







一、内容简介
本文主要介绍欧姆龙CP1E做上位与SMC的LECP6电缸 之间串行通讯RS485 Modbus RTU协议程序控制说明。
二、设备简介
硬件:CP1E、CP1W-CIF11、LECP6;
软件:CX-Programmer、ACTController Menu(SMC电缸调试软件);
三、硬件系统构成
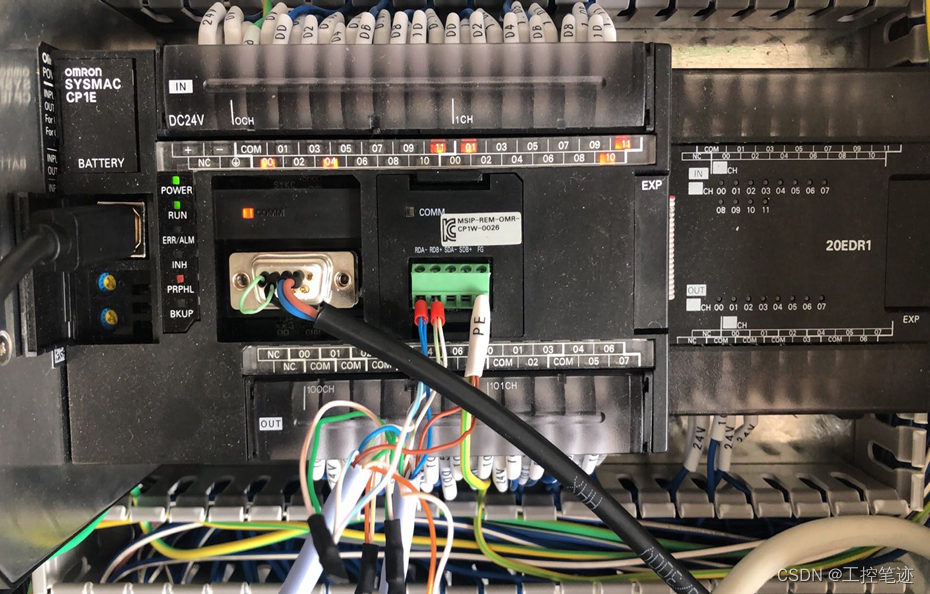

四、 欧姆龙侧配置
1.打开CX-Programmer软件新建项目,配置如下:

