







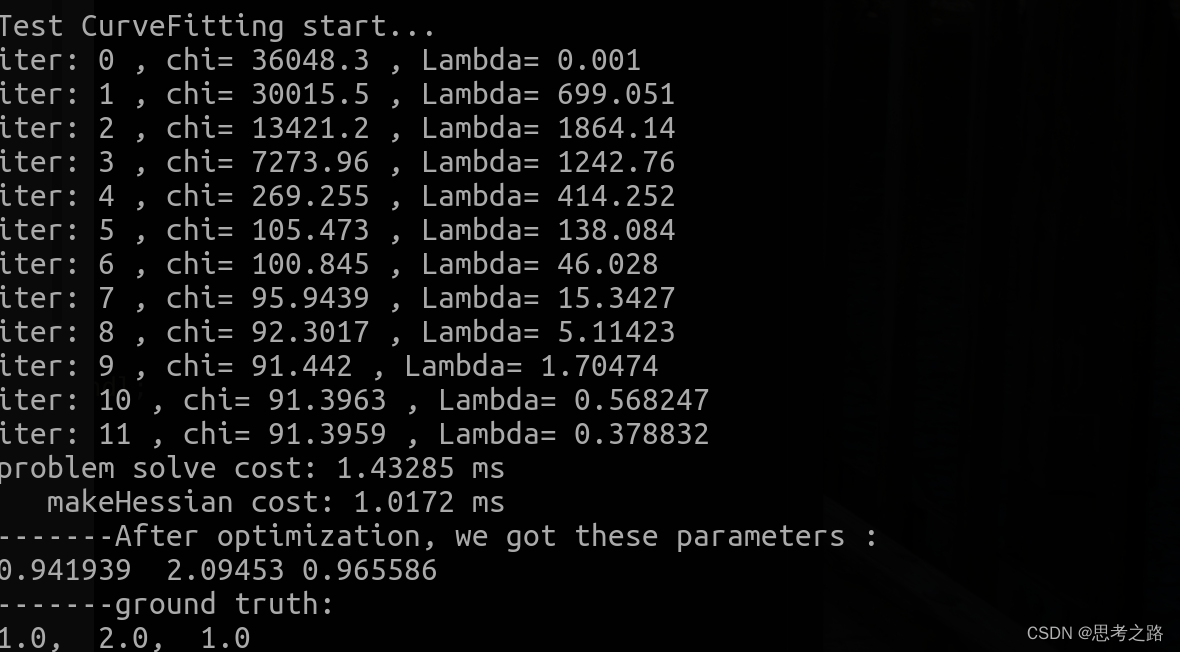
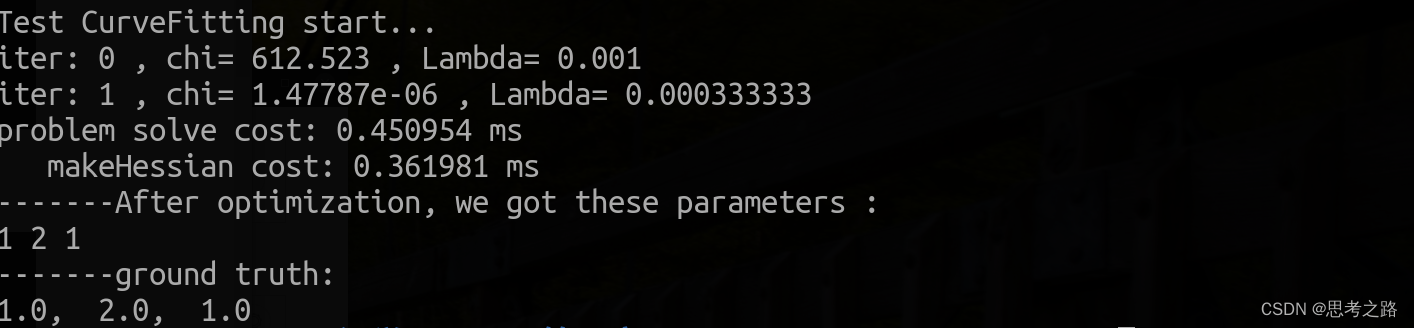
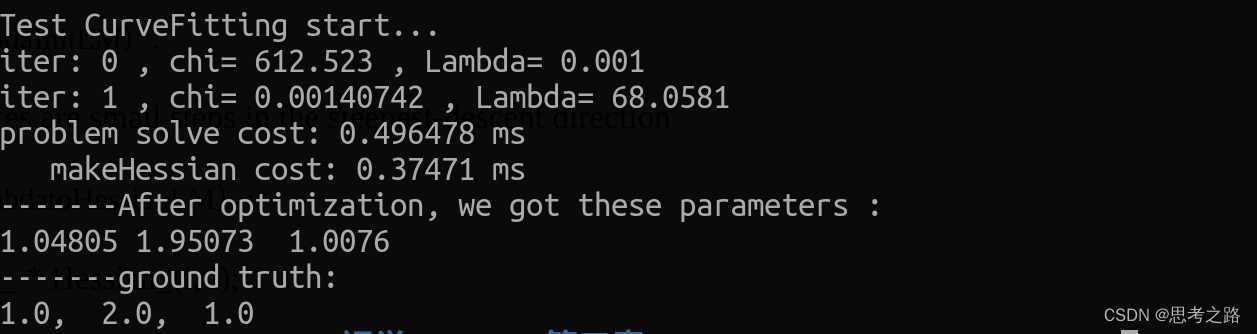
1.示例代码运行结果如下:
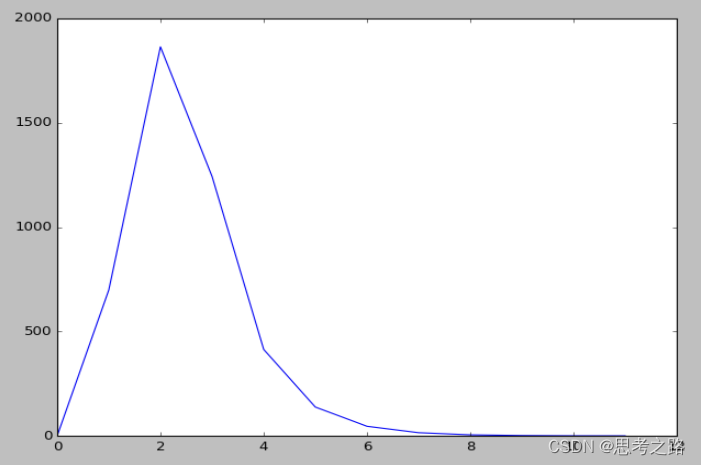
