







一、设备简介
硬件:PC10G-CPU、TOYOPUC-DCM、MR-J4-70B、MCSSC运动模块;
软件:PCwin、MotionToll、MR Configurator2;
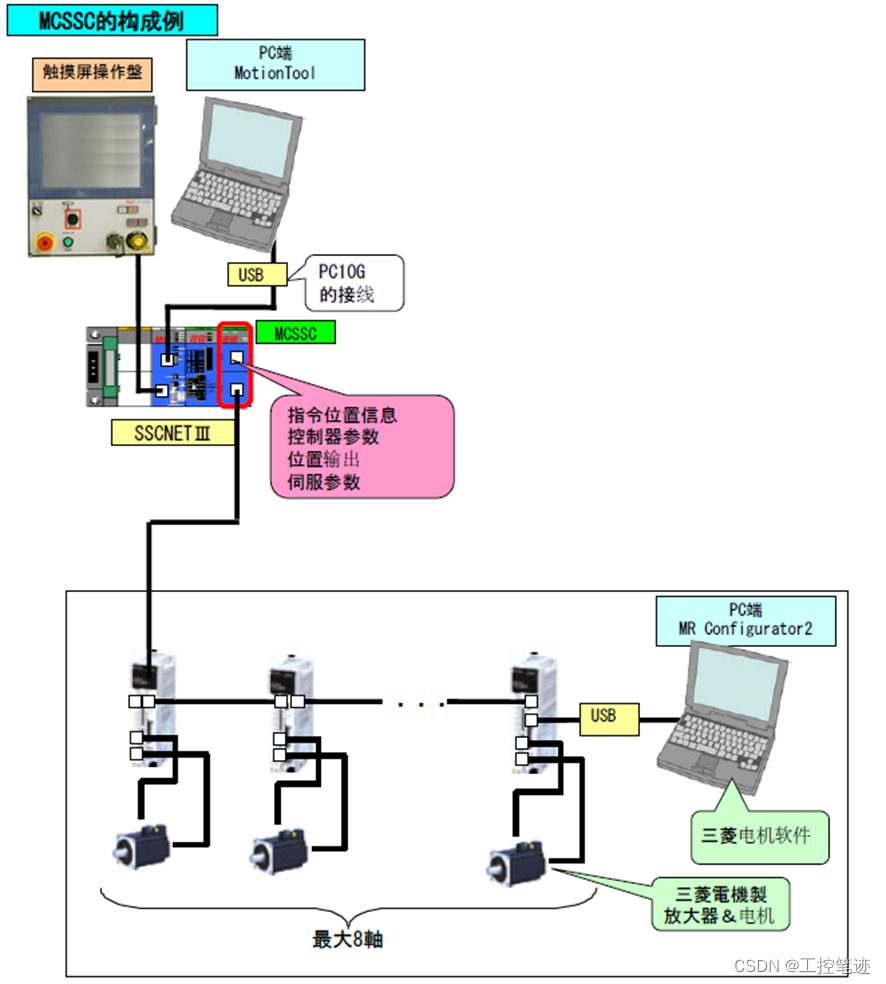
二、硬件系统构成
1.总括图
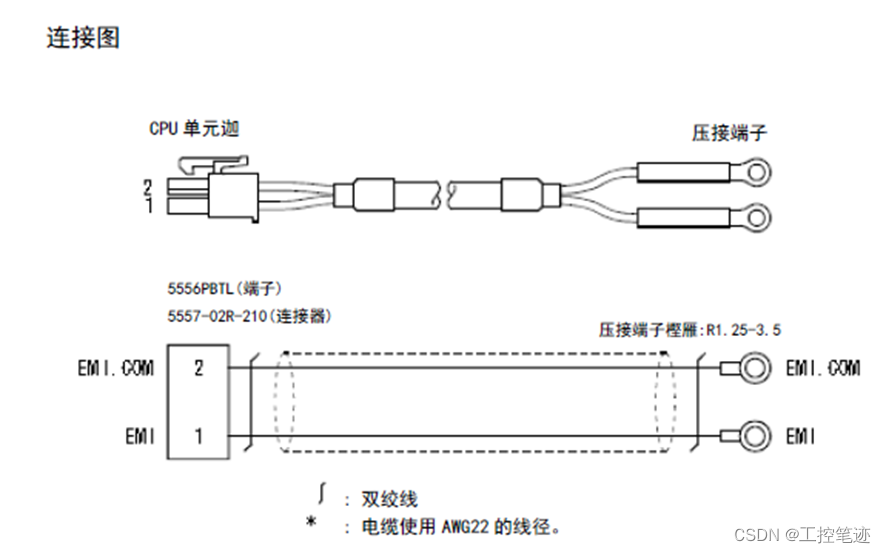
2.接线注意事项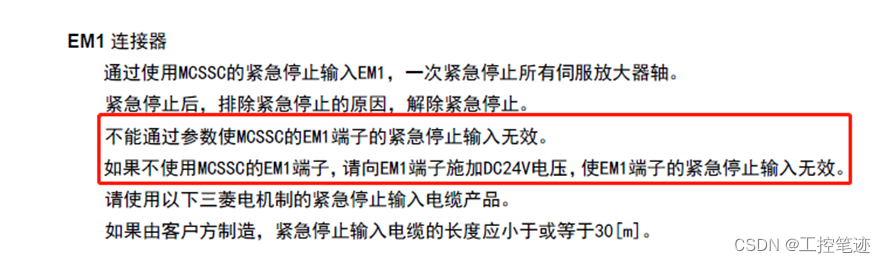
三、PC10G配置
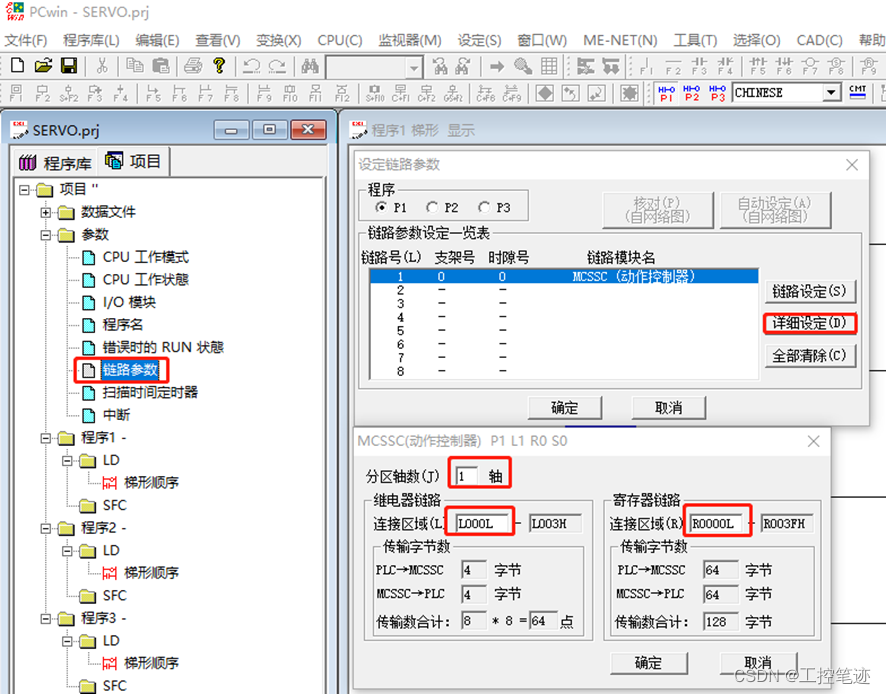
