







一.TTY子系统
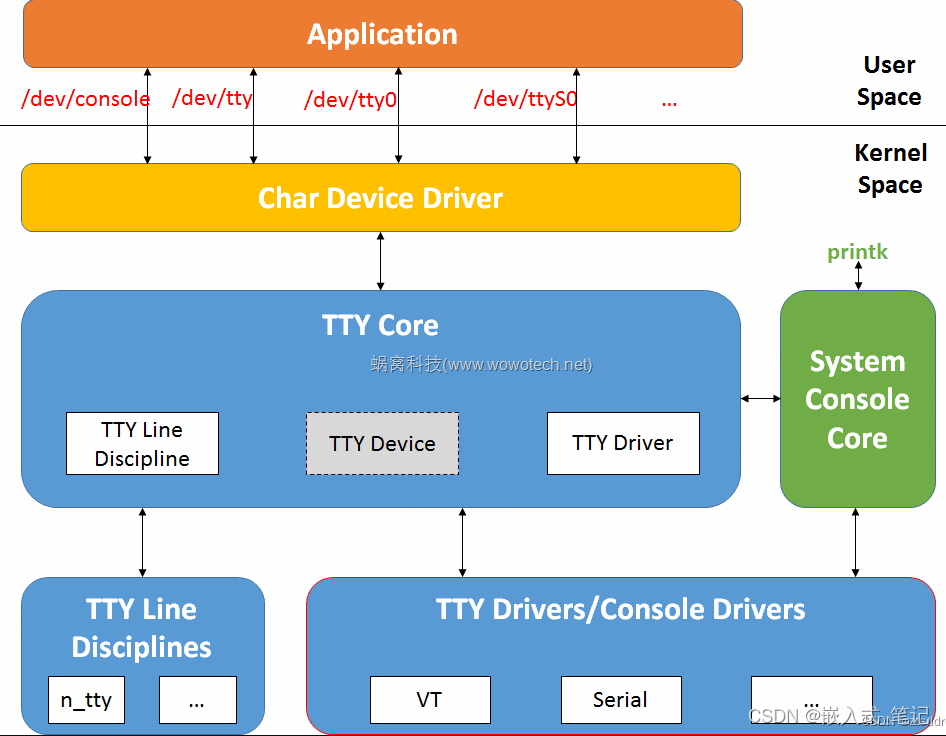
在Linux kernel中,tty驱动不像于spi,iic等那么架构简单,它是一个庞大的系统,它的框架大体如下图一。我们作为普通的驱动开发移植人员,不会从零写tty驱动,一般都是厂家根据现有的tty驱动和自家芯片修改,拿到板子按照厂家的配置,串口应该使能直接使用的。但是开发的过程中也有可能需要用到串口,一般会修改serial驱动,这样我们不会动tty_core层。
Linux tty子系统包含:tty核心(tty_core),tty线路规程(tty_line_discipine)和tty驱动(tty_driver)。tty核心是对整个tty设备的抽象,对用户提供统一的接口,tty线路规程是对传输数据的格式化,tty驱动则是面向tty设备的硬件驱动。其整体框架如下图所示:
二.UART 驱动关键数据结构
同 I2C、SPI 一样,Linux 也提供了串口驱动框架,我们只需要按照相应的串口框架编写驱 动程序即可。串口驱动没有什么主机端和设备端之分,就只有一个串口驱动,而且这个驱动也 已经由 原厂编写好了,我们真正要做的就是在设备树中添加所要使用的串口节点信 息。当系统启动以后串口驱动和设备匹配成功,相应的串口就会被驱动起来,生成 /dev/ttymxcX(X=0….n)文件。
struct uart_driver:
uart_driver 包含了串口设备名,串口驱动名,主次设备号,串口控制台(可选))等信息,还封装了tty_driver (底层串口驱动无需关心tty_driver)
struct uart_driver {
struct module *owner; /*拥有该uart_driver的模块,一般为THIS_MODULE*/
const char *driver_name; /*驱动串口名,串口设备名以驱动名为基础*/
const char *dev_name; /*串口设备名*/
int major; /*主设备号*/
int minor; /*次设备号*/
int nr; /*该uart_driver支持的串口数*/
struct console *cons; /*其对应的console,若该uart_driver支持serial console,
*否则为NULL*/
/*
* these are private; the low level driver should not
* touch these; they should be initialised to NULL
*/
struct uart_state *state; /*下层,窗口驱动层*/
struct tty_driver *tty_driver; /*tty相关*/
struct console
实现控制台打印功能必须要注册的结构体
struct console {
char name[16];
void(*write)(struct console *,const char *, unsigined);
int (*read)(struct console *, char *, unsigned);
struct tty_driver *(struct console *,int*);
void (*unblank)(void);
int (*setup)(struct console *, char *);
int (*early_setup)(void);
short flags;
short index; /*用来指定该console使用哪一个uart port (对应的uart_port中的line),如果为-1,kernel会自动选择第一个uart port*/
int cflag;
void *data;
struct console *next;
};
struct uart_state:
每一个uart端口对应着一个uart_state,该结构体将uart_port与对应的circ_buf联系起来。uart_state有两个成员在底层串口驱动会用到:xmit和port。
用户空间程序通过串口发送数据时,上层驱动将用户数据保存在xmit;而串口发送中断处理函数就是通过xmit获取到用户数据并将它们发送出去。串口接收中断处理函数需要通过port将接收到的数据传递给线路规程层。
struct uart_state {
struct tty_port port;
enum uart_pm_state pm_state;
struct circ_buf xmit;
struct uart_port *uart_port; /*对应于一个串口设备*/
};
struct uart_port:
uart_port用于描述串口端口的I/O端口或I/O内存地址、FIFO大小、端口类型、串口时钟等信息。实际上,一个uart_port实现对应一个串口设备。
struct uart_port {
spinlock_t lock; /* port lock */
unsigned long iobase; /* in/out[bwl] */
unsigned char __iomem *membase; /* read/write[bwl] */
