







一.V4L2内存介绍
V4L2使用的内存一般是通过mmap的方式将内存映射到用户空间进行拷贝的。
mmap 即 memory map,也就是内存映射。
mmap 是一种内存映射文件的方法,即将一个文件或者其它对象映射到进程的地址空间,实现文件磁盘地址和进程虚拟地址空间中一段虚拟地址的一一对映关系。实现这样的映射关系后,进程就可以采用指针的方式读写操作这一段内存,而系统会自动回写脏页面到对应的文件磁盘上,即完成了对文件的操作而不必再调用 read、write 等系统调用函数。相反,内核空间对这段区域的修改也直接反映用户空间,从而可以实现不同进程间的文件共享。如下图所示:
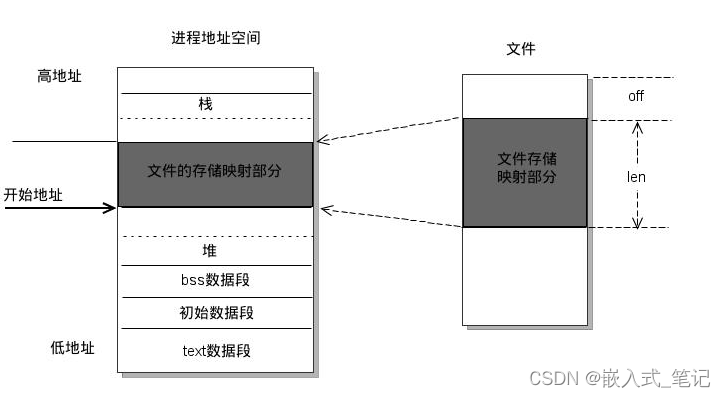
在用户空间看来,通过 mmap 机制以后,磁盘上的文件仿佛直接就在内存中,把访问磁盘文件简化为按地址访问内存。这样一来,应用程序自然不需要使用文件系统的 write(写入)、read(读取)、fsync(同步)等系统调用,因为现在只要面向内存的虚拟空间进行开发。
二.申请缓存VIDIOC_REQBUFS
从应用调用vivi驱动分析v4l2 -- 申请缓存(VIDIOC_REQBUFS)_v4l2释放所有缓冲区-CSDN博客
申请缓存:
struct v4l2_requestbuffers
{
__u32 count; // 缓冲区内缓冲帧的数目
enum v4l2_buf_type type; // 缓冲帧数据格式
enum v4l2_memorymemory; // 区别是内存映射还是用户指针方式
__u32 reserved[2];
};struct v4l2_requestbuffers req;
req.count = nr_bufs; //缓存数量
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
if (ioctl(fd, VIDIOC_REQBUFS, &req) < 0)这里会调用到v4l_reqbufs
v4l_reqbufs
-> vidioc_reqbufs
-> vb2_reqbufs
-> vb2_core_reqbufs
-> queue_setup
-> vb2_core_reqbufs
-> __vb2_queue_alloc
-> kzalloc三.查询缓存信息VIDIOC_QUERYBUF
查询并映射缓存 :
该结构体表示一帧图像数据的基本信息,包含序号、缓冲帧长度和缓冲帧地址等信息。
struct v4l2_buffer
{
__u32 index; //buffer 序号
enum v4l2_buf_type type; //buffer 类型
__u32 byteused; //buffer 中已使用的字节数
__u32 flags; // 区分是 MMAP 还是 USERPTR
enum v4l2_field field;
struct timeval timestamp; // 获取第一个字节时的系统时间
struct v4l2_timecode timecode;
__u32 sequence; // 队列中的序号
enum v4l2_memory memory; //IO 方式,被应用程序设置12 union m
{
__u32 offset; // 缓冲帧地址,只对 MMAP 有效
unsigned long userptr;
};
__u32 length; // 缓冲帧长度
__u32 input;
__u32 reserved;
};memset(&v4l2_buffer, 0, sizeof(struct v4l2_buffer));
v4l2_buffer.index = i; //想要查询的缓存
v4l2_buffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buffer.memory = V4L2_MEMORY_MMAP;
/* 查询缓存信息 */
ret = ioctl(fd, VIDIOC_QUERYBUF, &v4l2_buffer);mmap一般都是配合VIDIOC_QUERYBUF使用:
for (n_buffers = 0; n_buffers < req.count; ++n_buffers)
{
struct v4l2_buffer buf;
CLEAR (buf);
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
if (-1 == ioctl (fd, VIDIOC_QUERYBUF, &buf))
printf ("VIDIOC_QUERYBUF error\n");
buffers[n_buffers].length = buf.length;
buffers[n_buffers].start =
mmap (NULL /* start anywhere */,
buf.length,
PROT_READ | PROT_WRITE /* required */,
MAP_SHARED /* recommended */,
fd, buf.m.offset);
if (MAP_FAILED == buffers[n_buffers].start)
printf ("mmap failed\n");
}mmap对应驱动的 videox的fops也就是 v4l2_fops的mmap
static int v4l2_mmap(struct file *filp, struct vm_area_struct *vm)
{
struct video_device *vdev = video_devdata(filp);
int ret = -ENODEV;
if (!vdev->fops->mmap)
return -ENODEV;
if (video_is_registered(vdev))
ret = vdev->fops->mmap(filp, vm);
if (vdev->dev_debug & V4L2_DEV_DEBUG_FOP)
dprintk("%s: mmap (%d)\n",
video_device_node_name(vdev), ret);
return ret;
}vdev->fops对应
vivi_fops.mmap 也就是vivi_mmap
static int vivi_mmap(struct file *file, struct vm_area_struct *vma)
{
struct vivi_dev *dev = video_drvdata(file);
int ret;
ret = vb2_mmap(&dev->vb_vidq, vma);
return ret;
}vb2_mmap
-> __find_plane_by_offsetstatic int __find_plane_by_offset(struct vb2_queue *q, unsigned long off,
unsigned int *_buffer, unsigned int *_plane)
{
struct vb2_buffer *vb;
unsigned int buffer, plane;
/*
* Go over all buffers and their planes, comparing the given offset
* with an offset assigned to each plane. If a match is found,
* return its buffer and plane numbers.
*/
for (buffer = 0; buffer < q->num_buffers; ++buffer) {
vb = q->bufs[buffer];
for (plane = 0; plane < vb->num_planes; ++plane) {
if (vb->planes[plane].m.offset == off) {
*_buffer = buffer;
*_plane = plane;
return 0;
}
}
}
return -EINVAL;
}其实很明显的可以看出来,就是通过offset找到对应的buffer及plane的值.
四.缓存放入队列VIDIOC_QBUF
将所有的缓存放入队列
struct v4l2_buffer v4l2_buffer;
for(i = 0; i < nr_bufs; i++)
{
memset(&v4l2_buffer, 0, sizeof(struct v4l2_buffer));
v4l2_buffer.index = i; //想要放入队列的缓存
v4l2_buffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buffer.memory = V4L2_MEMORY_MMAP;
ret = ioctl(fd, VIDIOC_QBUF, &v4l2_buffer);
...
}
















 641
641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











