







 本文介绍了计算机视觉中的相机标定过程,包括世界坐标系与相机坐标系、相机坐标系与图像物理坐标系、图像物理坐标系与图像像素坐标系的转换。详细讲解了内参数矩阵的构成,并对比了棋盘格和圆形标定板的特点。文章还提到了张正友标定法的优势,以及在实际操作中使用Matlab进行相机参数导出。
本文介绍了计算机视觉中的相机标定过程,包括世界坐标系与相机坐标系、相机坐标系与图像物理坐标系、图像物理坐标系与图像像素坐标系的转换。详细讲解了内参数矩阵的构成,并对比了棋盘格和圆形标定板的特点。文章还提到了张正友标定法的优势,以及在实际操作中使用Matlab进行相机参数导出。
摄像机几何
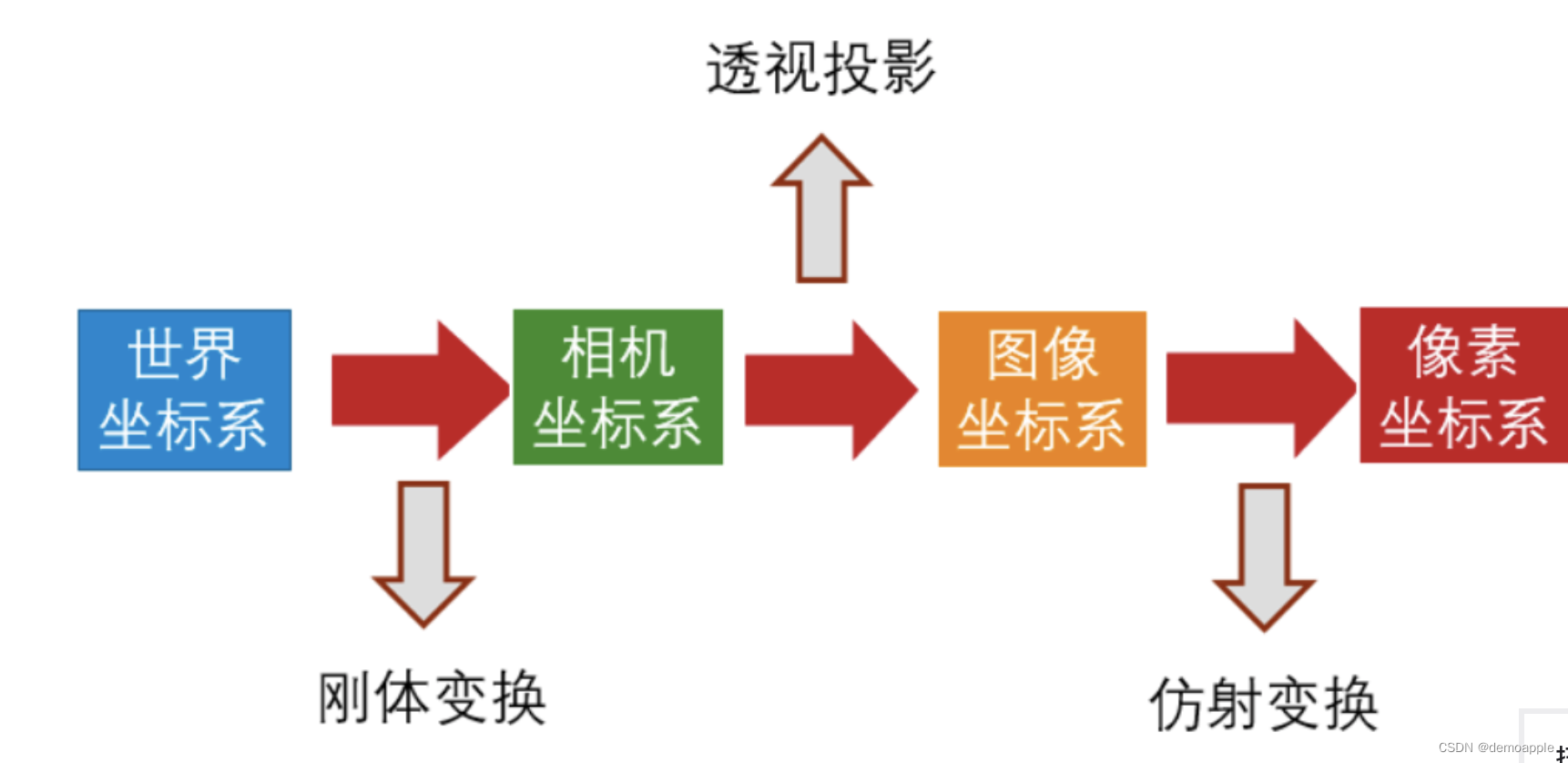 ① 世界坐标系与相机坐标系
① 世界坐标系与相机坐标系
② 相机坐标系与图像物理坐标系
这是一个将三维的坐标系转化为二维的坐标系,这两个坐标系之间的转换要通过几何投影模型关系获得
③ 图像物理坐标系与图像像素坐标系
首先以一个形象的例子来说明两个坐标系间的区别。物理坐标系是一个连续的概念,它是以毫米为单位,就好比某一观众在电影院里的具体坐标值(3.4,5.9);而像素坐标系是一个离散的概念,它是以像素作为单位,只能是整数值坐标,就好比某一观众在电影院里的位置是(第三排,第六列)。另外还需要注意的是,这两个坐标系的原点位置也不相同,物理坐标系将原点定为摄像机光轴与图像物理坐标系的交点位置,通常称其为主点;而像素坐标系则以像素图像的左上角为原点。
整体的变换为:
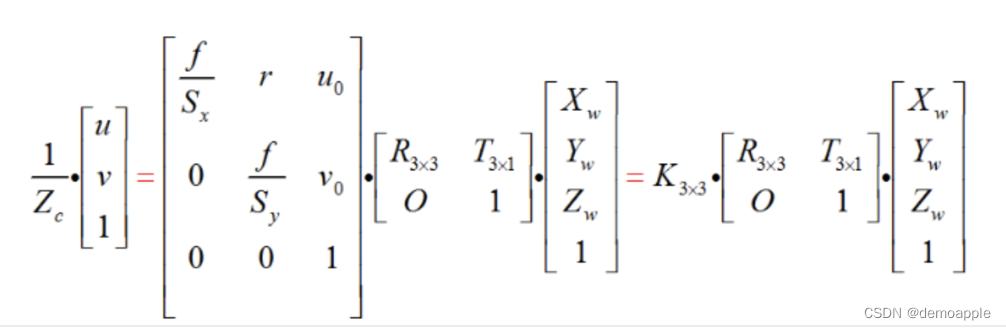
R为旋转变换矩阵,T为平移变换矩阵,K为内参数矩阵
内参数矩阵有五个自由度
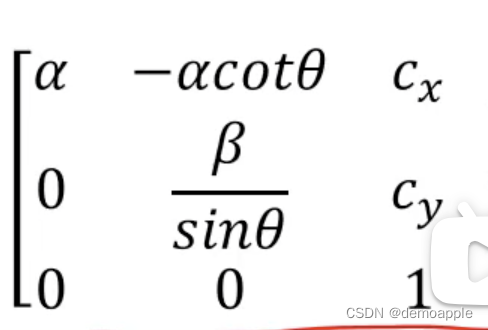
a=焦距*像素相关的x尺度因子,b=焦距*像素相关的y尺度因子,o=像素坐
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









