








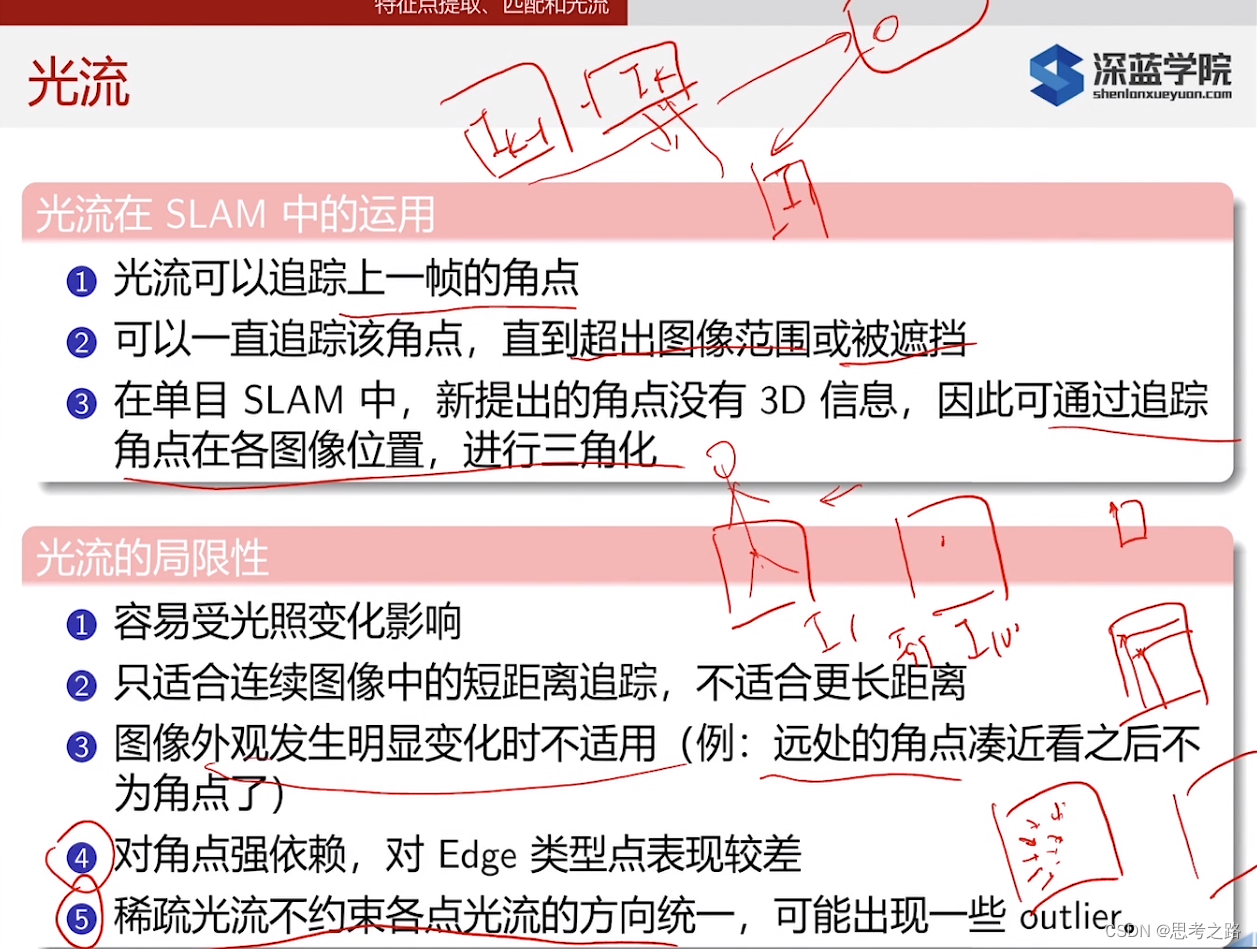
使用光流法对特征点或角点进行追踪时很容易丢失,而使用直接法进行追踪时曝光可能会受影响.