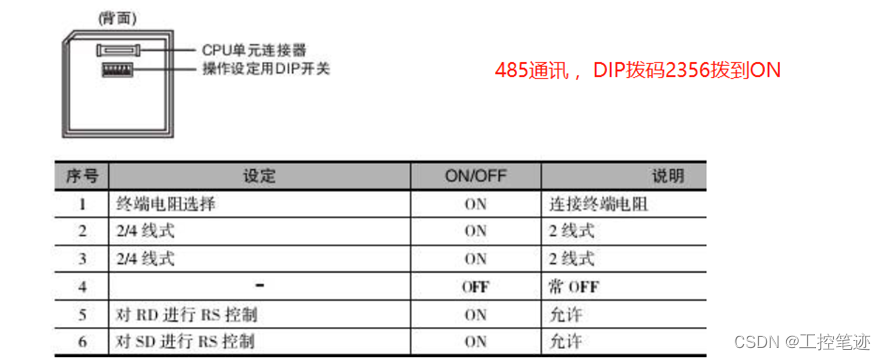
2.将选件插件背面的DIP拨码改为“2356-ON”
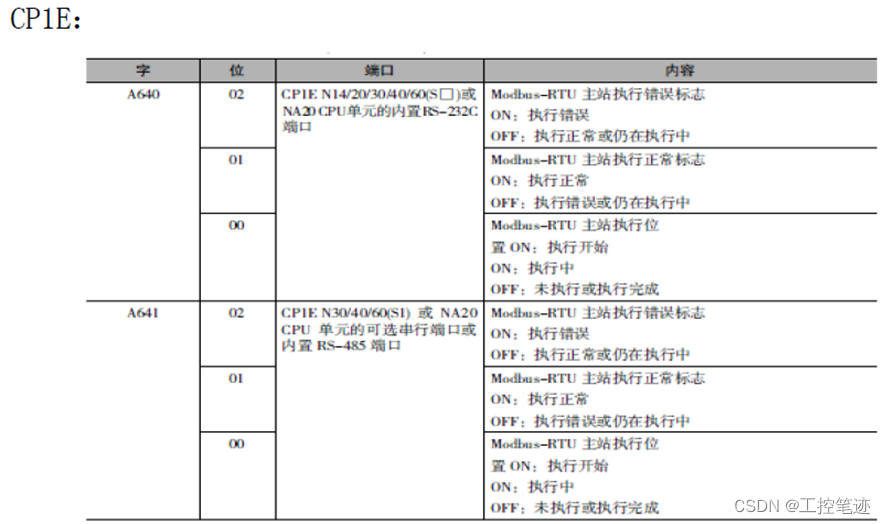
3.欧姆龙PLC侧Modbus通讯相关控制为如下图所示:
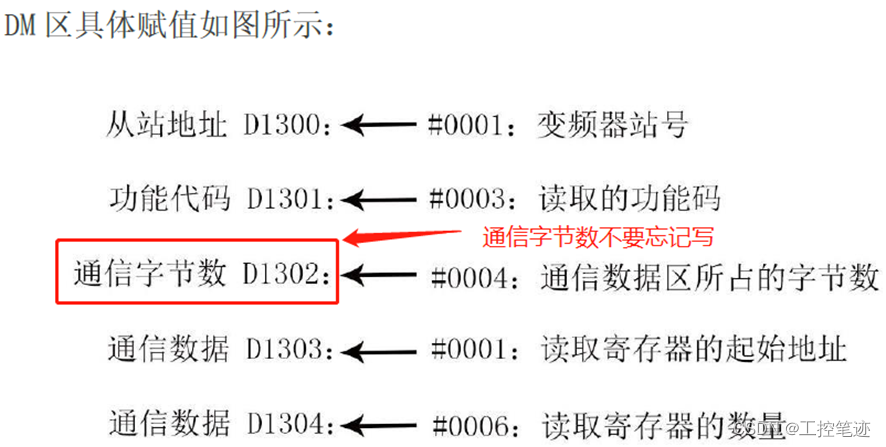
4.欧姆龙PLC侧程序编写注意事项
PLC程序编写时通讯字节数不要忘记写,如果只按照SMC案例来编写是达不到实验结果的。
五、 SMC侧配置
1.打开ACTController Menu软件,配置如下:
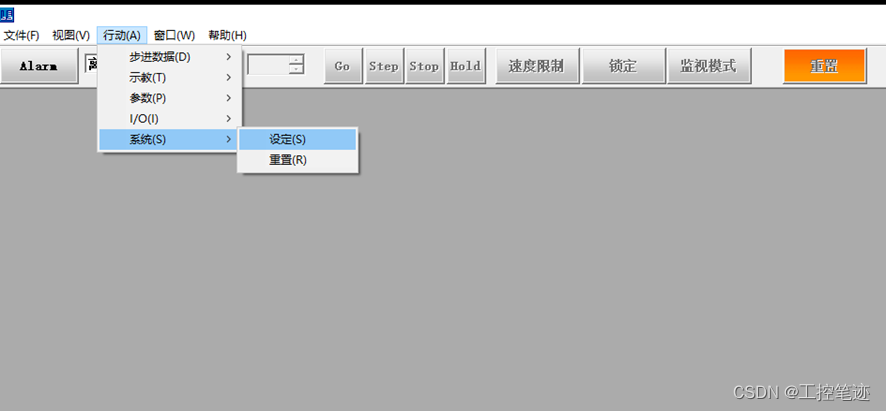

2.点击Help->选择Password,(密码:Password)配置如下:

