







目录
前言:
ESP32的IDF配置方式与STM32库函数类似,由于有STM32的基础ESP32的文章将以代码实例为主,不再讲解理论知识。(更多教程还在持续学习更新中。。。。。。。。。)
API中对IO口的定义
typedef enum {
GPIO_NUM_NC = -1, /*!< Use to signal not connected to S/W */
GPIO_NUM_0 = 0, /*!< GPIO0, input and output */
GPIO_NUM_1 = 1, /*!< GPIO1, input and output */
GPIO_NUM_2 = 2, /*!< GPIO2, input and output */
GPIO_NUM_3 = 3, /*!< GPIO3, input and output */
GPIO_NUM_4 = 4, /*!< GPIO4, input and output */
GPIO_NUM_5 = 5, /*!< GPIO5, input and output */
GPIO_NUM_6 = 6, /*!< GPIO6, input and output */
GPIO_NUM_7 = 7, /*!< GPIO7, input and output */
GPIO_NUM_8 = 8, /*!< GPIO8, input and output */
GPIO_NUM_9 = 9, /*!< GPIO9, input and output */
GPIO_NUM_10 = 10, /*!< GPIO10, input and output */
GPIO_NUM_11 = 11, /*!< GPIO11, input and output */
GPIO_NUM_12 = 12, /*!< GPIO12, input and output */
GPIO_NUM_13 = 13, /*!< GPIO13, input and output */
GPIO_NUM_14 = 14, /*!< GPIO14, input and output */
GPIO_NUM_15 = 15, /*!< GPIO15, input and output */
GPIO_NUM_16 = 16, /*!< GPIO16, input and output */
GPIO_NUM_17 = 17, /*!< GPIO17, input and output */
GPIO_NUM_18 = 18, /*!< GPIO18, input and output */
GPIO_NUM_19 = 19, /*!< GPIO19, input and output */
GPIO_NUM_20 = 20, /*!< GPIO20, input and output */
GPIO_NUM_21 = 21, /*!< GPIO21, input and output */
GPIO_NUM_26 = 26, /*!< GPIO26, input and output */
GPIO_NUM_27 = 27, /*!< GPIO27, input and output */
GPIO_NUM_28 = 28, /*!< GPIO28, input and output */
GPIO_NUM_29 = 29, /*!< GPIO29, input and output */
