







1.BASE导入
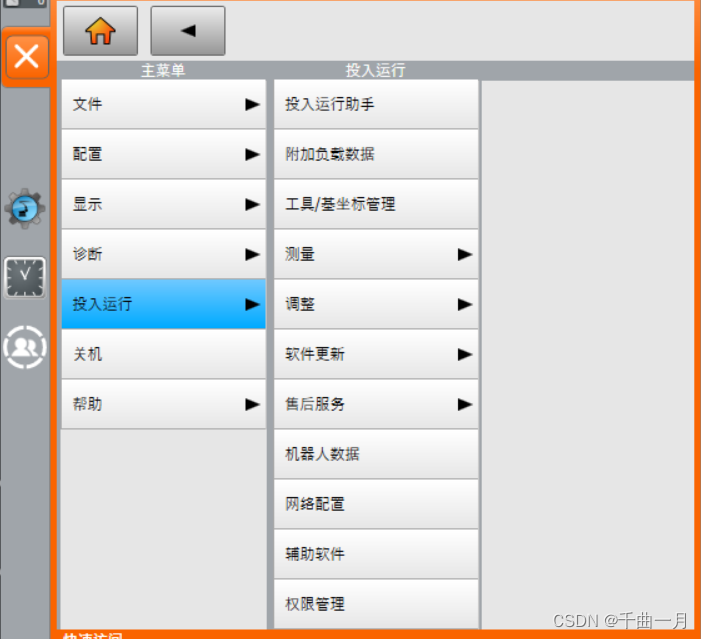
菜单>投入运行>工具/基座标管理>输入仿真BASE数据
2.TCP(Tool Central Point)导入
路径同上述BASE点导入,另有仿真数据若和现场不一致的情况,或无仿真数据时,需自己制作TCP及工具坐标系,此方法后续再详细介绍。
3.程序模板导入
程序模板的导入,需要将U盘原本存在的program程序、cell程序、prograss程序、service程序等复制到R1文件夹下,后续相关程序即可正常调用运行。
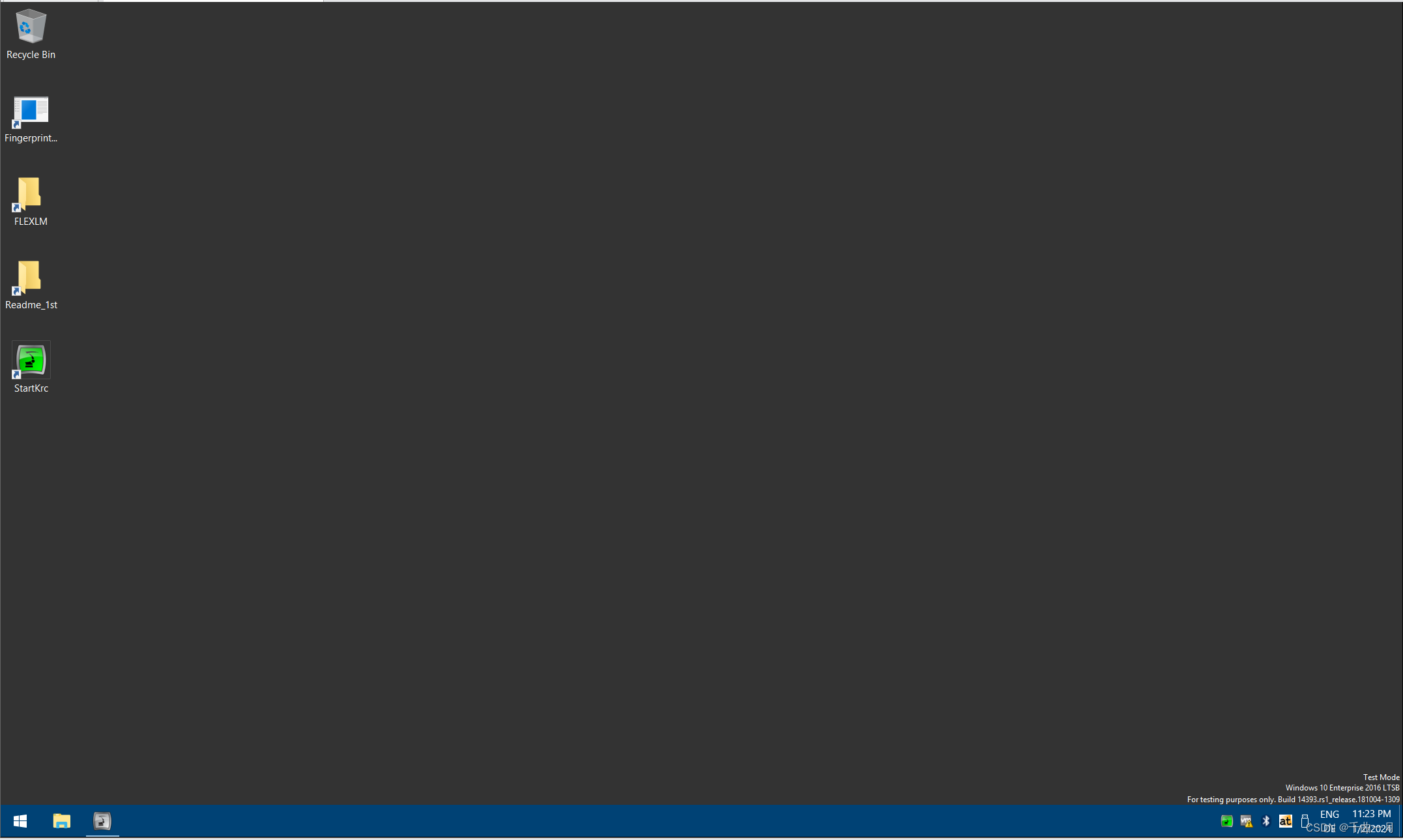
最简单的复制方法为将机器人界面退回至HMI界面,界面将会退至Windows界面(KUKA机器人系统为Windows系统,后续打开C盘即可将相关程序复制到R1界面下。
主菜单>投入运行>售后服务>HMI最小化


















 8297
8297

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