unsigned int (*serial_in)(struct uart_port *, int);
void (*serial_out)(struct uart_port *, int, int);
void (*set_termios)(struct uart_port *,
struct ktermios *new,
struct ktermios *old);
int (*handle_irq)(struct uart_port *);
void (*pm)(struct uart_port *, unsigned int state,
unsigned int old);
void (*handle_break)(struct uart_port *);
unsigned int irq; /* irq number */
unsigned long irqflags; /* irq flags */
unsigned int uartclk; /* base uart clock */
unsigned int fifosize; /* tx fifo size */
unsigned char x_char; /* xon/xoff char */
unsigned char regshift; /* reg offset shift */
unsigned char iotype; /* io access style */
unsigned char unused1;
#define UPIO_PORT (0)
#define UPIO_HUB6 (1)
#define UPIO_MEM (2)
#define UPIO_MEM32 (3)
#define UPIO_AU (4) /* Au1x00 and RT288x type IO */
#define UPIO_TSI (5) /* Tsi108/109 type IO */
unsigned int read_status_mask; /* driver specific */
unsigned int ignore_status_mask; /* driver specific */
struct uart_state *state; /* pointer to parent state */
struct uart_icount icount; /* statistics */
struct console *cons; /* struct console, if any */
#if defined(CONFIG_SERIAL_CORE_CONSOLE) || defined(SUPPORT_SYSRQ)
unsigned long sysrq; /* sysrq timeout */
#endif
upf_t flags;
#define UPF_FOURPORT ((__force upf_t) (1 << 1))
#define UPF_SAK ((__force upf_t) (1 << 2))
#define UPF_SPD_MASK ((__force upf_t) (0x1030))
#define UPF_SPD_HI ((__force upf_t) (0x0010))
#define UPF_SPD_VHI ((__force upf_t) (0x0020))
#define UPF_SPD_CUST ((__force upf_t) (0x0030))
#define UPF_SPD_SHI ((__force upf_t) (0x1000))
#define UPF_SPD_WARP ((__force upf_t) (0x1010))
#define UPF_SKIP_TEST ((__force upf_t) (1 << 6))
#define UPF_AUTO_IRQ ((__force upf_t) (1 << 7))
#define UPF_HARDPPS_CD ((__force upf_t) (1 << 11))
#define UPF_LOW_LATENCY ((__force upf_t) (1 << 13))
#define UPF_BUGGY_UART ((__force upf_t) (1 << 14))
#define UPF_NO_TXEN_TEST ((__force upf_t) (1 << 15))
#define UPF_MAGIC_MULTIPLIER ((__force upf_t) (1 << 16))
/* Port has hardware-assisted h/w flow control (iow, auto-RTS *not* auto-CTS) */
#define UPF_HARD_FLOW ((__force upf_t) (1 << 21))
/* Port has hardware-assisted s/w flow control */
#define UPF_SOFT_FLOW ((__force upf_t) (1 << 22))
#define UPF_CONS_FLOW ((__force upf_t) (1 << 23))
#define UPF_SHARE_IRQ ((__force upf_t) (1 << 24))
