







 超级会员免费看
超级会员免费看
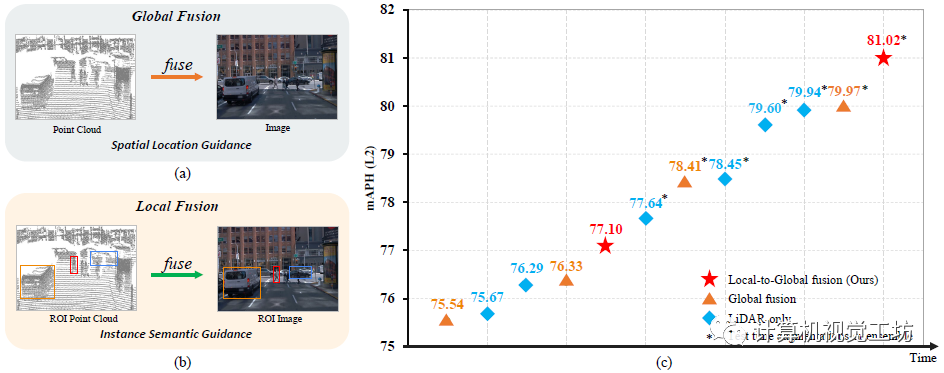
 本文深入探讨了近年来2D+3D数据融合在目标检测算法中的应用,包括PointPainting、TransFusion和LoGoNet等方法。PointPainting通过将图像语义分割结果叠加到点云上,实现序列融合。TransFusion利用Transformer进行LiDAR-Camera融合,以应对传感器配准问题。LoGoNet则提出局部到全局的跨模态融合策略,增强特征信息。这些工作在3D物体检测上取得了显著进展。
本文深入探讨了近年来2D+3D数据融合在目标检测算法中的应用,包括PointPainting、TransFusion和LoGoNet等方法。PointPainting通过将图像语义分割结果叠加到点云上,实现序列融合。TransFusion利用Transformer进行LiDAR-Camera融合,以应对传感器配准问题。LoGoNet则提出局部到全局的跨模态融合策略,增强特征信息。这些工作在3D物体检测上取得了显著进展。
作者:PCIPG-NaiveGeng | 来源:计算机视觉工坊
在公众号「计算机视觉工坊」后台,回复「原论文」即可获取论文pdf和代码。
添加微信:dddvisiona,备注:目标检测,拉你入群。文末附行业细分群。
PointPainting: Sequential Fusion for 3D Object Detection(CVPR2020)
1.简介
3D物体目标检测任务最好采用哪种传感器?Camera还是Lidar?不同团队给出了不同的答案。Camera和Lidar作为目标检测领域的两大巨头传感器,各有优缺点:图像的分辨率比较高,纹理信息比较丰富,但深度信息相对模糊;点云的空间信息、深度信息比较准确丰富,但数据往往比较稀疏、不够完整。由于两种传感器在一些方面存在互补关系,所以很多人相信我们可以利用多模态的方案来实现强强联合,开创1+1

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