六、SMC电缸控制程序说明
声明:本文仅列举通过操作内部继电器,来运行指定步数据的例子。通信控制器ID=1。
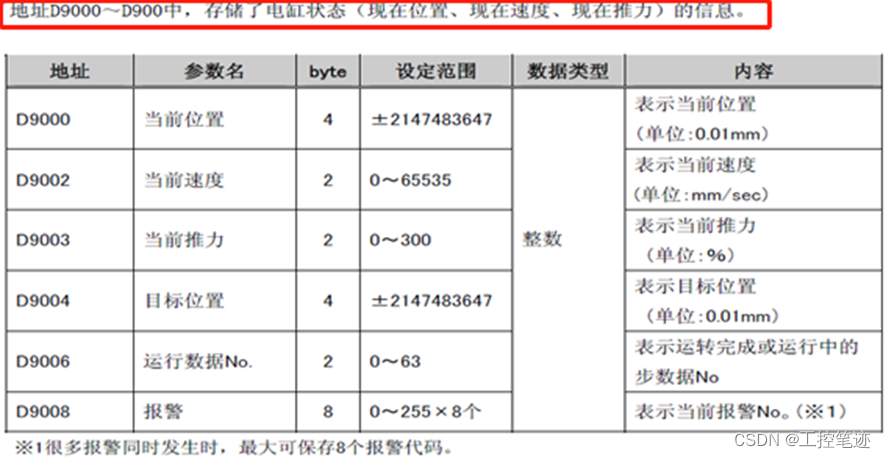
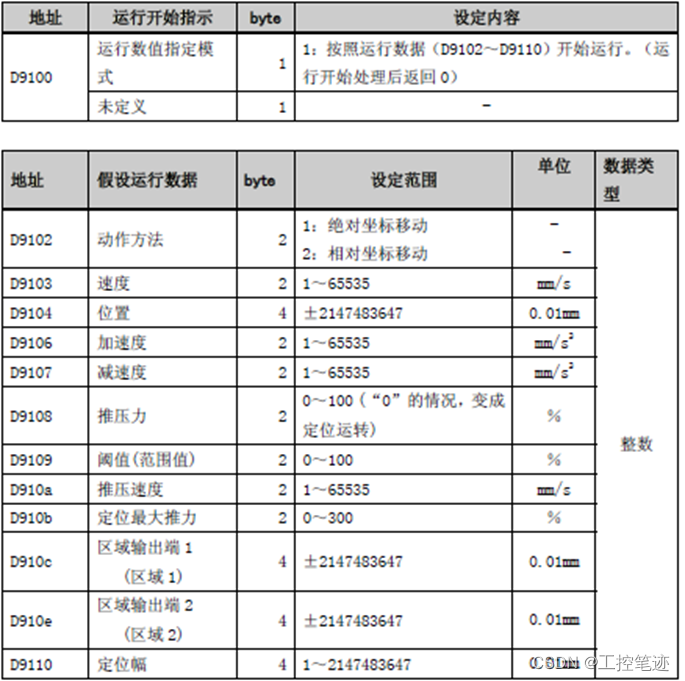
1.存储概略表:(此次仅使用红框内的内部继电器)

要区分开D9000-D9008和D9100-D9110的区别。前者使显示当前位置速度信息,后者用于执行动作时使用
SMC通信功能代码:

七、SMC电缸控制程序说明
控制器在不同的状态下输出信号的状态
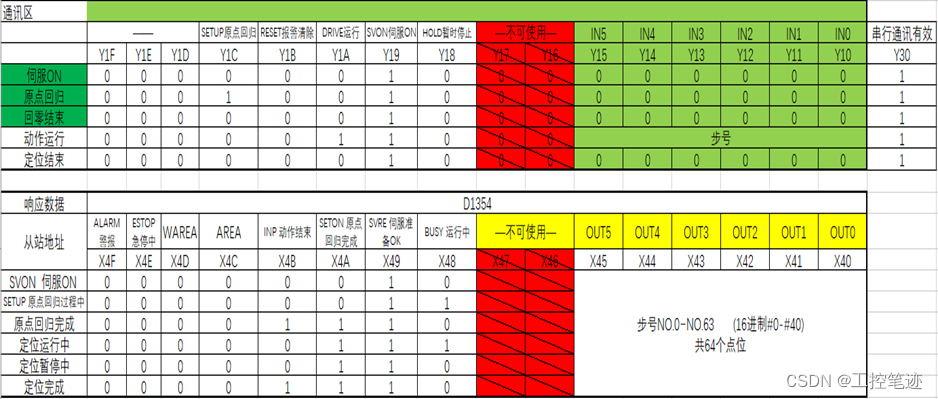
PLC地址分配布局


八、程序概述
1.动作准备
1.1 串行通讯有效(Y30=1)

