







 本文详细介绍了相机标定的原理,包括相机标定的作用,如校正图像畸变和映射3D到2D。重点讨论了径向畸变和切向畸变,并给出了校正公式。此外,还涵盖了相机标定的实现过程,包括实验数据集和结果展示,总结了评估结果的方法和注意事项。
本文详细介绍了相机标定的原理,包括相机标定的作用,如校正图像畸变和映射3D到2D。重点讨论了径向畸变和切向畸变,并给出了校正公式。此外,还涵盖了相机标定的实现过程,包括实验数据集和结果展示,总结了评估结果的方法和注意事项。
相机标定
1.相机标定原理
1.1 相机标定简介
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)
1.2 相机标定作用
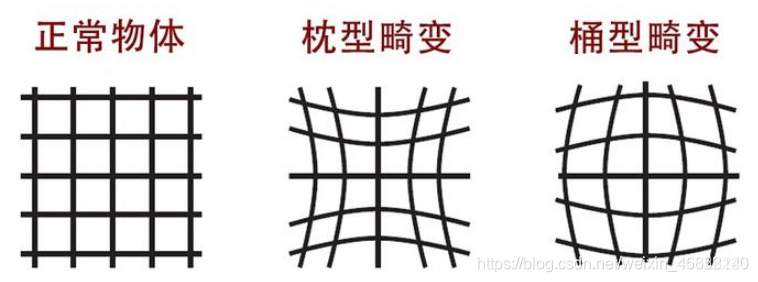
1、相机在出厂之前都需要进行相机标定,用软件的方法校正生成的图像,避免拍摄出的图像产生桶形和枕形畸变
2、根据相机成像的几何模型,将世界坐标系中的3D物体映射到2D成像平面上
3、求解多个相机对之间的映射关系。
2.畸变
2.1畸变
相机标定是标定图像产生的畸变,畸变的类型主要有一下三种:
①径向畸变是由透镜本身的制造误差造成的
②切向畸变是由于透镜安装与“图像”平面不平行产生的
③焦距和主点(焦距影响图像的模糊程度,主点影响位置的偏移)
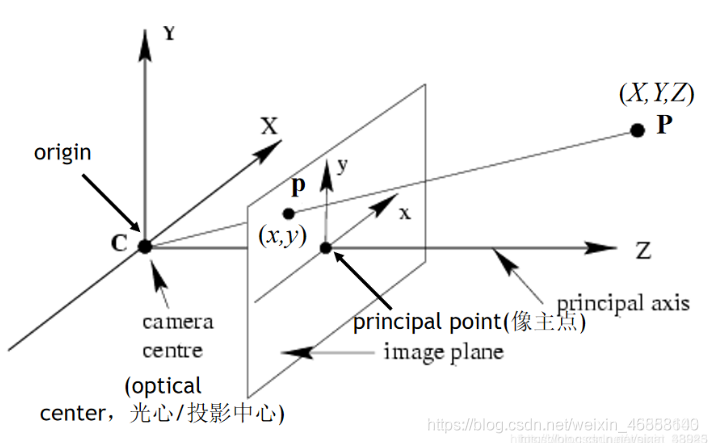
下图为小孔成像模型
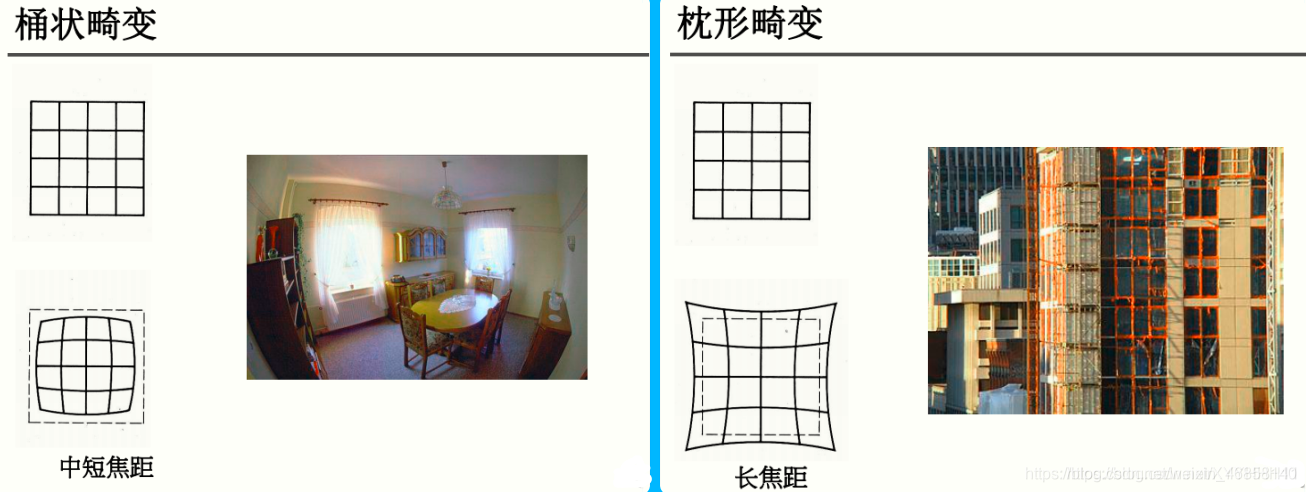
常见的畸变如下
2.2径向畸变
对某些透镜,光线在远离透镜中心的地方比靠近中心的地方更加弯曲,产生“筒形”或“鱼眼”现象,称为径向畸变。
一般来讲,成像仪中心的径向畸变为0,越向边缘移动,畸变越严重。不过径向畸变可以通过下面的泰勒级数展开式来校正:
xcorrected = x(1+k1r2+k2r4+k3r6)
ycorrected = y(1+k1r2+k2r4+k3r6)
这里(x, y)是畸变点在成像仪上的原始位置,r为该点距离成像仪中心的距离,(xcorrected ,ycorrected )是校正后的新位置。
对于一般的摄像机校正,通常使用泰勒级数中的前两项k1和k2就够了;对畸变很大的摄像机,比如鱼眼透镜,可以使用第三径向畸变项k3
2.3切向畸变
当成像仪被粘贴在摄像机的时候,会存在一定的误差,使得图像平面和透镜不完全平行,从而产生切向畸变。也就是说,如果一个矩形被投影到成像仪上时,可能会变成一个梯形。切向畸变可以通过如下公式来校正:
xcorrected = x + [ 2p1y + p2 (r2 + 2x2) ]
ycorrected = y + [ 2p2x + p1 (r2 + 2y2) ]
这里(x, y)是畸变点在成像仪上的原始位置,r为该点距离成像仪中心的距离,(xcorrected ,ycorrected )是校正后的新位置。
3.实现过程与结果
3.1代码
import cv2
import numpy as np
import glob
# 找棋盘格角点
# 阈值
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
#棋盘格模板规格
w = 6 #内角点个数,内角点是和其他格子连着的点
h = 4
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w*h,3), np 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 837
837











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









