







目录
7.2 模拟正交幅度调制(Quadrature Amplitude Modulation,QAM)
8.2 调频(Frequency Modulation,FM)
前言
本笔记是基于北京都柏林学院2022年EEEN3005J Communication Theory课程课件总结出的笔记。任课教师为Dr Deepu John。
阳老板建议: 本节内容较多且学习难度较高,请细致观看。
Chapter 7 :SSB and QAM
7.1 单边带AM
我们已经学到(没学到的请看前两课复习一下 ( ง⁼̴̀ω⁼̴́)ง⁼³₌₃ ):
•Full AM:频谱包含两个边带和载波
•DSB-SC:频谱包含两个边带,但载波已移除
现在的问题是,为什么要同时发送两个边带?它们肯定包含一些信息吗?我们不是在不必要地使用有价值的频谱吗?
顾名思义,单边带调幅(SSB-AM)是一种只传输一个边带的调幅形式。
由于DSB-SC(或全AM)信号中的每个边带都包含所有信息,因此可以使用任一边带。
这就产生了两种形式的SSB:
•USB,仅传输上边带。(upper sideband)
•LSB,仅传输下边带。(lower sideband)
如图7.1.1所示:

值得一提的是:
•SSB信号的功率是DSB-SC信号的一半(对于相同的边带振幅),这比完整AM所需的要少得多。
•SSB信号的带宽等于信息信号的带宽,这是DSB-SC或全AM信号的一半。
因此,单边带是带宽效率最高的振幅调制形式。
7.1.1 调制
最简单的方法是生成DSB-SC信号,然后使用滤波器去除不需要的边带。对于实滤波器,这种方法需要边带之间有一个合理的间隙,信息信号不能延伸到DC。
7.1.2 解调
可以使用同步解调器。仅从接收到的SSB信号中同步本地振荡器是非常困难的,因此一些系统传输一个称为导频信号的小载波分量来辅助这一过程。
7.2 模拟正交幅度调制(Quadrature Amplitude Modulation,QAM)
概述——见第3章,特别是方程式3.3.2。(对应第二篇博客¦•ˇ₃ˇ•。))
考虑两个基带信息信号x(t)和y(t),每个带宽W。
这些信号可以通过以下方式被联合调制为正交幅度调制(QAM)信号:
![]()
该QAM信号的带宽为2W,等于组合的信息信号的带宽。
因此,QAM的带宽效率等于SSB调制的带宽效率。
QAM的缺点是它只需要90度的两个载波之间的相位差,并且还需要本地振荡器的精确相位同步。
7.2.1 调制
QAM调制器如图7.2.1所示。

正交载波由本地振荡器通过90°的相移产生◦
7.2.2 解调
QAM使用同步解调器,如图7.2.2所示。
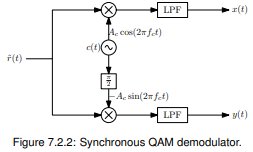
为了验证该电路工作正常,必须考虑X(t)和Y(t)的解调。让接收到的信号:
![]()
假设本地振荡器(LO)是完全同步的,即:
![]()
得出:
![]()
LPF删除2fc周围的项,根据需要给出x(t)。
Chapter 8 :Angle Modulation
回想一下,调制是一个过程,其中调制信号用于改变正弦载波信号的某些特性。到目前为止,我们只考虑了振幅调制,其中载波的振幅是变化的。
在角度调制中,载波的振幅保持不变,而载波的相位角变化以传递信息。调制信号的形式如下:
![]()
其中θ (t) 变化以传递信息信号g (t) 。
如前所述,g (t) 被假定为带宽为W的基带信号。
那么φ(t)=2π*fc*t+θ(t)是不包含任何信息(即不依赖于g(t))的线性项2π*fc*t和θ(t)的和,θ(t)可以看成是g(t)的函数。
线性项2π*fc*t可视为正弦载波相位的标称值。
θ(t)项是与该标称阻抗的相位偏差θ(t)。(这句我翻译的不是太好,将原文摆上了ꈍ◡ꈍ )
The θ (t) term is the phase deviation θ (t) from this nominal value.
8.1 相位调制(Phase Modulation,PM)
在相位调制中,载波的相位围绕其标称值变化,变化量与调制信号的值成比例,即:
![]()
其中,常数kp称为调制器的相位灵敏度,它确定信息信号中给定变化的相位角变化。然后,相位调制信号为:
![]()
8.2 调频(Frequency Modulation,FM)
这是一个过程,正弦载波的瞬时频率围绕其标称值变化,变化量与调制信号的值成比例。
在继续之前,我们需要定义恒幅信号的瞬时频率。
定义:恒定振幅信号的瞬时频率s˜(t) = Ac cos (φ (t))为:

这个等式的解释如下:
正弦波的相位是角度的变化率,例如,频率恒定的正弦波的相位随时间线性增加。频率越高,V相时间图的斜率越高。
所以我们有![]() 但它的单位是rads/sec,我们希望fi(t)的单位是赫兹 (cycles/sec)。
但它的单位是rads/sec,我们希望fi(t)的单位是赫兹 (cycles/sec)。
由于在一个周期中有2π弧度,我们需要1/2π的比例因子,从而得出方程8.2.1。
我们可以将方程(8.2.1)倒置,得到:
![]()
对于FM,我们说我们将根据调制信号改变瞬时频率的标称值,即:
![]()
常数kf被称为调制器的频率灵敏度,它确定信息信号中给定变化的瞬时频率变化。

调频信号是:

所以我们可以认为这是相位偏移的相位调制是![]() 而不是
而不是 ![]()
这一观察结果使我们能够从相位调制器中制作出频率调制器,正如我们现在看到的那样。
如果我们定义:
![]()
然后我们可以将FM信号表示为:
![]()
这是FM信号,给定调制信号g(t),但它也是PM信号,给定调制信号f(t)。
这表明相位调制和频率调制之间存在关系。
这种关系如图8.2.1所示。

请注意,f(t)是通过积分从g(t)导出的,因此也是带宽为W的基带信号(积分是线性运算,不会引入新的频率分量)。
反之亦然,即PM调制器可以通过微分器和FM调制器的级联实现,如图8.2.2所示

















 4215
4215











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