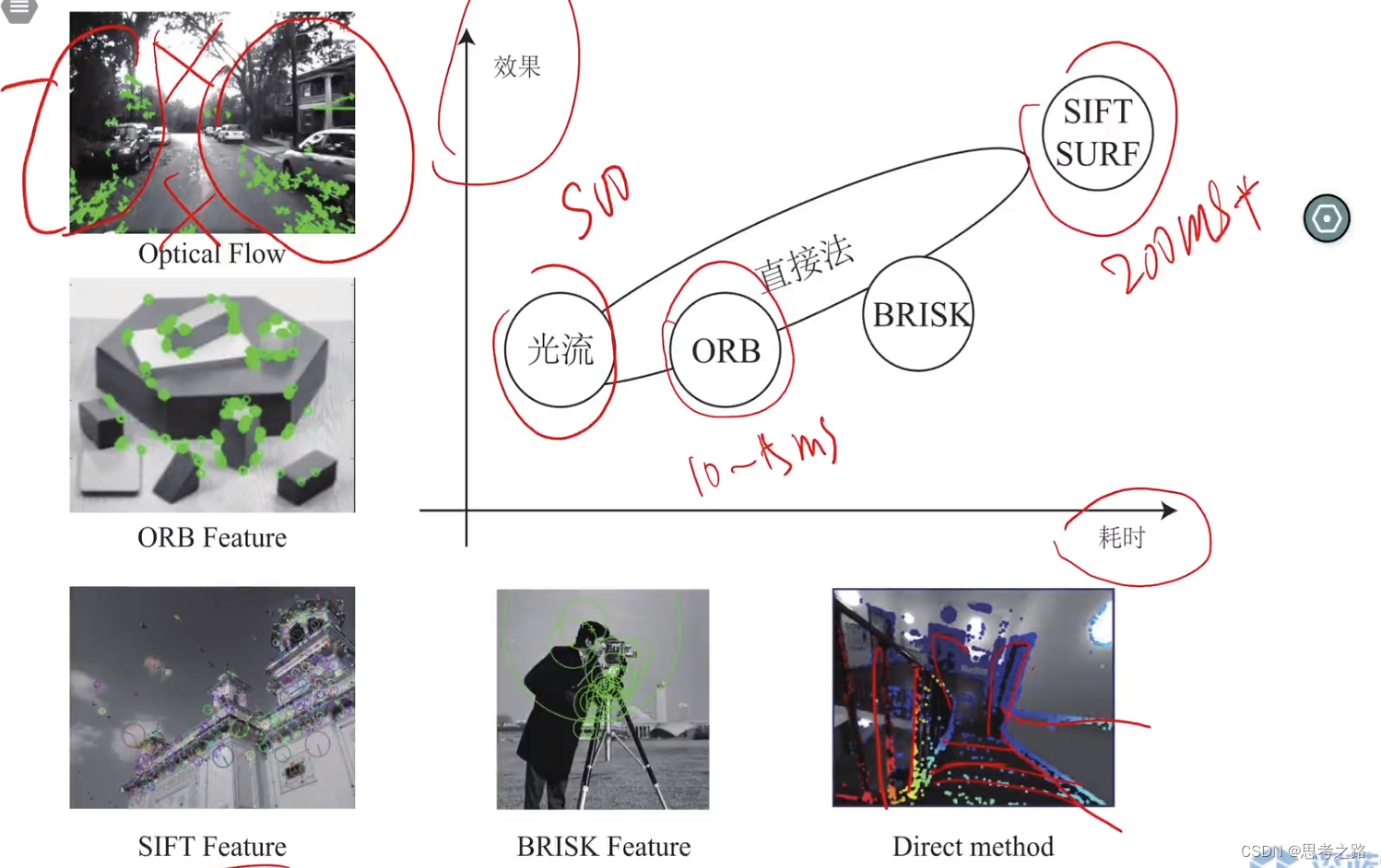
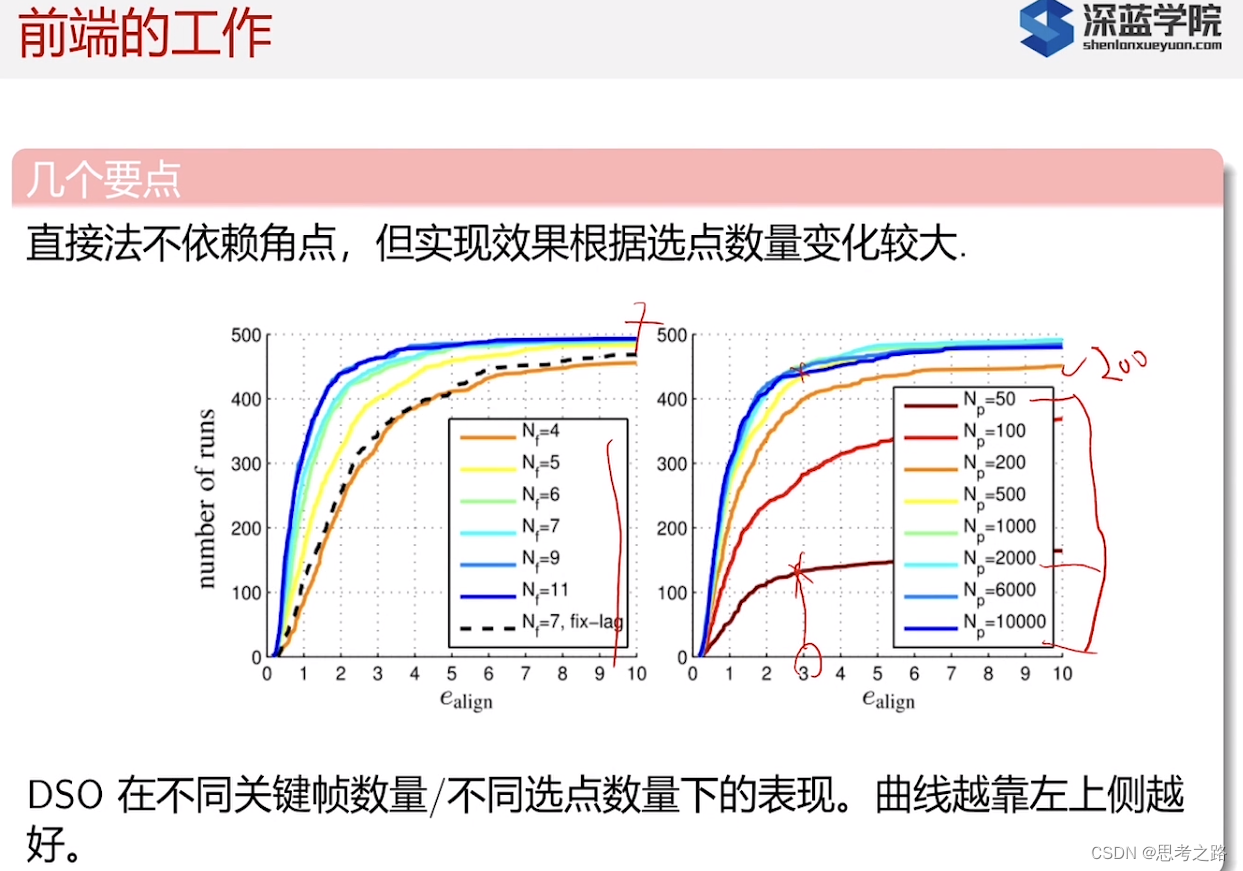