#define UPF_EXAR_EFR ((__force upf_t) (1 << 25))
#define UPF_BUG_THRE ((__force upf_t) (1 << 26))
/* The exact UART type is known and should not be probed. */
#define UPF_FIXED_TYPE ((__force upf_t) (1 << 27))
#define UPF_BOOT_AUTOCONF ((__force upf_t) (1 << 28))
#define UPF_FIXED_PORT ((__force upf_t) (1 << 29))
#define UPF_DEAD ((__force upf_t) (1 << 30))
#define UPF_IOREMAP ((__force upf_t) (1 << 31))
#define UPF_CHANGE_MASK ((__force upf_t) (0x17fff))
#define UPF_USR_MASK ((__force upf_t) (UPF_SPD_MASK|UPF_LOW_LATENCY))
unsigned int mctrl; /* current modem ctrl settings */
unsigned int timeout; /* character-based timeout */
unsigned int type; /* port type */
const struct uart_ops *ops;
unsigned int custom_divisor;
unsigned int line; /* port index */
resource_size_t mapbase; /* for ioremap */
struct device *dev; /* parent device */
unsigned char hub6; /* this should be in the 8250 driver */
unsigned char suspended;
unsigned char irq_wake;
unsigned char unused[2];
void *private_data; /* generic platform data pointer */
};
struct uart_ops:
struct uart_ops涵盖了驱动可对串口的所有操作
struct uart_ops {
unsigned int (*tx_empty)(struct uart_port *);
void (*set_mctrl)(struct uart_port *, unsigned int mctrl);
unsigned int (*get_mctrl)(struct uart_port *);
void (*stop_tx)(struct uart_port *);
void (*start_tx)(struct uart_port *);
void (*throttle)(struct uart_port *);
void (*unthrottle)(struct uart_port *);
void (*send_xchar)(struct uart_port *, char ch);
void (*stop_rx)(struct uart_port *);
void (*enable_ms)(struct uart_port *);
void (*break_ctl)(struct uart_port *, int ctl);
int (*startup)(struct uart_port *);
void (*shutdown)(struct uart_port *);
void (*flush_buffer)(struct uart_port *);
void (*set_termios)(struct uart_port *, struct ktermios *new,
struct ktermios *old);
void (*set_ldisc)(struct uart_port *, int new);
void (*pm)(struct uart_port *, unsigned int state,
unsigned int oldstate);
int (*set_wake)(struct uart_port *, unsigned int state);
/*
* Return a string describing the type of the port
*/
const char *(*type)(struct uart_port *);
/*
* Release IO and memory resources used by the port.
* This includes iounmap if necessary.
*/
void (*release_port)(struct uart_port *);
/*
* Request IO and memory resources used by the port.
* This includes iomapping the port if necessary.