GPIO_NUM_30 = 30, /*!< GPIO30, input and output */
GPIO_NUM_31 = 31, /*!< GPIO31, input and output */
GPIO_NUM_32 = 32, /*!< GPIO32, input and output */
GPIO_NUM_33 = 33, /*!< GPIO33, input and output */
GPIO_NUM_34 = 34, /*!< GPIO34, input and output */
GPIO_NUM_35 = 35, /*!< GPIO35, input and output */
GPIO_NUM_36 = 36, /*!< GPIO36, input and output */
GPIO_NUM_37 = 37, /*!< GPIO37, input and output */
GPIO_NUM_38 = 38, /*!< GPIO38, input and output */
GPIO_NUM_39 = 39, /*!< GPIO39, input and output */
GPIO_NUM_40 = 40, /*!< GPIO40, input and output */
GPIO_NUM_41 = 41, /*!< GPIO41, input and output */
GPIO_NUM_42 = 42, /*!< GPIO42, input and output */
GPIO_NUM_43 = 43, /*!< GPIO43, input and output */
GPIO_NUM_44 = 44, /*!< GPIO44, input and output */
GPIO_NUM_45 = 45, /*!< GPIO45, input and output */
GPIO_NUM_46 = 46, /*!< GPIO46, input and output */
GPIO_NUM_47 = 47, /*!< GPIO47, input and output */
GPIO_NUM_48 = 48, /*!< GPIO48, input and output */
GPIO_NUM_MAX,
} gpio_num_t;初始化函数
初始化函数与STM32的库函数配置方式类似,使用 gpio_config()函数进行初始化。
esp_err_t gpio_config(const gpio_config_t *pGPIOConfig)GPIO结构体指针
typedef struct {
uint64_t pin_bit_mask; /*!< GPIO pin: set with bit mask, each bit maps to a GPIO */
gpio_mode_t mode; /*!< GPIO mode: set input/output mode */
gpio_pullup_t pull_up_en; /*!< GPIO pull-up */
gpio_pulldown_t pull_down_en; /*!< GPIO pull-down */
gpio_int_type_t intr_type; /*!< GPIO interrupt type */
#if SOC_GPIO_SUPPORT_PIN_HYS_FILTER