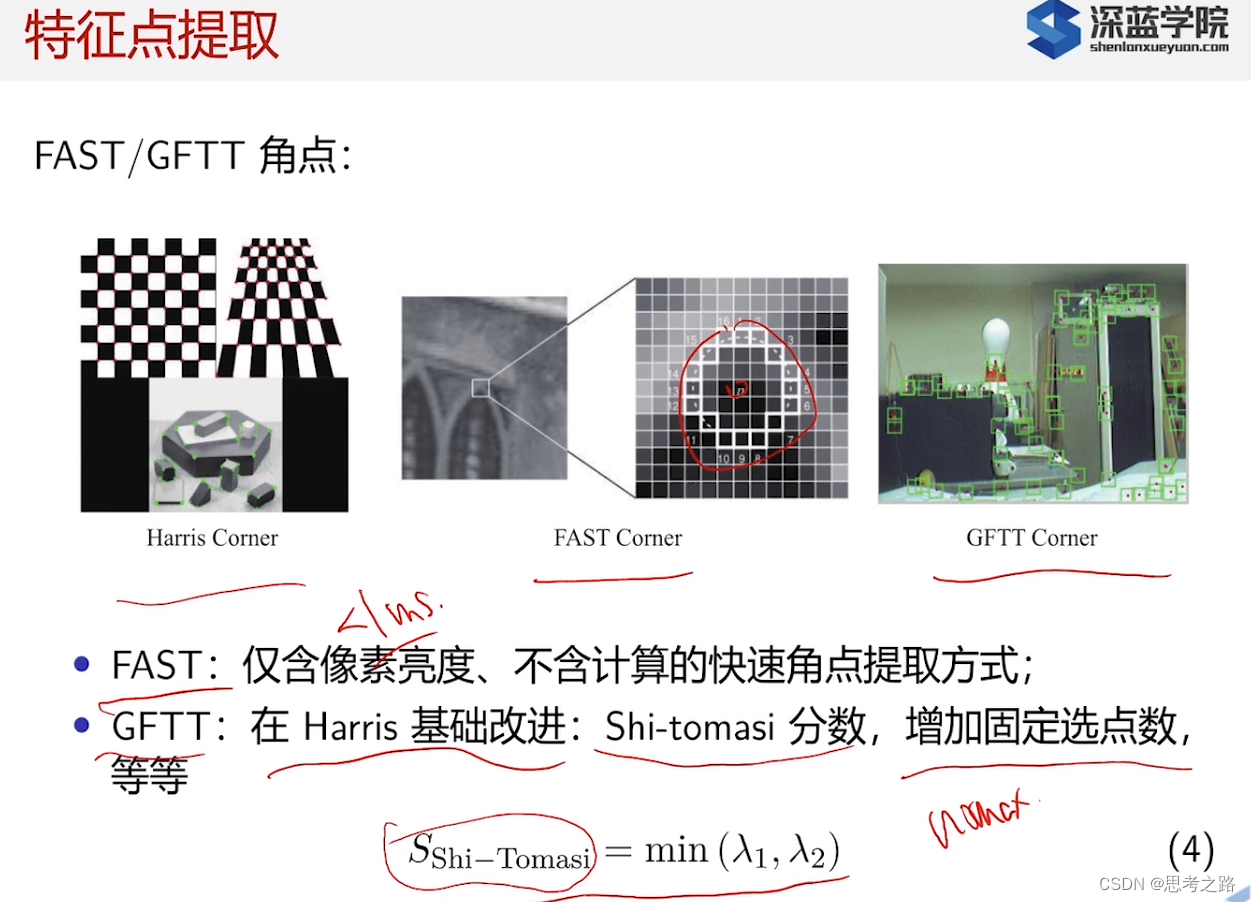
算法耗时越多,效果越好. ORB使用的是带有描述子的特征点法(直接法比特征点法效果好),直接法可以利