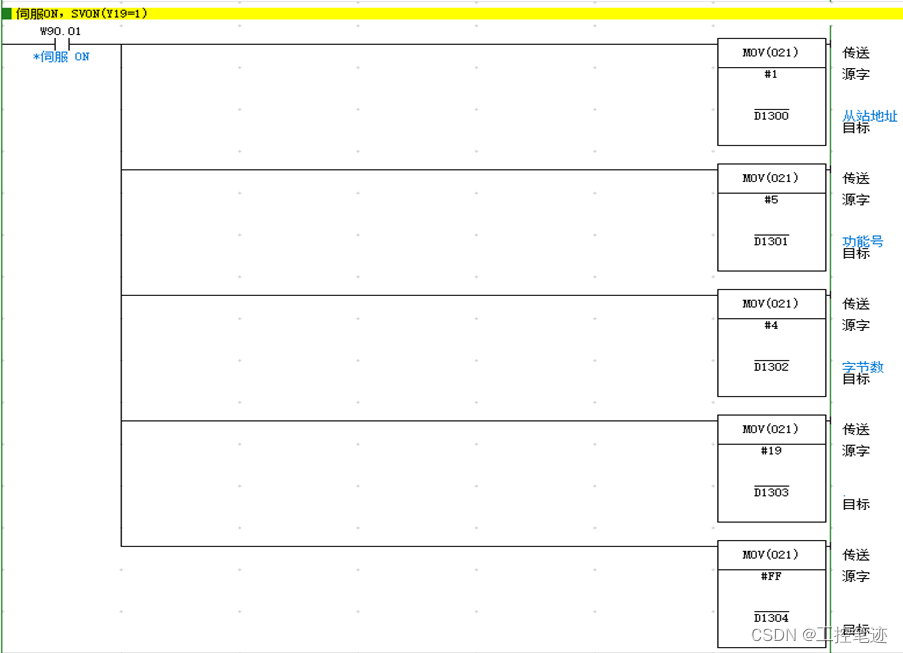
1.2 伺服ON,SVON(Y19=1)
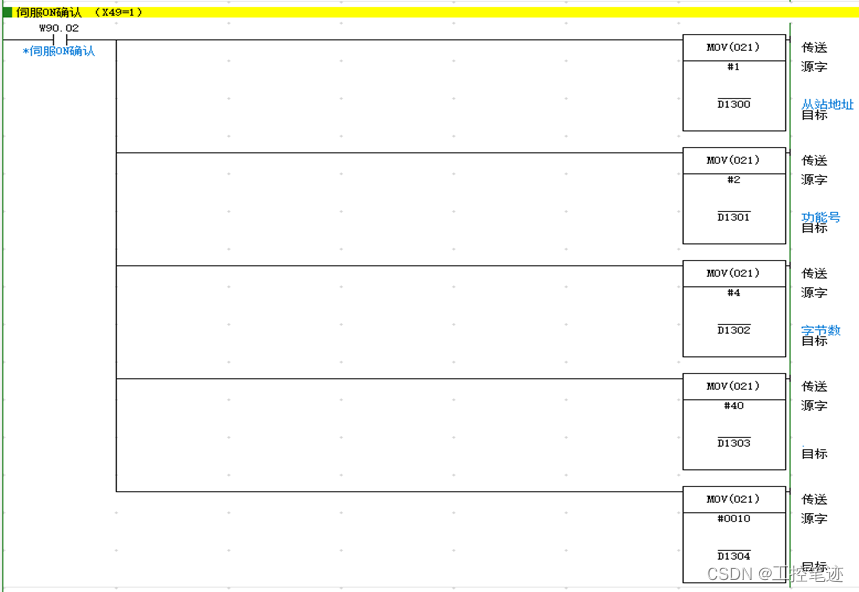
1.3 伺服ON确认
2.原点回归
2.1 原点回归 SETUP(Y1C=1)

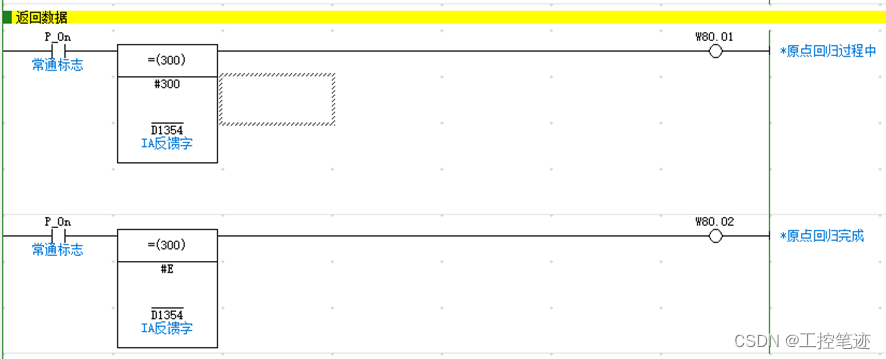
2.2 原点回归确认 SETON (X4A=1)

2.3 原点回归完了确认OK SETUP(X4A=1)
2.4 原点回归动作结束SETUP(Y1C=0)