gpio_hys_ctrl_mode_t hys_ctrl_mode; /*!< GPIO hysteresis: hysteresis filter on slope input */
#endif
} gpio_config_t;关于各个参数的说明:
/*
*中断配置*.intr_type/ GPIO_INTR_DISABLE /失能中断
/ GPIO_INTR_POSEDGE /上升沿
/ GPIO_INTR_NEGEDGE /下降沿
/ GPIO_INTR_ANYEDGE /上升沿和下降沿中断
/ GPIO_INTR_LOW_LEVEL /输入低电平触发
/ GPIO_INTR_HIGH_LEVEL /输入高电平触发
****************************************************************
*引脚模式*.mode / GPIO_MODE_DISABLE /失能输入输出模式
/ GPIO_MODE_INPUT /仅输入模式
/ GPIO_MODE_OUTPUT /仅输出模式
/ GPIO_MODE_OUTPUT_OD /输出开漏模式
/ GPIO_MODE_INPUT_OUTPUT_OD /输入输出开漏模式
/ GPIO_MODE_INPUT_OUTPUT /输入输出模式
****************************************************************
*配置上拉*.pull_up_en / GPIO_PULLUP_DISABLE /失能上拉
/ GPIO_PULLUP_ENABLE /使能上拉
****************************************************************
*配置下拉*.pull_down_en / GPIO_PULLDOWN_DISABLE /失能上拉
/ GPIO_PULLDOWN_ENABLE /使能上拉
****************************************************************
*引脚位 *.pin_bit_mask / (1 << x)其中x为ESP32S3中可用GPIO /设置的引脚位,比如本实验用到的IO1引脚,则写为: (1ull << GPIO_NUM_1)
****************************************************************
*其他* / GPIO_PULLUP_ONLY /仅上拉
/ GPIO_PULLDOWN_ONLY /仅下拉
/ GPIO_PULLUP_PULLDOWN /上拉+下拉
/ GPIO_FLOATING /浮空
*/实例
IO进行输出初始化函数实例:
void led_init(void)
{
gpio_config_t gpio_init_struct = {0}; //声明结构体
gpio_init_struct.intr_type = GPIO_INTR_DISABLE; /* 失能引脚中断 */
gpio_init_struct.mode = GPIO_MODE_INPUT_OUTPUT; /* 输入输出模式 */
gpio_init_struct.pull_up_en = GPIO_PULLUP_ENABLE; /* 使能上拉 */
gpio_init_struct.pull_down_en = GPIO_PULLDOWN_DISABLE; /* 失能下拉 */