用特征点选取的多少来决定耗时的长短进而决定追踪效果的好怀.
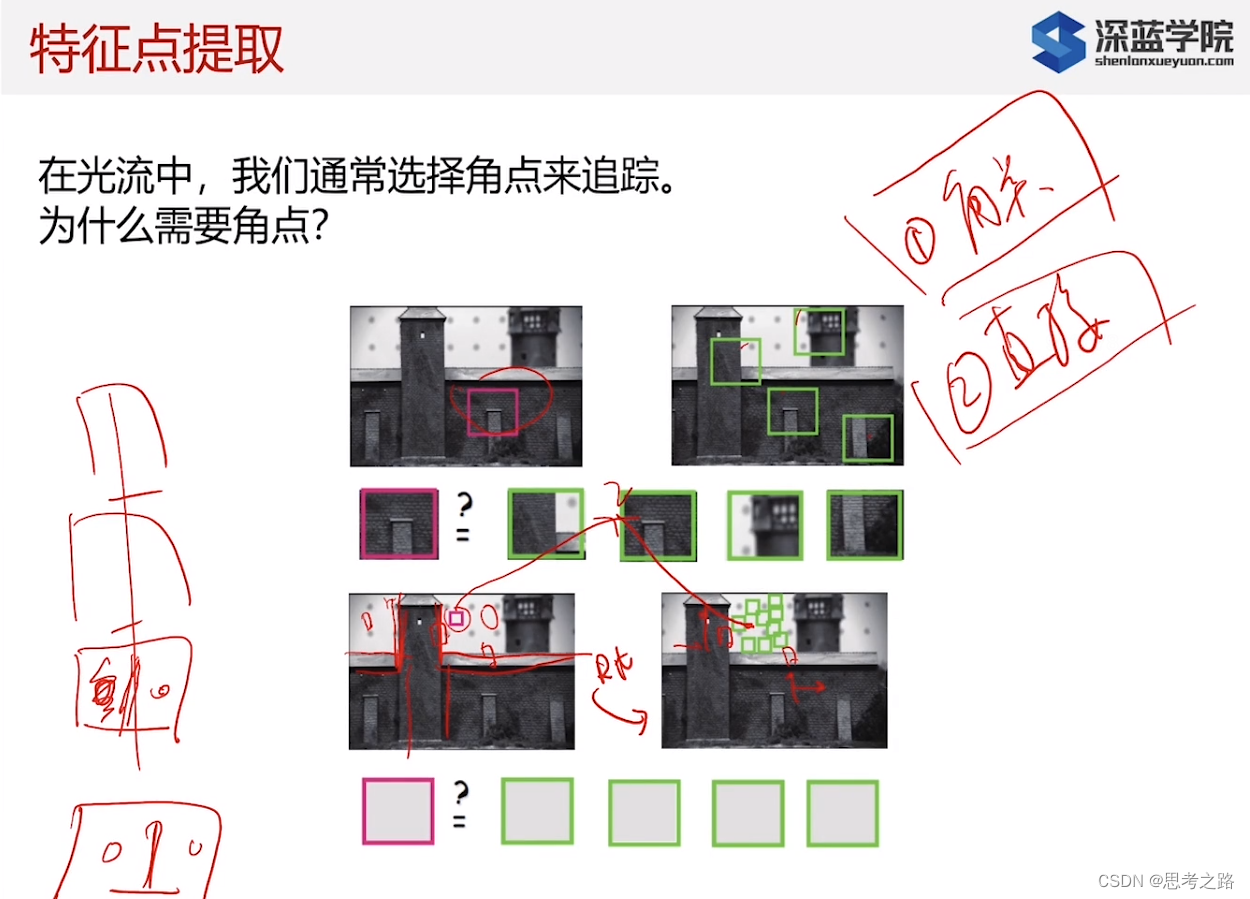


放射变换包含了选中的该方块的旋转和平移