3.动作(按步号运行)
3.1 选择步号no.
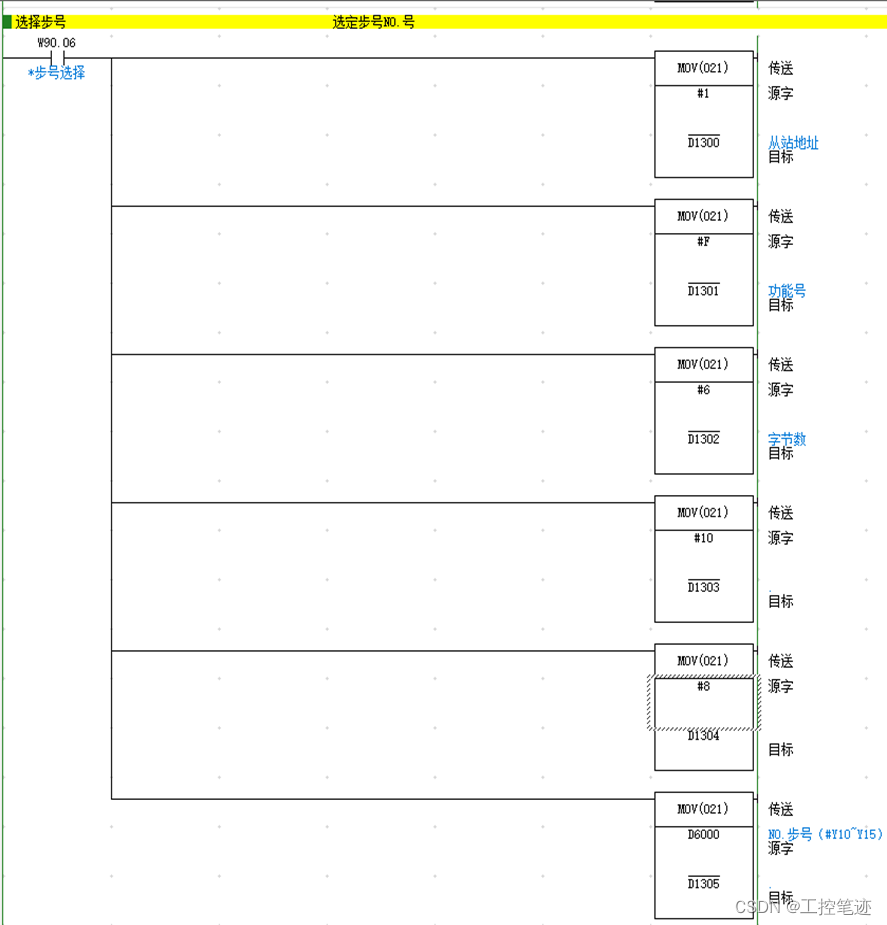
3.2 运行DRIVE(Y1A=1),开始动作;

3.3 定位完成确认INP(X4B=1)