gpio_init_struct.pin_bit_mask = 1ull << GPIO_NUM_1; /* 设置的引脚的位掩码 */
gpio_config(&gpio_init_struct); /* 配置GPIO */
}IO进行输入初始化函数实例:
void key_init(void)
{
gpio_config_t gpio_init_struct;
gpio_init_struct.intr_type = GPIO_INTR_DISABLE; /* 失能引脚中断 */
gpio_init_struct.mode = GPIO_MODE_INPUT; /* 输入模式 */
gpio_init_struct.pull_up_en = GPIO_PULLUP_ENABLE; /* 使能上拉 */
gpio_init_struct.pull_down_en = GPIO_PULLDOWN_DISABLE; /* 失能下拉 */
gpio_init_struct.pin_bit_mask = 1ull << BOOT_GPIO_PIN; /* BOOT按键引脚 */
gpio_config(&gpio_init_struct); /* 配置使能 */
} 设置IO口输出电平:
原型函数:
esp_err_t gpio_set_level(gpio_num_t gpio_num, uint32_t level);
/*
gpio_num /GPIO引脚号。(在gpio_types.h文件中枚举gpio_num_t有定义)
level /GPIO引脚输出电平。0:低电平,1:高电平
*/
*****************************************************************
实例:
gpio_set_level(GPIO_NUM_1, 1) :
vTaskDelay(500);
gpio_set_level(GPIO_NUM_1, 0);
获取IO口当前电平:
原型函数:
esp_err_t gpio_get_level(gpio_num_t gpio_num);
/*
gpio_num /GPIO引脚号。(在gpio_types.h文件中枚举gpio_num_t有定义)
返回值:ESP_OK表示获取成功,ESP_FAIL表示获取失败。
*/
******************************************************************
实例:
KEY=gpio_get_level(GPIO_NUM_1)
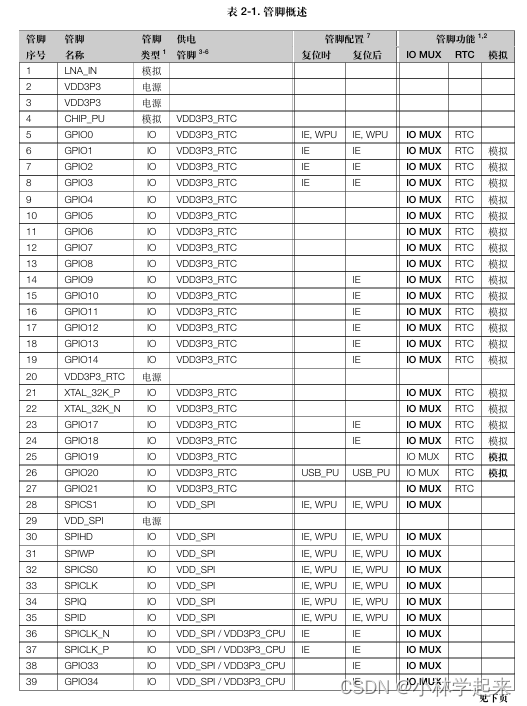
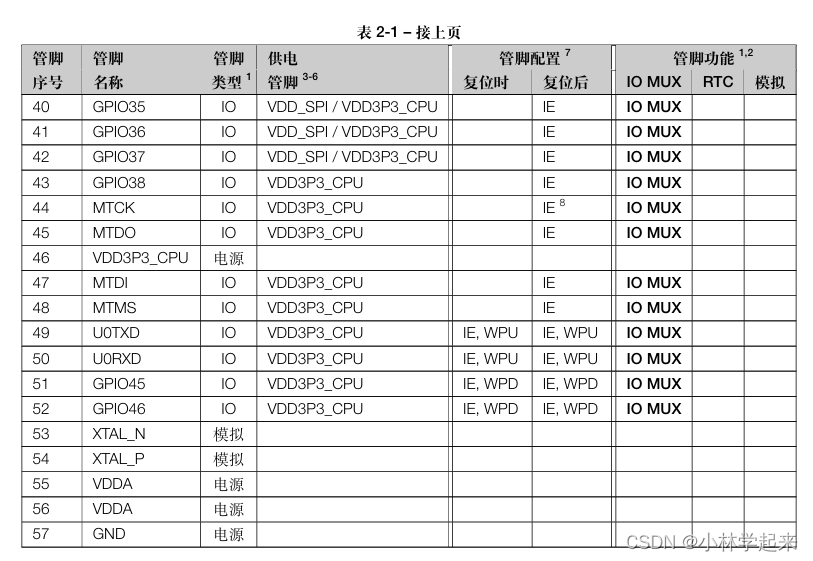
官方截图的引脚表格
IO口一览表:
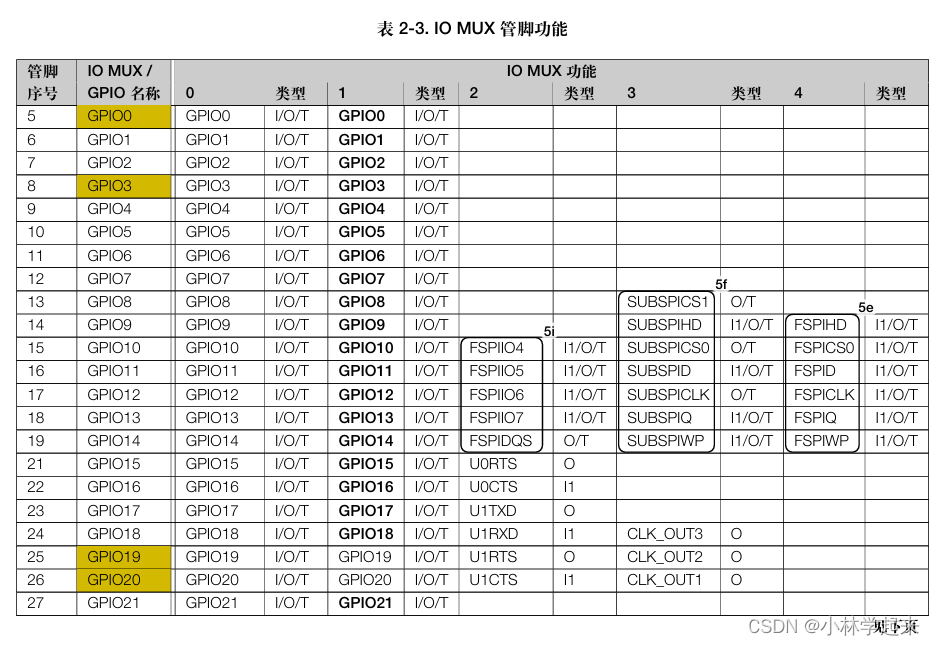
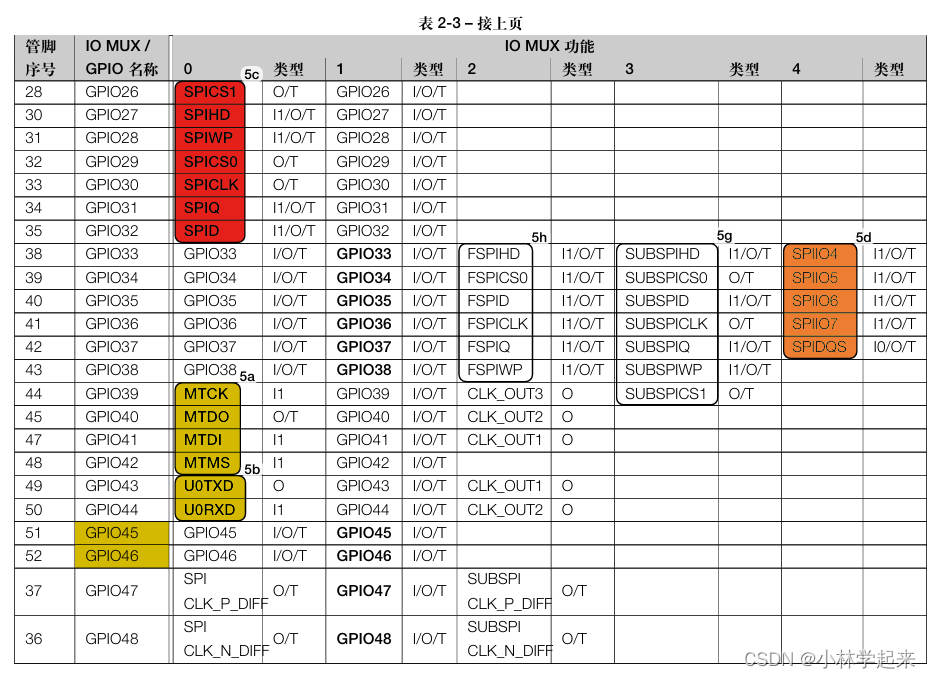
IO MUX管脚功能一览表(功能编程主要看这个):
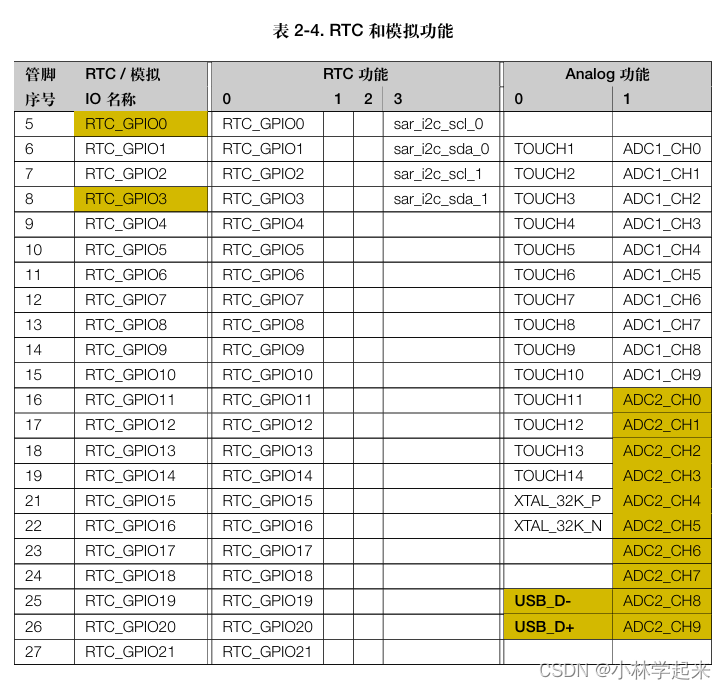
RTC和模拟功能IO口一览表(ADC与低功耗编程看这个):
 参考文件:
参考文件:


















 1628
1628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









