








雷达互动系统是借助雷达眼的扫描,对触控进行位置反馈,就目前应用较广泛的互动雷达依辅屏幕的一个面或者投影的一个墙面。
激光雷达最基本的工作原理与无线电雷达没有区别!激光雷达的发射器发射出一束激光,激光光束遇到物体后,经过漫反射,返回至激光接收器,雷达模块根据发送和接收信号的时间间隔乘以光速,再除以2,即可计算出发射器与物体的距离。
激光雷达是一种雷达系统,是一种主动传感器,所形成的数据是点云形式。其工作光谱段在红外到紫外之间,主要发射机、接收机、测量控制和电源组成。
目前激光雷达的功能主要是识别障碍物在XY的一个面具体方位,然后标注方位,通过障碍物触发!
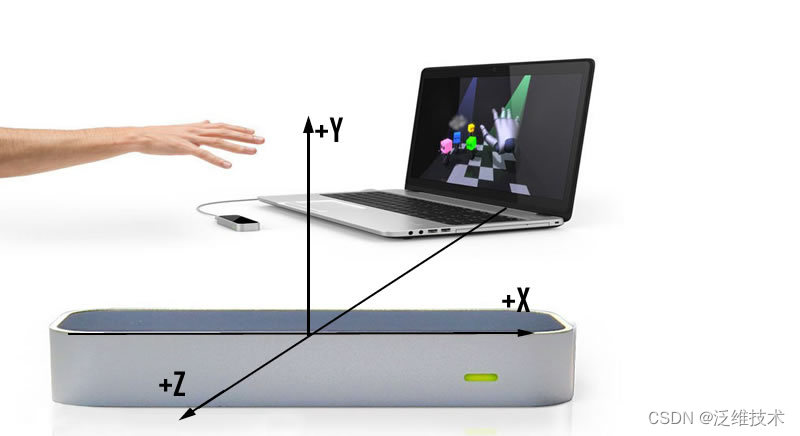
Leap Motion传感器根据内置的两个摄像头从不同角度捕捉的画面,重建出手掌在真实世界三维空间的运动信息。检测的范围大体在传感器上方 25 毫米到 600 毫米之间,检测的空间大体是一个倒四棱锥体。Leap Motion 传感器会建立一个直角座标系,座标的原点是传感器的中心,座标的 X 轴平行于传感器,指向屏幕右方。Y 轴指向上方。Z 轴指向背离屏幕的方向。单位为真实世界的毫米。如图:
Leap Motion 传感器会给所有这些分配一个唯一标识(ID),在手掌、手指、工具保持在视野范围内时,是不会改变的。根据这些 ID,可以通过 Frame::hand( ) , Frame::finger( ) 等函数来查询每个运动对象的信息。
Leap Motion传感器定位与输入是VR技术的关键,在业内比较有代表性的就是手势识别技术,当然这并非Leap Motion独有的技术,hololens上同样搭载该技术.
Kinect2.0 有三个摄像头组成

彩色摄像头:用来拍摄视角范围内的彩色视频图像。红外投影机:主动投射近红外线光谱,照射到粗糙物体、或是穿透毛玻璃后,会形成随机的反射斑点,称之为散斑。进而能够红外摄像头读取。深度(红外)摄像头:分析红外光谱,创建可视范围内的人体、物体的深度图像。
















 4907
4907











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