*/
int (*request_port)(struct uart_port *);
void (*config_port)(struct uart_port *, int);
int (*verify_port)(struct uart_port *, struct serial_struct *);
int (*ioctl)(struct uart_port *, unsigned int, unsigned long);
#ifdef CONFIG_CONSOLE_POLL
int (*poll_init)(struct uart_port *);
void (*poll_put_char)(struct uart_port *, unsigned char);
int (*poll_get_char)(struct uart_port *);
#endif
};
三.UART关键流程
注册uart_driver:

此接口在uart driver中调用,用来注册uart_driver到kernel中,调用阶段在uart driver的初始阶段,例如:module_init(), uart_driver的注册流程图。
添加uart_port:
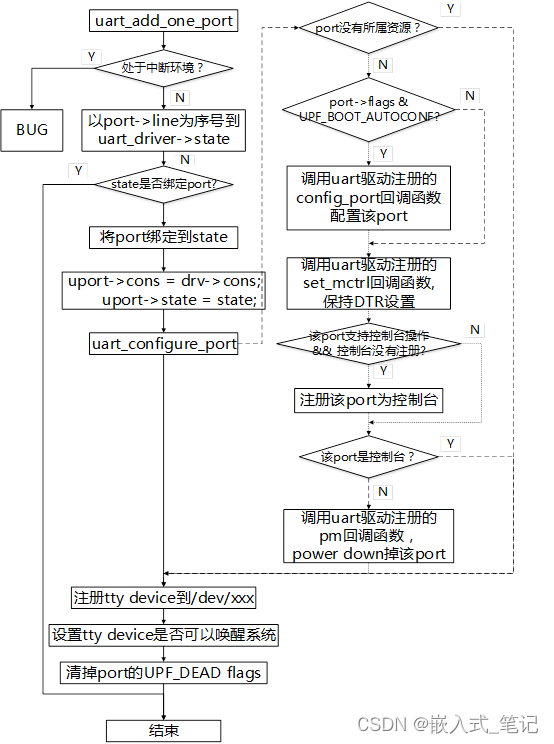
此接口用于注册一个uart port 到uart driver上,通过注册,uart driver就可以访问对应的uart port,进行数据收发。该接口在uart driver中的probe函数调用,必须保证晚于uart_register_drver的注册过程。