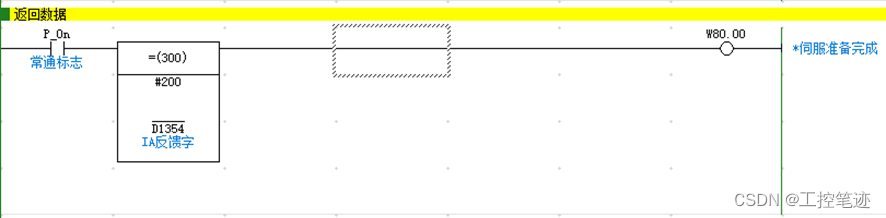
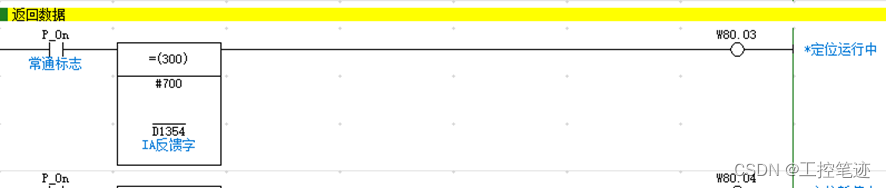
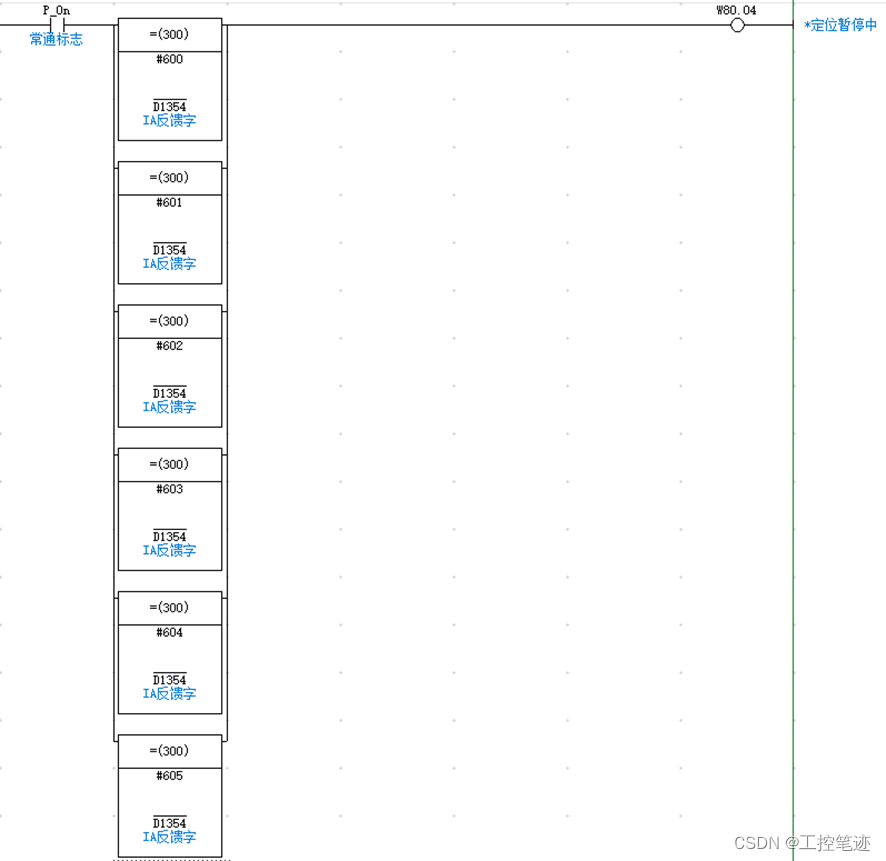