1.打开PCwin软件添加MCSSC运动模块;
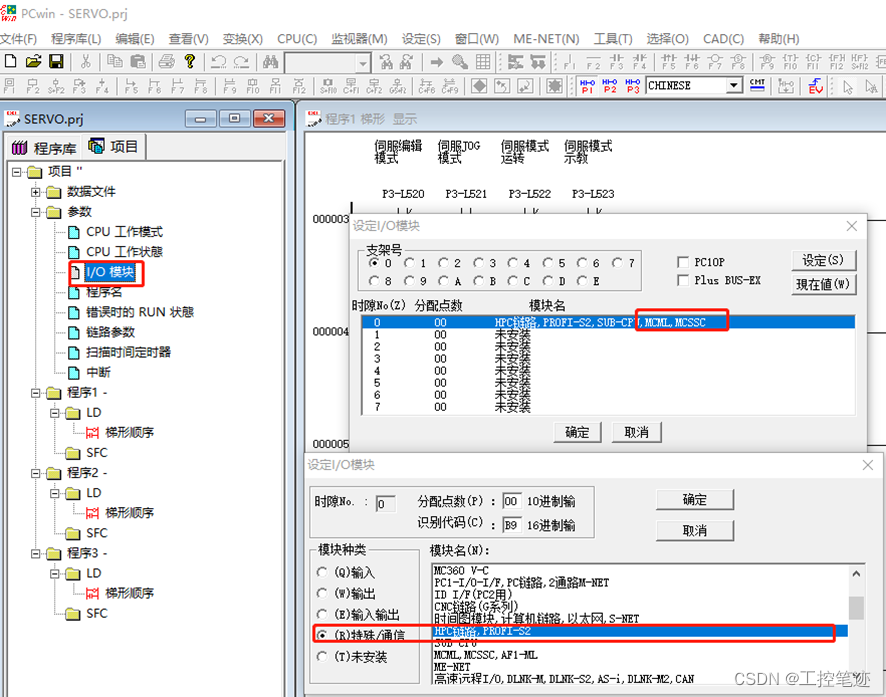
2.点击详细设定配置连接轴数量、连接地址。MCSSC运动模块最大支持8轴,本文以1轴为例介绍。
四、更改MR-J4兼容MR-J3设置
在MR-J4-□B放大器(以下简称J4B放大器)中,通讯方式由SSCNET-Ⅲ改为SSCNET-Ⅲ/H。因此需要将J4B放大器更改为SSCNET-Ⅲ模式。本文介绍两种更改MR-J4兼容模式方法。
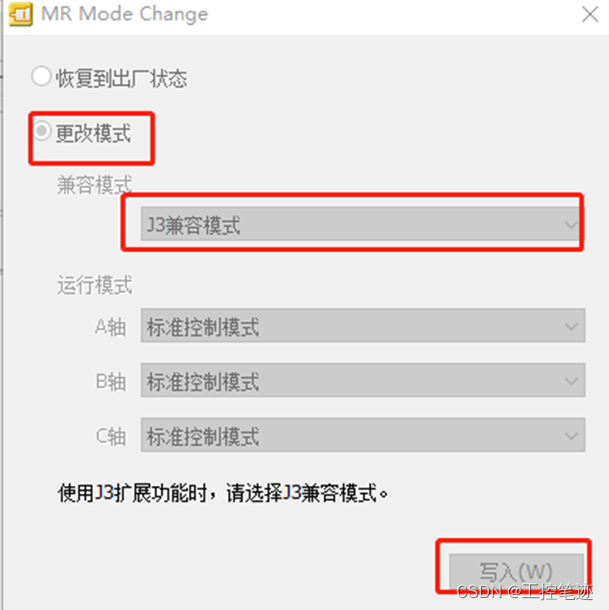
方法一:1.找到MELSOFT文件打开MR Mode Change软件