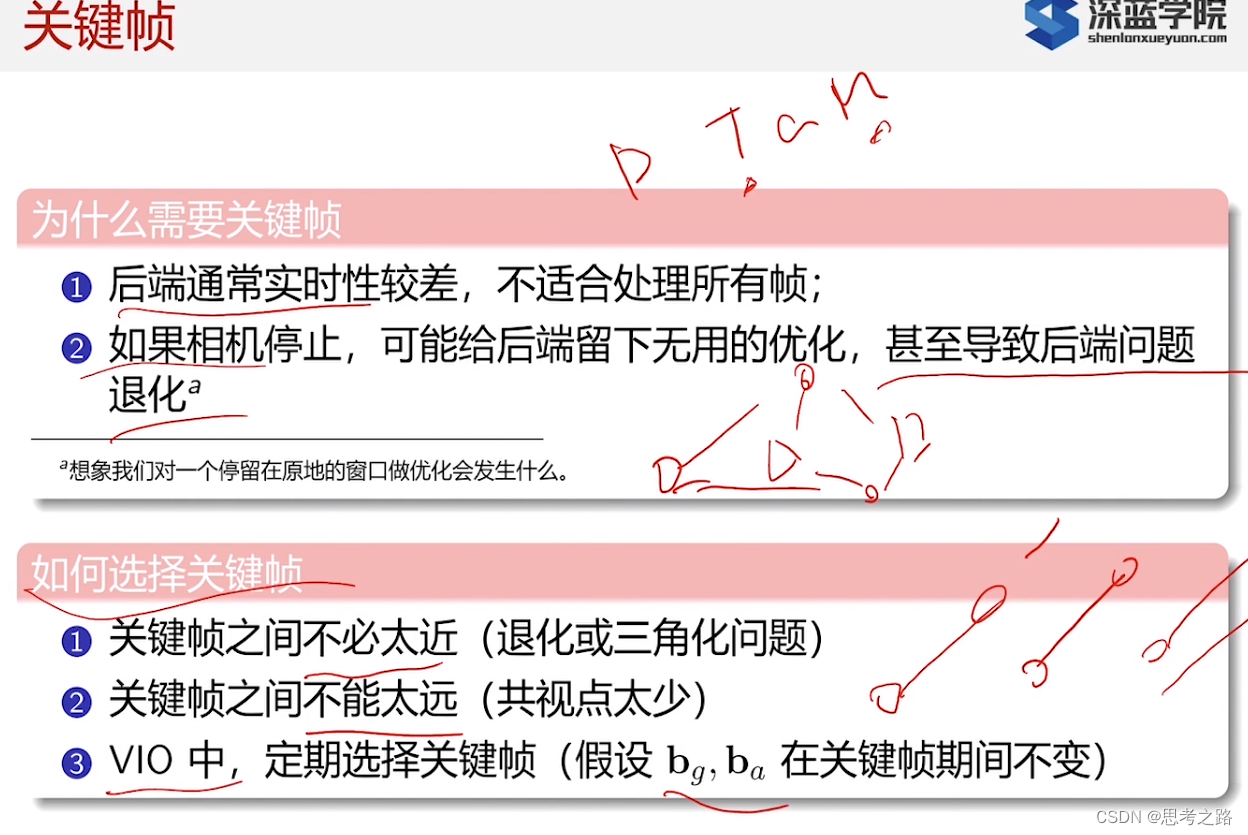
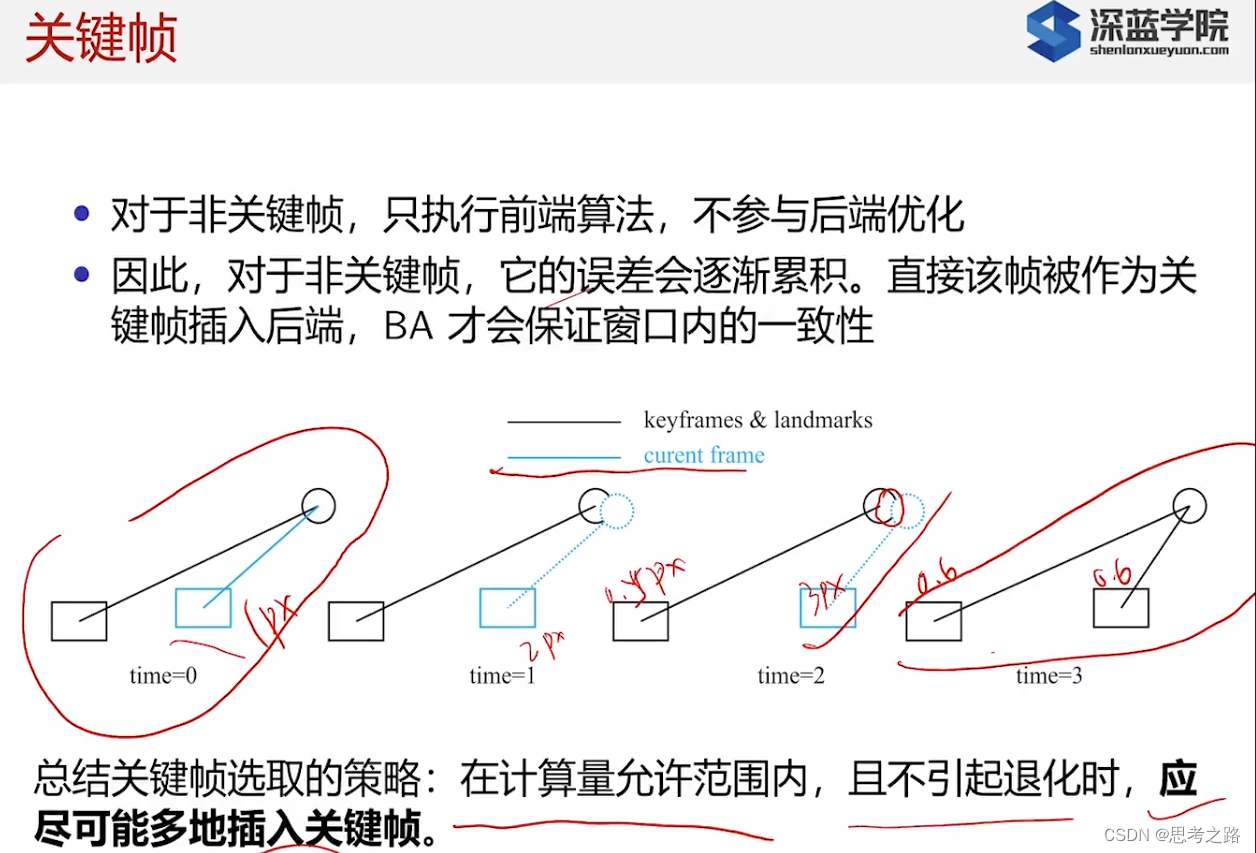
