






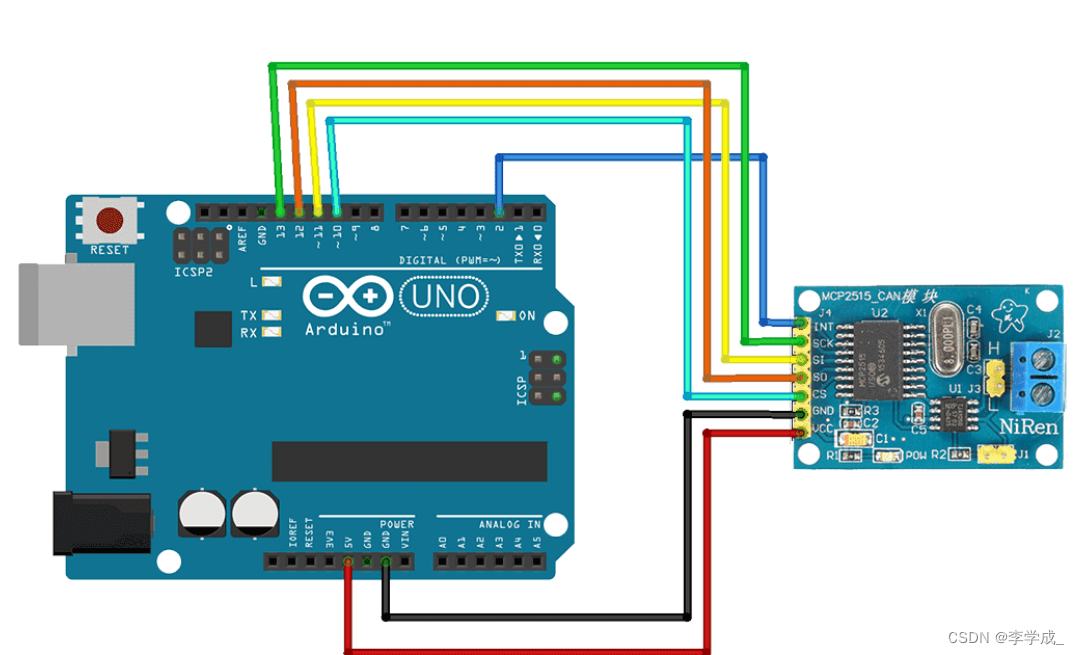
接线图细节:
上代码:
#include <SPI.h>
#include <mcp_can.h>
// 设置 CAN RX 和 TX 引脚
#define CAN_CS 10
MCP_CAN CAN(CAN_CS);
void setup() {
Serial.begin(115200);
while (!Serial) {}
// 在 1000kbps 下初始化 CAN 总线
if (CAN.begin(MCP_ANY, CAN_1000KBPS, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN 总线初始化成功!");
} else {
Serial.println("CAN 总线初始化失败。");
while (1);
}
}
void printHex2(uint8_t val) {
if (val < 16) {
Serial.print("0");
}
Serial.print(val, HEX);
}
void loop() {
// 构造要发送的CAN数据包
unsigned long id = 0x141; // 设置电机ID为0x141
uint8_t len = 8; // 数据长度为8字节
uint8_t buf[] = {0xA4, 0x00, 0x78, 0x00, 0x50, 0x46, 0x00, 0x00}; // 数据内容
// 发送CAN数据包
CAN.sendMsgBuf(id, 0, len, buf);
// 输出发送的数据到串口
Serial.print("发送数据:ID=0x");
Serial.print(id, HEX);
Serial.print(" 数据:");
for (int i = 0; i < len; i++) {
printHex2(buf[i]);
Serial.print(" ");
}
Serial.println();
// 等待一段时间,可以根据需要调整
delay(1000);
// 检查是否有CAN消息接收
if (CAN.checkReceive()) {
// 获取CAN消息
unsigned long rxId;//记录接收到的CAN消息的ID
uint8_t len; // 数据包的长度由len变量表示
uint8_t rxBuf[8]; // 最大支持8字节长度,如果实际长度可能超过8字节,需根据实际情况调整
CAN.readMsgBuf(&rxId, &len, rxBuf);
// 输出接收到的数据到串口
Serial.print("接收数据:ID=0x");
Serial.print(rxId, HEX);
Serial.print(" 数据:");
for (int i = 0; i < len; i++) {
printHex2(rxBuf[i]);
Serial.print(" ");
}
Serial.println();
}
}
串口显示页面:
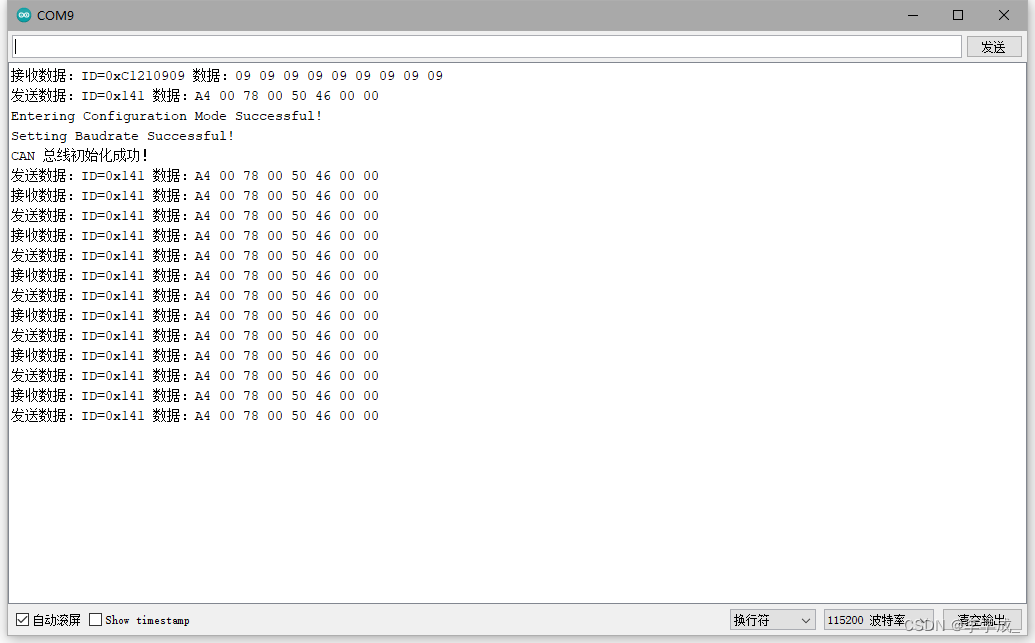
完成Arduino uno R3与MCP2515 之间的can协议的收发功能
但是外接的电机通过CAN无法通讯发送。。。
















 2594
2594











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