2.连接伺服放大器后下文图片有灰色变为黑色后可更改设置,更改后写入到伺服放大器内。
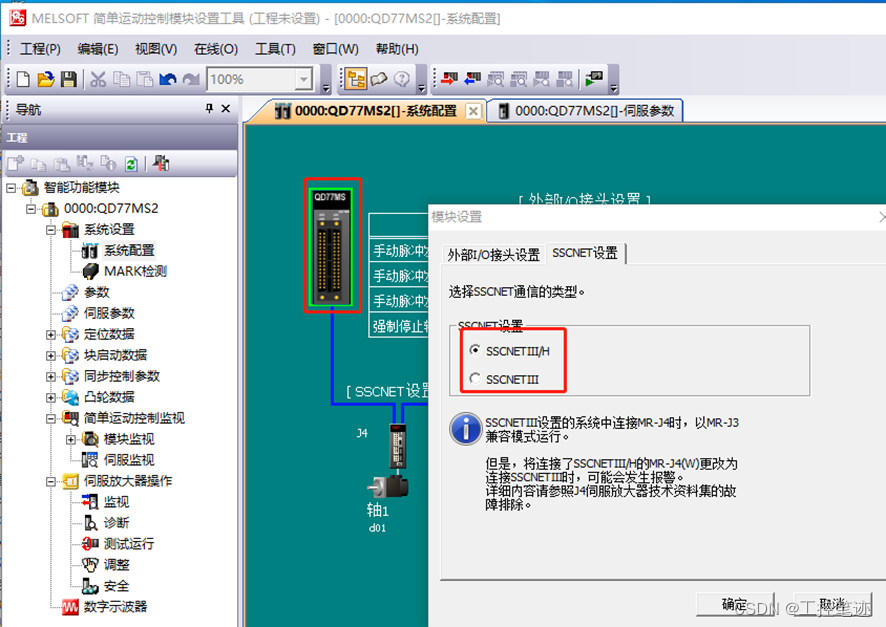
方法二:1.打开MELSOFT简单运动控制模块设置工具-双击运动控制模块-选择SSCNET设置-选择SSCNETIII。此方法仅限于使用三菱运动控制模块时使用。
五、MotionToll软件设置
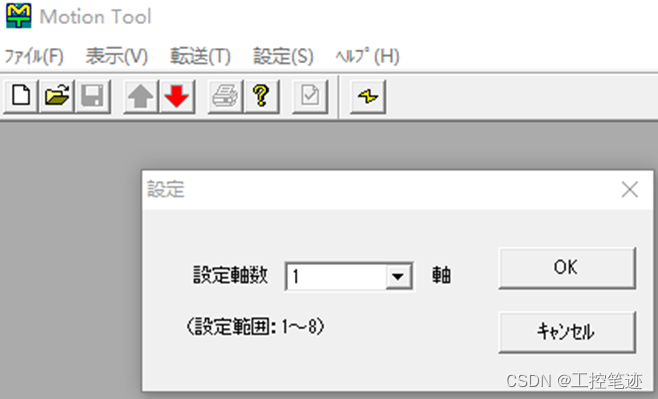
1.打开MotionToll软件-选择MCSSC
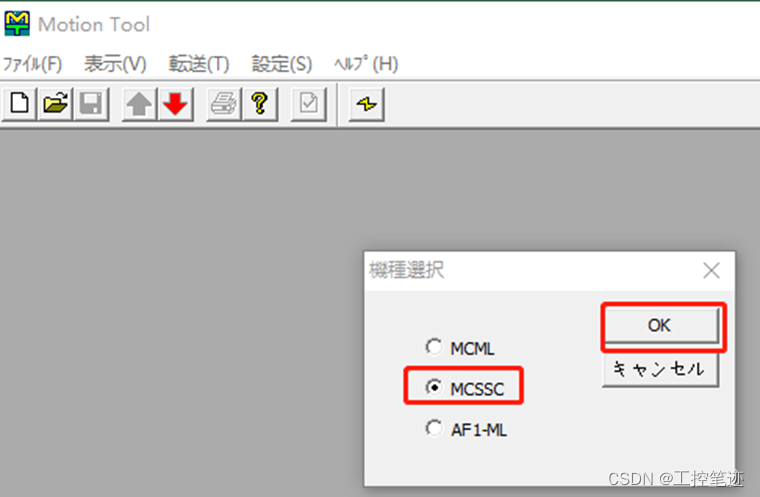