打开设备(open操作):

数据发送流程(write操作):

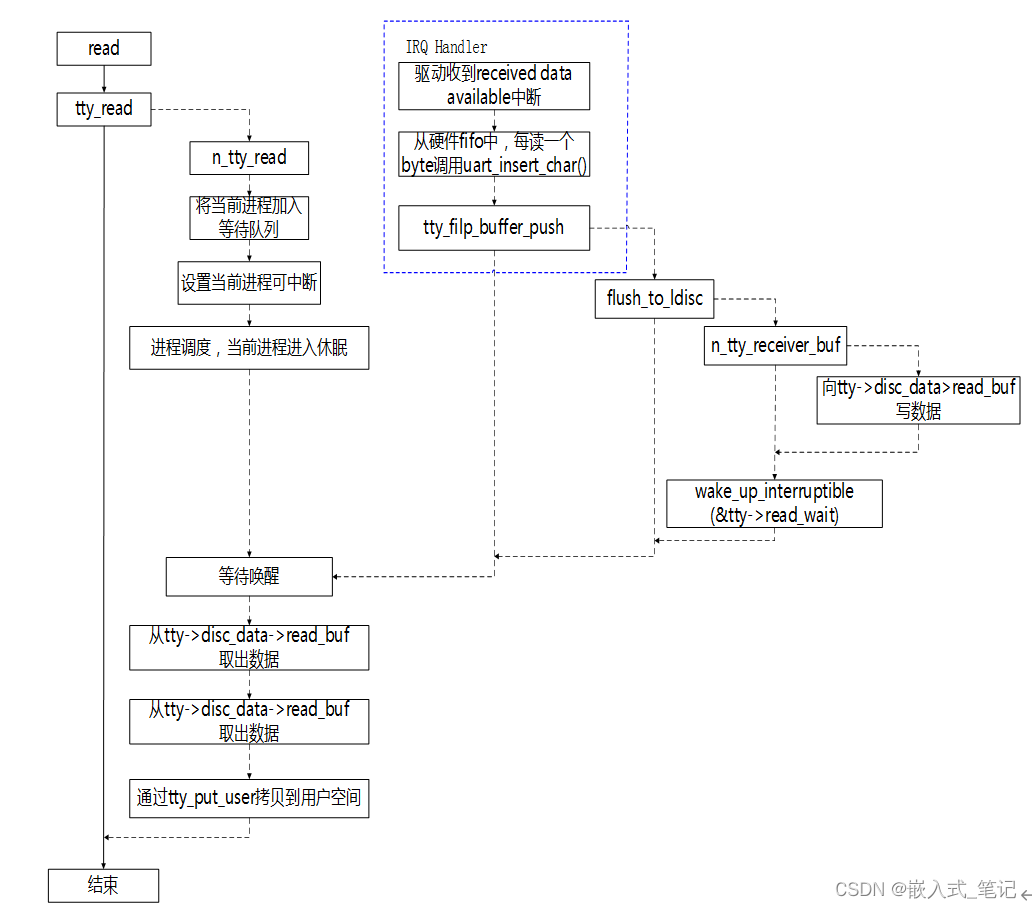
数据接收流程(read操作) :
关闭设备(close操作):

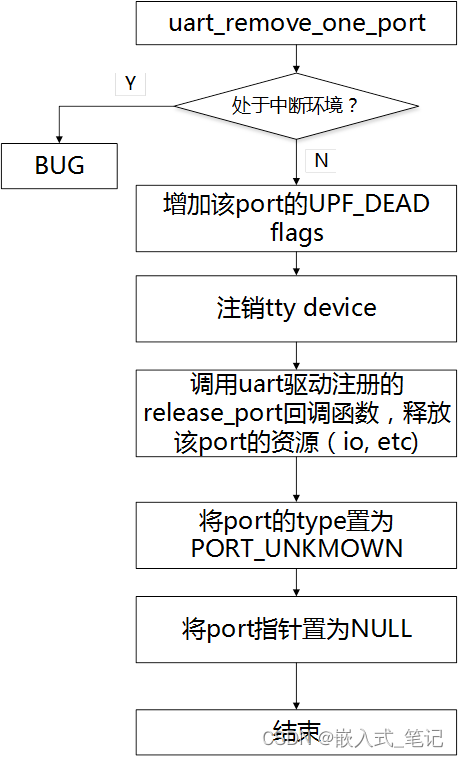
除uart_port:
此接口用于从uart driver上注销一个uart port,该接口在uart driver中的remove函数中调用。
四.RS-232通信
(1) 基本概念
RS-232接口符合美国电子工业联盟(EIA)制定的串行数据通信的接口标准,被广泛用于计算机串行接口外设连接,像有些老式PC机上就配置有RS232接口。RS232的工作方式是单端工作方式,这是一种不平衡的传输方式,收发端信号的逻辑电平都是相对于信号地而言的,RS232最初是DTE(数字终端设备)和DCE(数据通信设备)一对一通信,也就是点对点,一般是用于全双工传送,也可以用于半双工传送。
采用负逻辑传送,规定逻辑“1”的电平为-5V~-15 V,逻辑“0”的电平为+5 V~+15 V。选用该电气标准的目的在于提高抗干扰能力,增大通信距离。RS -232的噪声容限为2V,接收器将能识别高至+3V的信号作为逻辑“0”,将低到-3 V的信号作为逻辑“1”。
传输距离短,只有15米,实际应用可以达到50米,再长的距离就须加调制了。
RS232标准物理接口是25个引脚的,因为常用的是9个引脚,后来基本采用DB9连接器了。
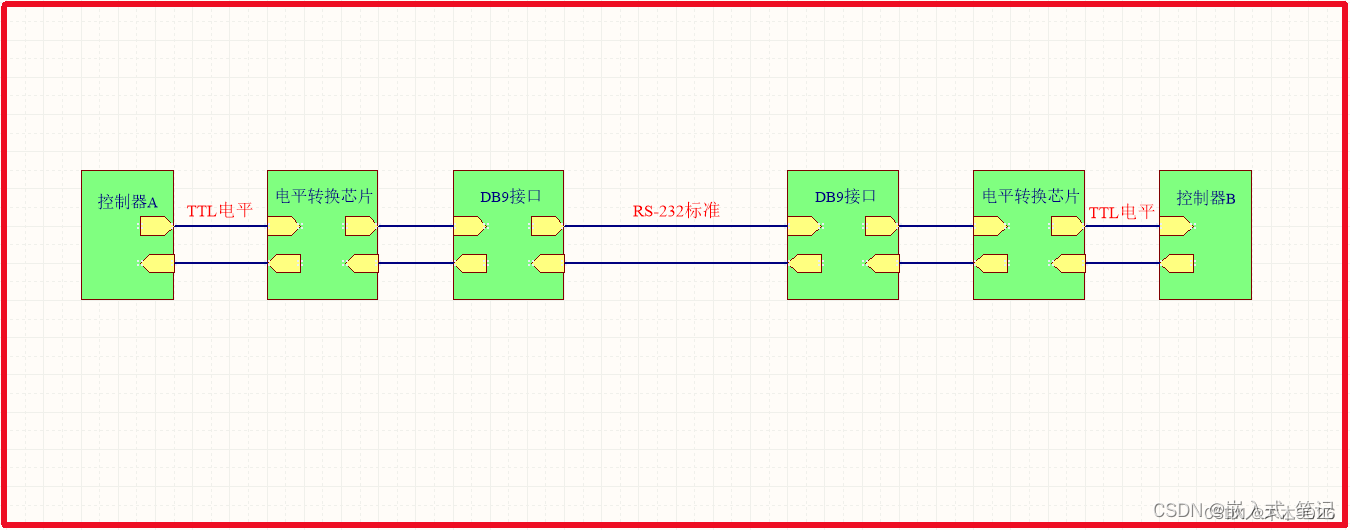