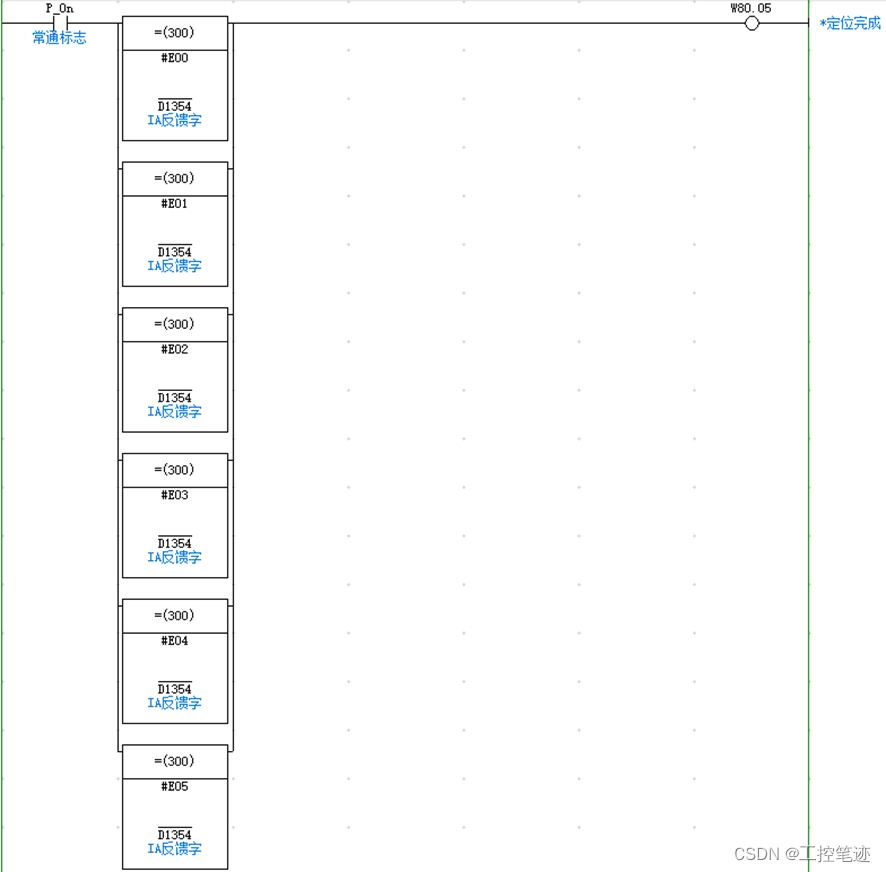
3.4 定位完成确认返回数据
3.5 动作结束DRIVE(Y1A=0)
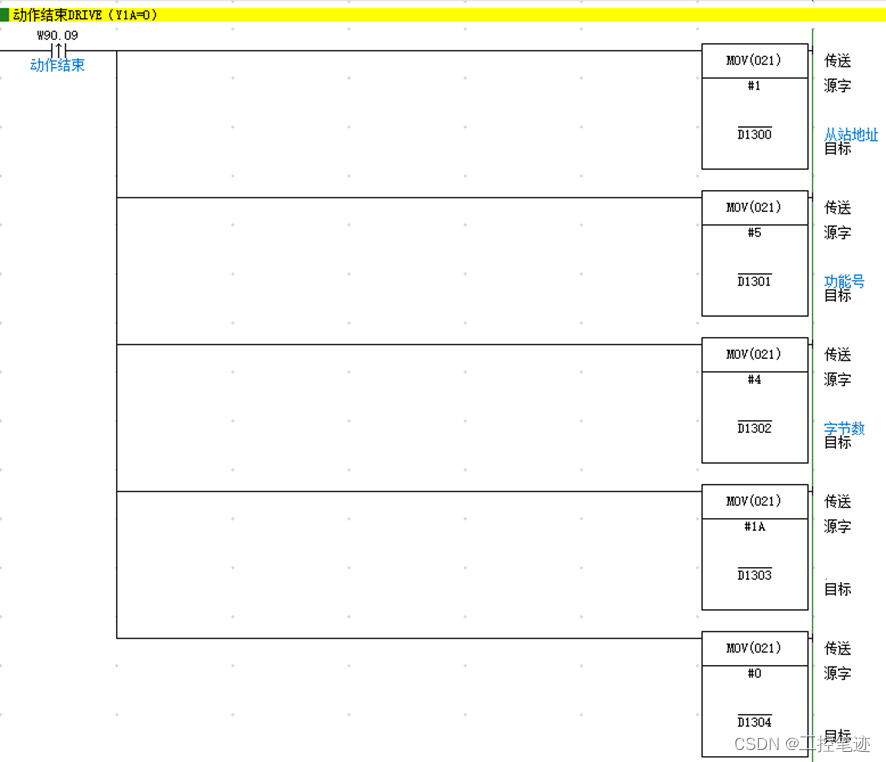
4.步数据信息编写
4.1写入“ NO * ”内的信息