2.选择要连接的轴数量
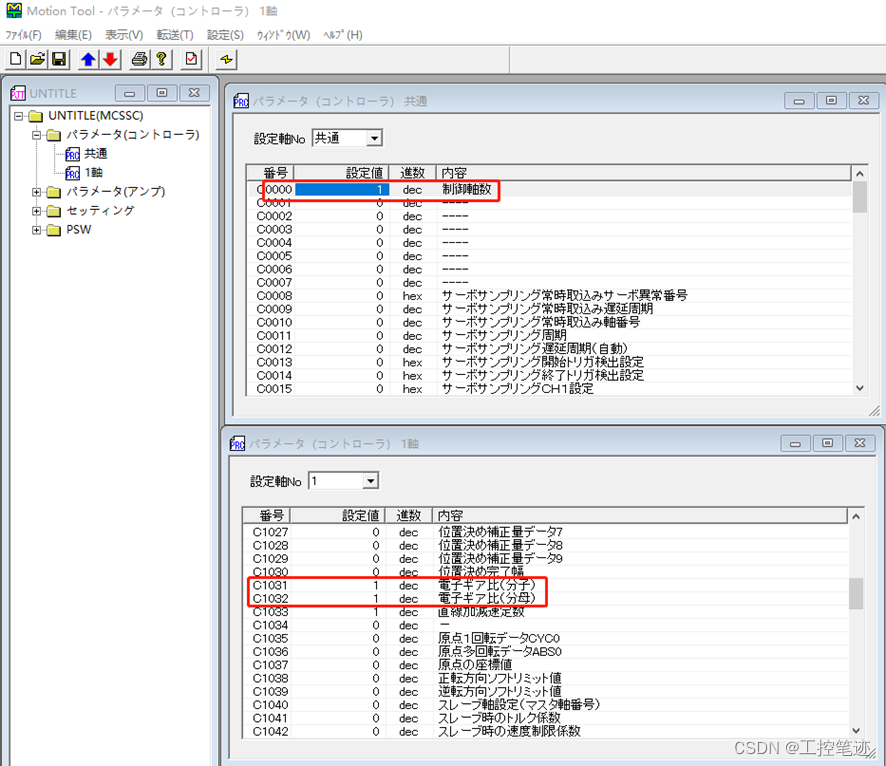
3.共通部、轴设定按照各自需求设置。一般情况下只需设置轴数电子齿轮比、编码器分辨率即可(电子齿轮比怎样计算可查看小编之前更新的文章,此处不作赘述。)
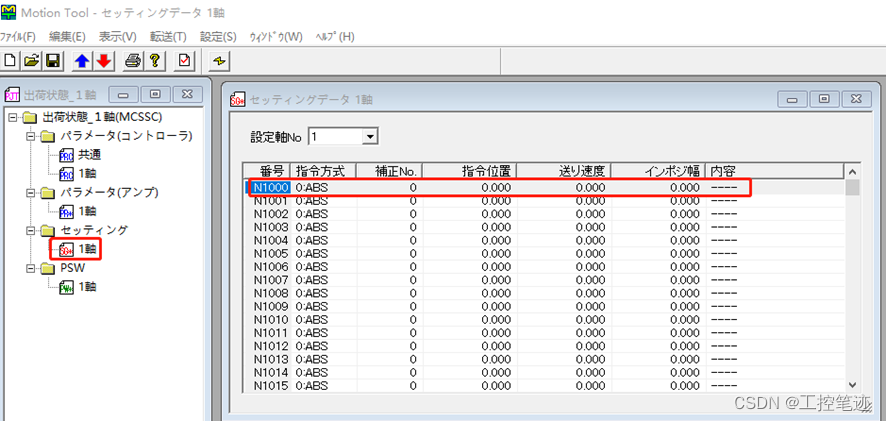
4.轴点位设置-根据各自需求设置
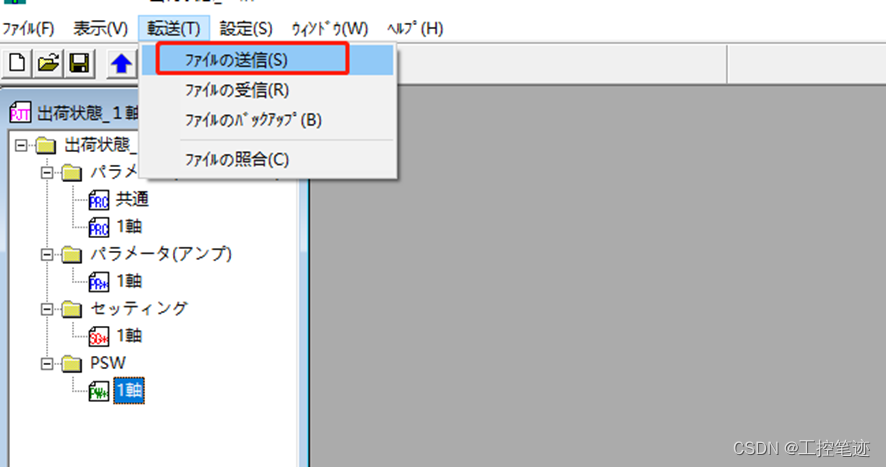
5.参数设置完毕传送到MCSSC内
六、实验结果
扫一到下方二维码,关注公众号可观看实验结果。
七、总结
- MotionToll内一定要合理设置分辨率、电子齿轮比,否则电机无法转动。
- PC10G与MR-J4的SSCNETⅢ通讯必须要设置成兼容J3模式。
- TOYOPUC-DCM在伺服方面做得还是不错的,手动校准、参数设置均可在屏内设置。
转载声明
凡未声明为转载的内容,均属于“工控笔迹”独家版权所有,未经许可不得转载或镜像;授权转载必须注明来源为"呆萌君"。未经授权擅自复制或镜像,违者必究。



















 2848
2848

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