RS-232标准主要规定了信号用途、通讯接口和信号电平标准。如下图为常见的设备间串口通讯结构图。
下面介绍下DB9接口。如下图为DB9标准的公头、母头接法(接线口以针式引出信号线为公头,以孔式引出信号线为母头)。

如上图,以公头为例,有9条信号线,其中,
RXD:用于接收DCE发来的数据信号,即输入;
TXD:用于发送DTE的信号,即输出。公头和母头的RXD和TXD应交叉连接;
GND:用于平衡设备双方的地电位,即共地。
其他信号线如DCD、DTR、DSR、RTS、CTS等,使用逻辑1表示有效信号,逻辑0表示无效信号。如DTE端的RTS信号线置1时,是为了告知DCE设备本机已准备好 接收数据,而置0则表示未准备就绪。
(2)通信方式
RS232 可做到双向传输,全双工通讯,最高传输速率 20kbps。
(3)与UART异同点
逻辑电平不同:UART是TTL电平,RS232是RS232电平,不能直接相连,需要电平转换芯片(MAX3232等)。
协议层完全相同:UART和RS232的协议层可以共享,没有较大区别。
(4)缺点
接口电平值较高,易损坏接口电路的芯片;又因为与TTL电平不兼容故需使用电平转换电路方能与TTL电路连接。
传输速率较低,大约为20Kbps;传输距离较短,大约为15米左右。
接口由三根线TX、RX、GND组成,没有构成差分线形式,容易产生共地共模干扰,抗干扰能力弱。
















 1347
1347











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