(1)LM中阻尼因子随迭代次数变化的曲线如下:
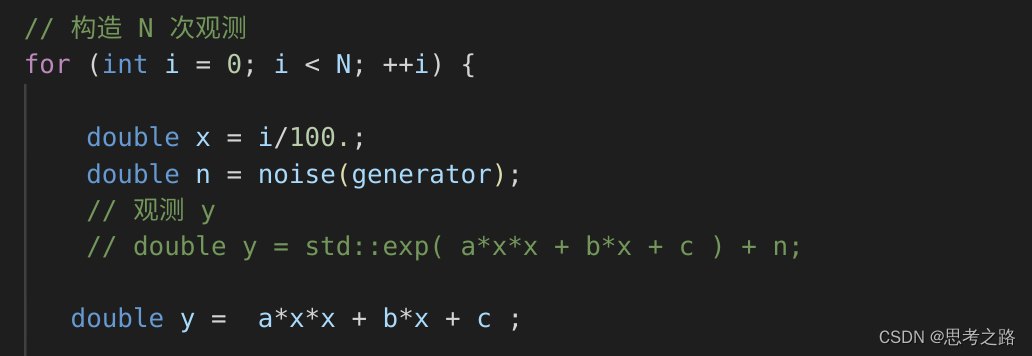
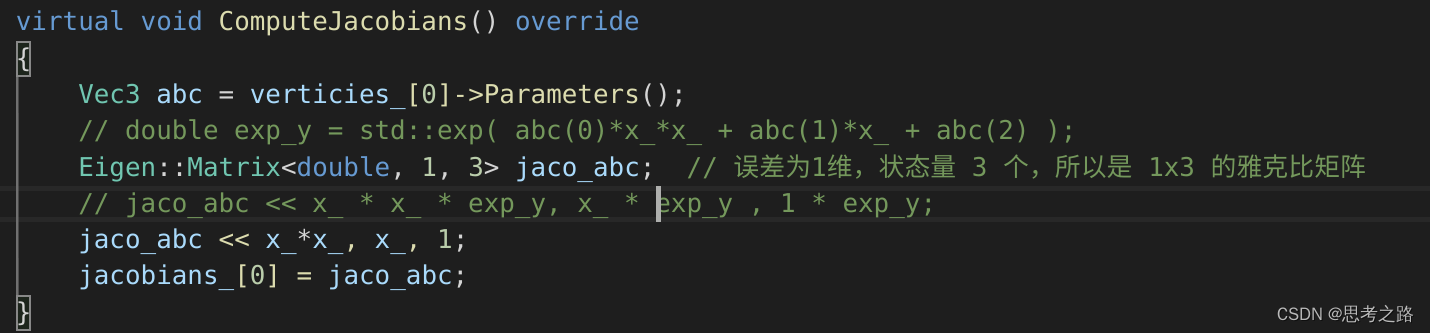
(2)修改需求后,曲线参数估计如下:
代码修改内容如下:

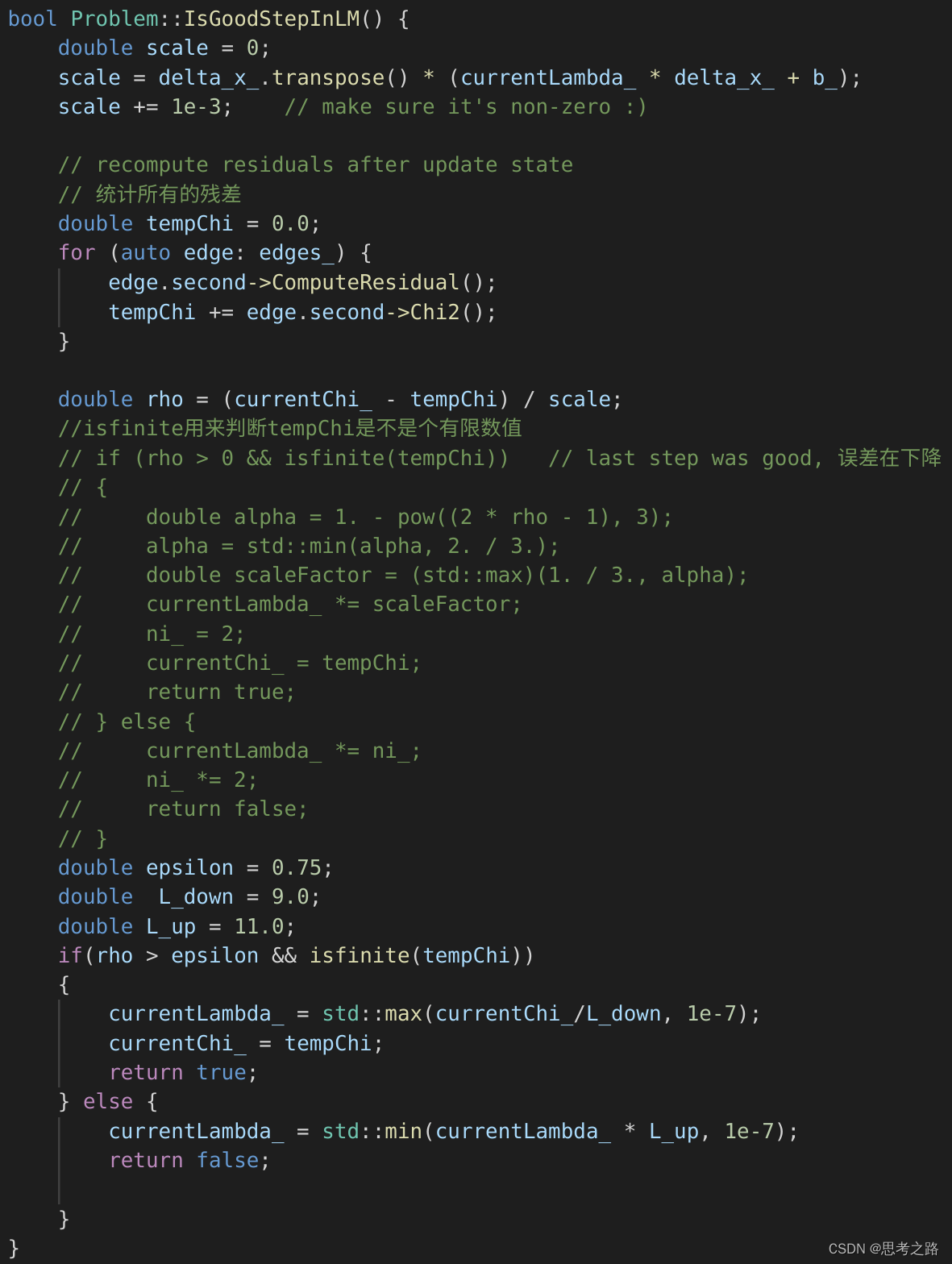