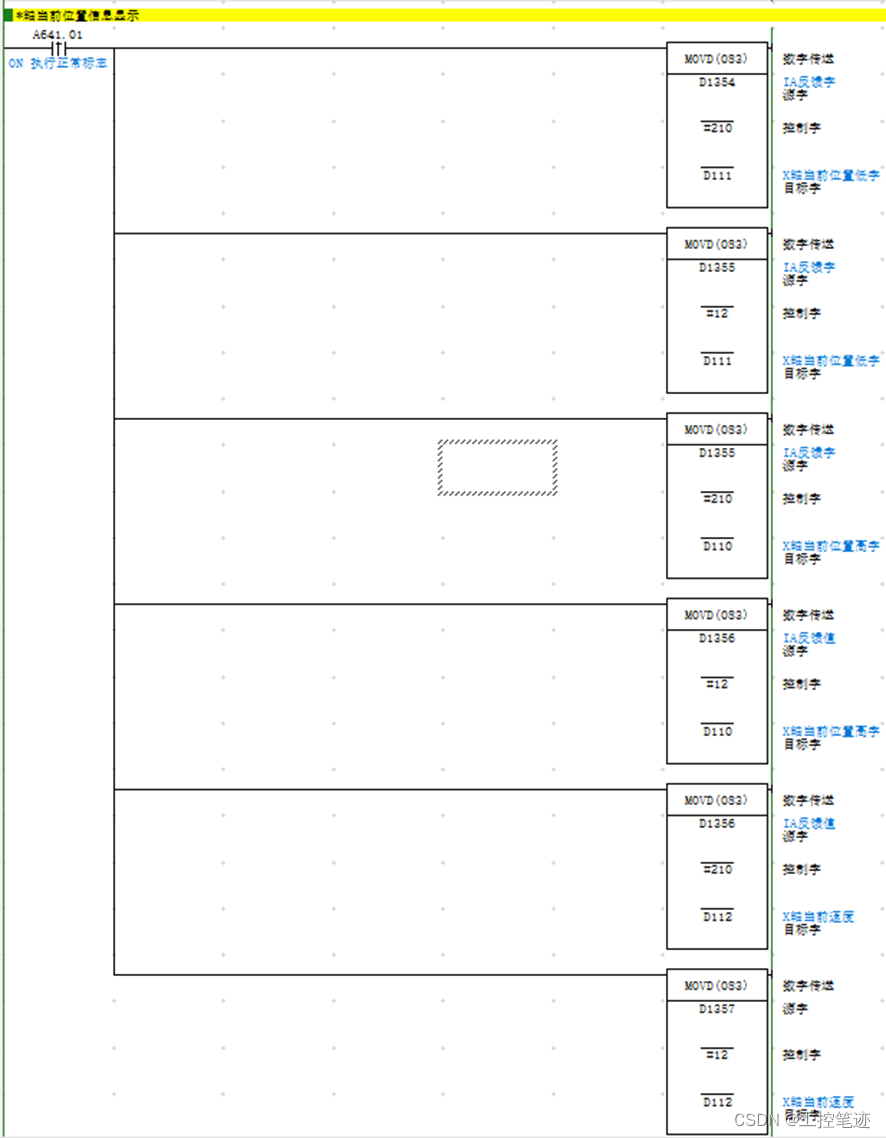
5.读取位置、速度
5.1读取当前位置速度信息

5.2当前位置速度信息显示
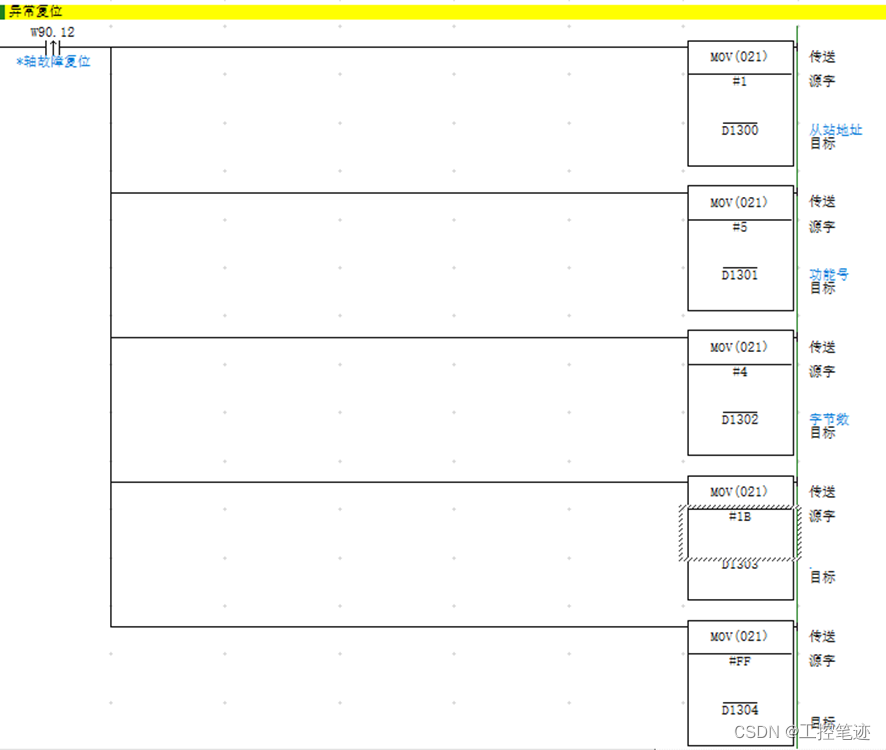
6.异常复位
6.1异常复位
九.案例总结
1.要根据应用的场合来选择是否使用Modbus RTU协议;
2. Modbus RTU协议数据传输效率高但是程序处理复杂,初次使用应用效率不高;
3.两个字节之间发送和接受时间间隔有要求,间隔不能超过3.5倍字符传输时间。如果超过3.5倍传输时间,就认为一帧数据已经接收,新的一帧数据传输开始。
4.SMC说明书中操作例与实际使用相差很大,要酌情删减;
5.OMRON操作例与SMC操作例使用有出入要弄清楚双方的“功能号”使用方法和区别。
6.拥有多个从站时应使用轮询程序。
转载声明
凡未声明为转载的内容,均属于“工控笔迹”公众号独家版权所有,未经许可不得转载或镜像;授权转载必须注明来源为"呆萌君"。未经授权擅自复制或镜像,违者必究。
















 949
949











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











