







 超级会员免费看
超级会员免费看
一.硬件原理图
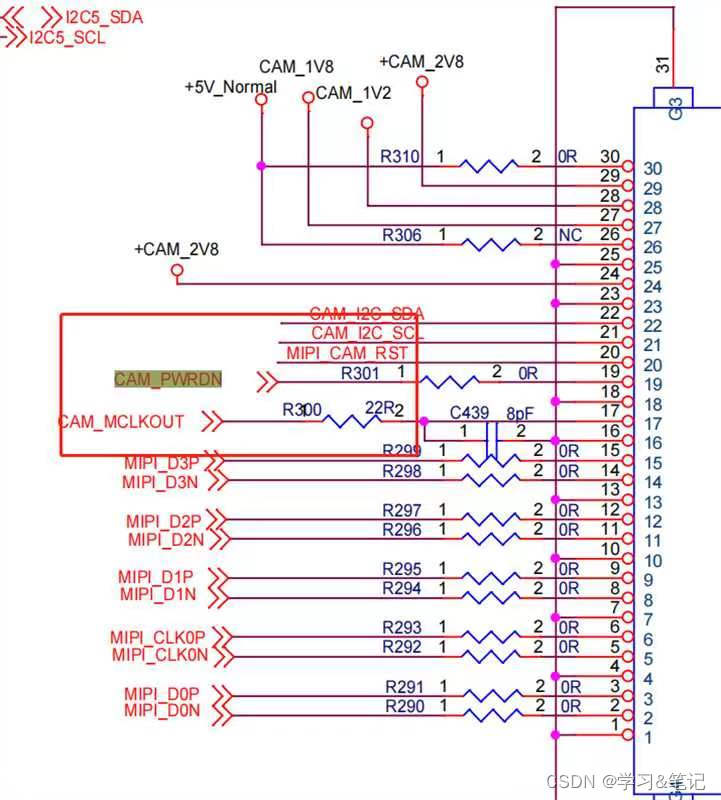
mipi摄像头硬件确认点:
1.供电:5V,2.8V,1.2V,1.8V,reset脚(硬拉3.3,上电的时候从低到高),pwron脚外接
3.3V。
2,时钟:MCLKOUT是24兆时钟。
3.4组差分mipi线。mipi的data线的波形为方波。
二.驱动移植
RK提供的默认sdk里面已经将支持的所有摄像头驱动都添加到了内核,所以不需要移植该驱动了。
需确认下移植驱动对应的一些信息
源程序
kernel/drivers/media/i2c/imx586.c
kernel/drivers/media/i2c/Makefile
kernel/drivers/media/i2c/Kconfig
kernel/arch/arm64/configs/rockchip_linxu_defconfig
Makefile脚本
obj-$(CONFIG_VIDEO_IMX415) += imx586.o
config VIDEO_IMX586
tristat
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2182
2182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