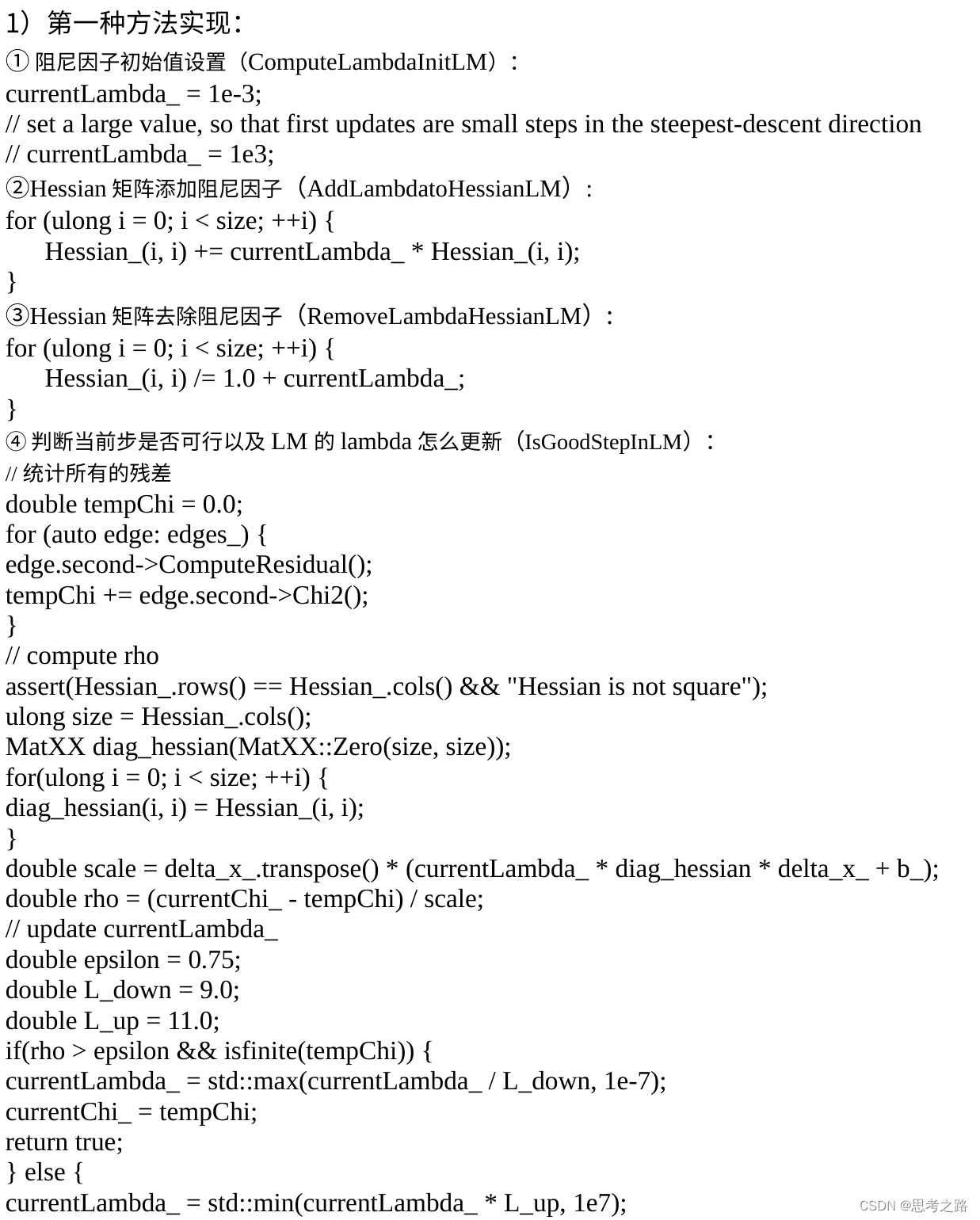
3.其他的阻尼更新策略
https://note.youdao.com/ynoteshare/index.html?id=15a9ff86fedeb41d92f182e5cb3bace7&type=notebook&_time=1666344980558
