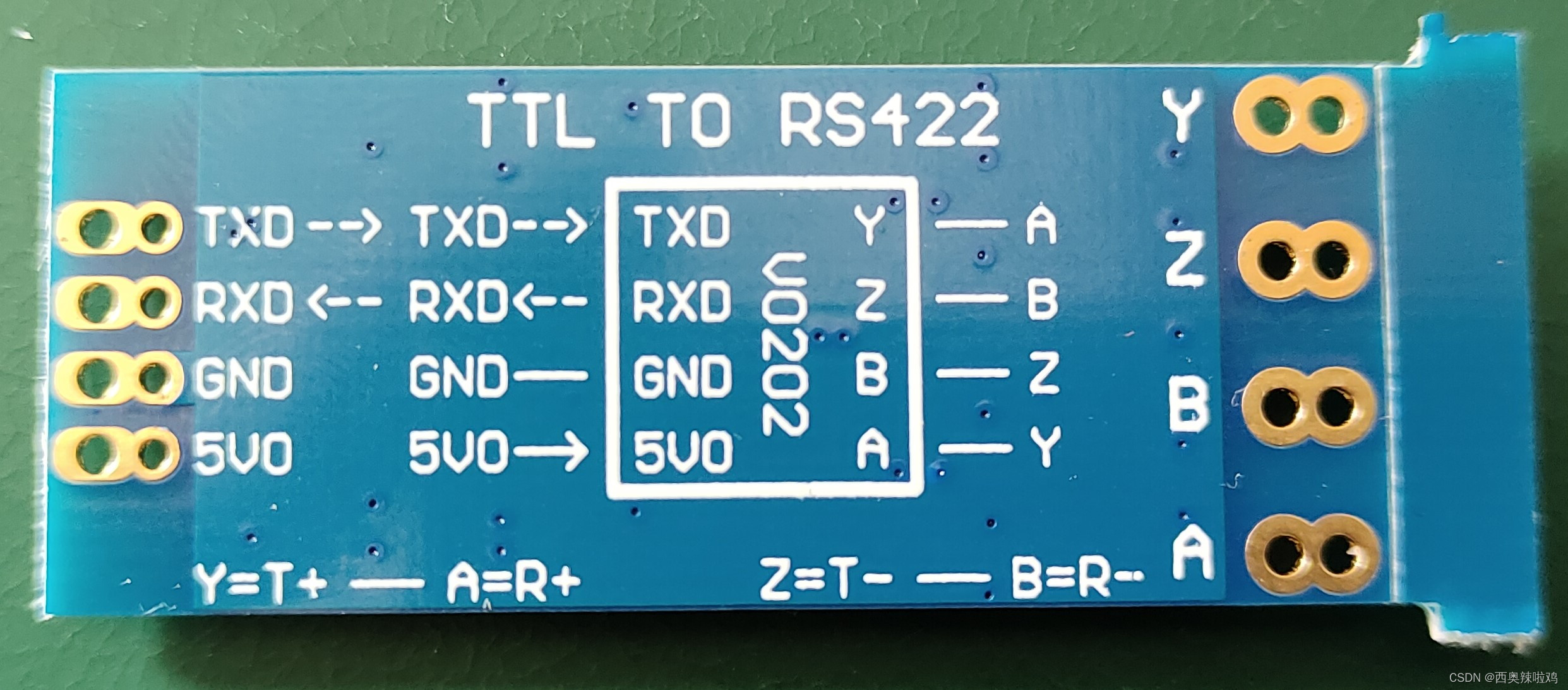
在ch340模块那里:串口的tx接ch340的rx;而单片机接422模块的时候就是,rx接rx、tx接tx;
还有,在422模块之间的接线如上图所示:A接Y、B接Z、Z接B、Y接A; (电源线和地线一定不要接反了,轻则芯片烧坏,还有可能烫伤自己)!!!!
实验现象
完整工程:
链接:链接:https://pan.baidu.com/s/1unAzQCu_NSIuSoq6qmfTNg
提取码:xq21


















 703
703

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