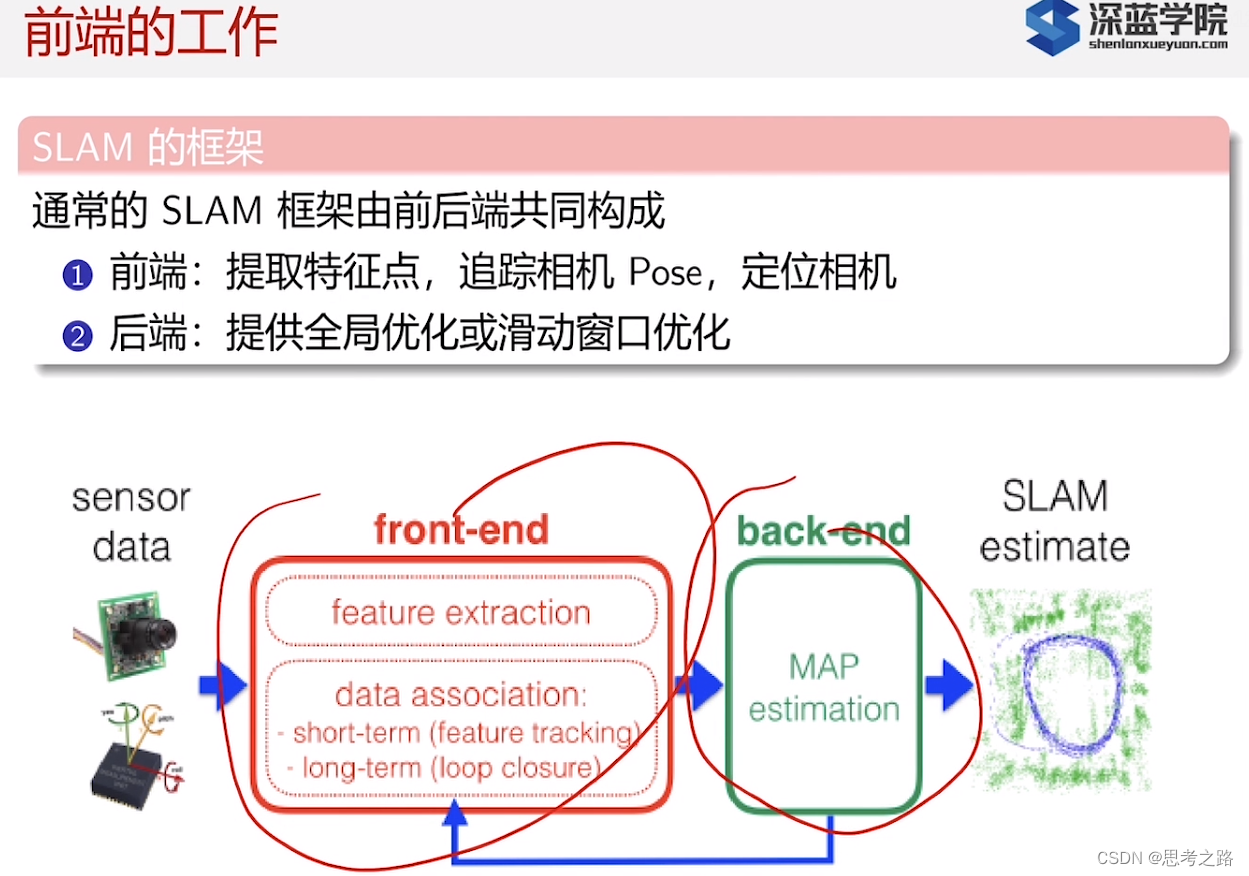
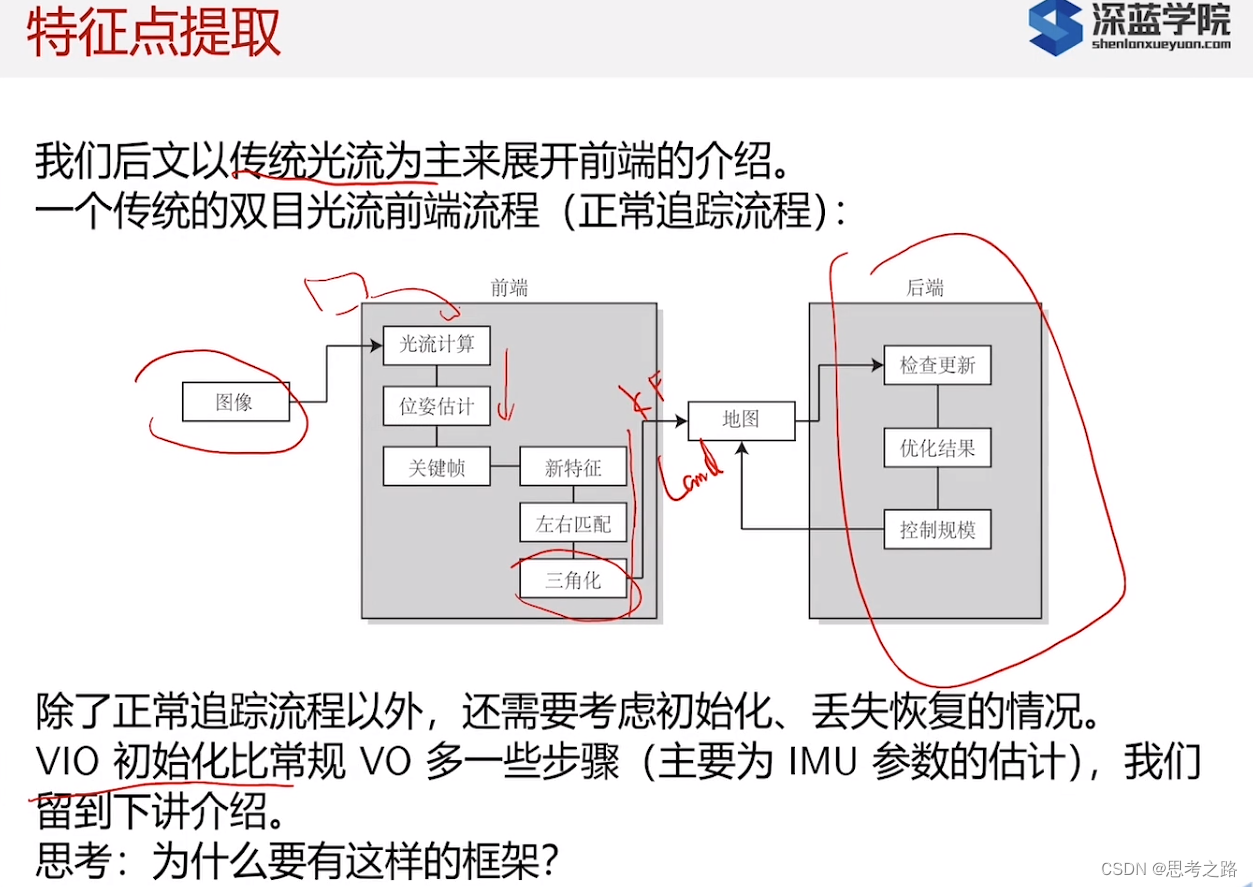
如果不插入关键帧,则会导致路标点深度信息一直不变,引起退化,插入关键帧后使用BA(光束法平差)将重投影误差进行平摊,使得后端对路标点的定位更加鲁棒.
















 441
441











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