参考论文地址:https://www.doc88.com/p-7354572500487.html
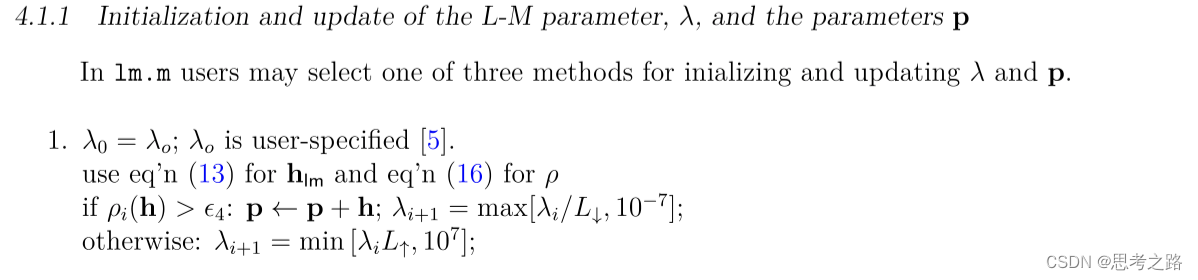
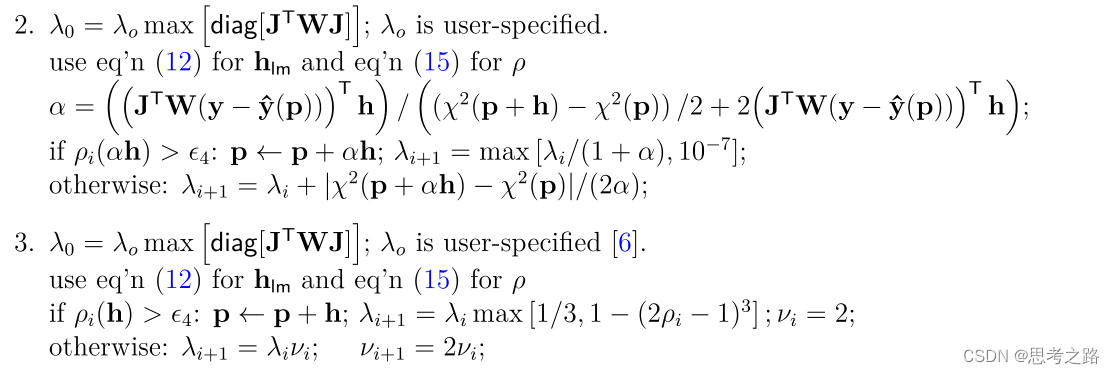
第一种更新策略实现代码如下:
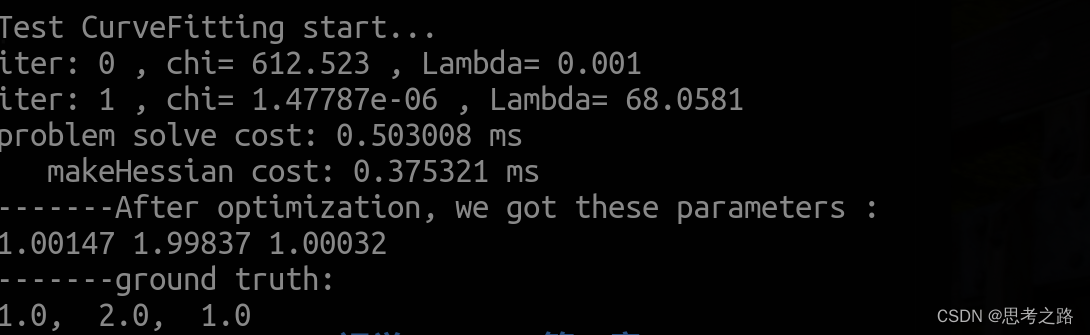
采用第一种更新策略的结果如下:
比较的结果是比方法三用时少(在第二个作业的基础上做修改)
2.














 486
486











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









