







前言
最近在复习线代,李永乐的基础课我刷了一下,感觉讲的不够透彻,和我当年学线代的感觉一样,就是不够形象。
比如,行列式为什么那么重要,它的含义究竟是什么?特征值到底代表了什么?等等。说白了,我需要几何直观的理解。
几何直观解决的问题是,我为什么要用这个,有什么用,而数值计算只是让我们能应用罢了,可惜我们只是学了数值计算。
于是我开始刷3b1b的《线性代数的本质》
这篇文章是观看视频后我的个人感悟,可以结合视频一起食用,有解释的不清楚的地方,以视频为准,毕竟我理解的还是不够深入
向量
在线性代数中,向量是以原点为起点的箭头,终点坐标和向量的值是一样的。
因此,向量之间的空间上的运算也可以变成向量值的运算,比如向量和(移动),向量数乘(缩放)。
之所以能够用向量对应向量值,是因为有一个i和j的基底。说白了,就是坐标系。如果基底变了,要保持向量不变的话,向量值就要改变。
总之,用数值(向量值)描述向量,要依赖于基底。
如果两个基底不共线(线性无关),则可以张成一个面,否则只能是一条线
如果是三个线性无关的向量,则可以张成一个三维空间,如果是n个线性无关的向量,则可以张成n维空间,但是这个就是无法想象的了。
如何理解线性相关呢?所谓线性相关,就是说某一个向量落在了其他向量张成的空间内,不需要这个向量了,可以移除这个向量而不影响向量组张成的空间。
假设给定3个向量的向量组,假设两个向量共线,那么必然线性相关(充分条件),但是如果三个向量都不共线,就能说明线性无关了吗?不能。
下面4条等价:
- 线性相关
- 有一个向量落在其他两个向量张成的平面内
- 该向量可以被其他向量线性表出
- 存在不全为0的k,使得
k 1 α 1 + ⋯ + k n α n = 0 k_1\alpha_1+\cdots+k_n\alpha_n=0 k1α1+⋯+knαn=0
前面的都好理解,第4条可以这么理解,基于3,可以得到第i个向量=其他向量的线性组合,那么令 k i = − 1 k_i=-1 ki=−1,不就是一组不全为0的系数,让这个向量组的计算结果=0吗?
矩阵
矩阵有两种含义
- 向量组
- 对向量的线性变换
给定一个向量,乘一个矩阵,就可以变成新向量,这就是矩阵的几何意义。
当一个矩阵里面的所有向量被同时变换,那就是矩阵的线性变换。
但是无论是向量,还是矩阵,其变换都是通过乘以矩阵实现的。
实际上任何函数都可以变换空间,只是线性变换后,曾经的直线还是直线,原点也没有变化。本质在于,线性变换是均匀的,保持网格线平行且等距均匀分布的变换。
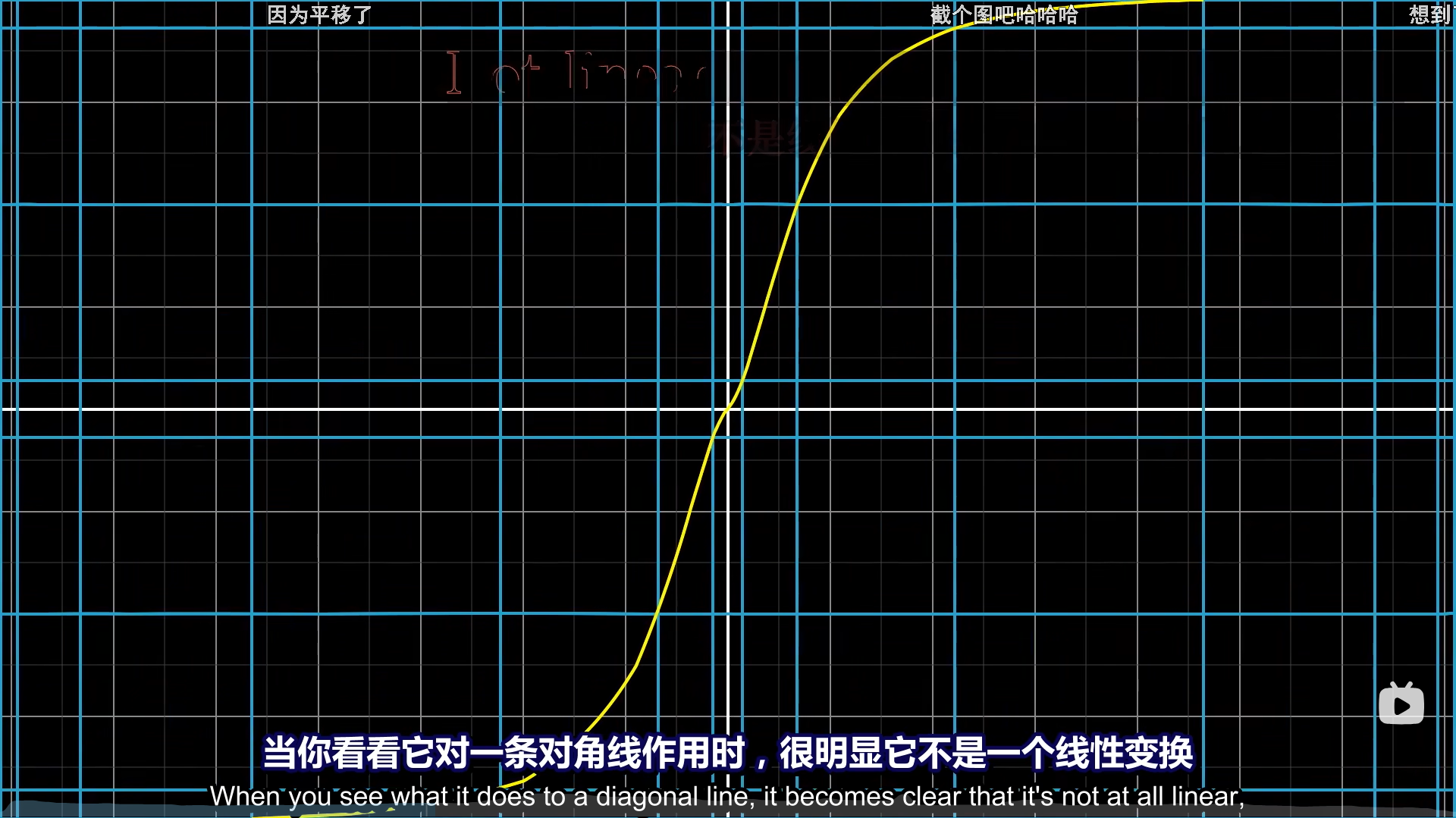
用另一个说法去说,就是基底是线性变换的,而曾经的所有向量与基底的关系保持不变,变的,只是向量本身的值,而不是向量和基底的关系。
所以考虑线性变换,我们其实只需要记住两个事情:
- 原始向量和原始基底的关系,这个关系会保持不变
- 基底的情况,这会随着线性变换而变
这两点注意好,无论你怎么变基底,都可以迅速推断出新向量的位置
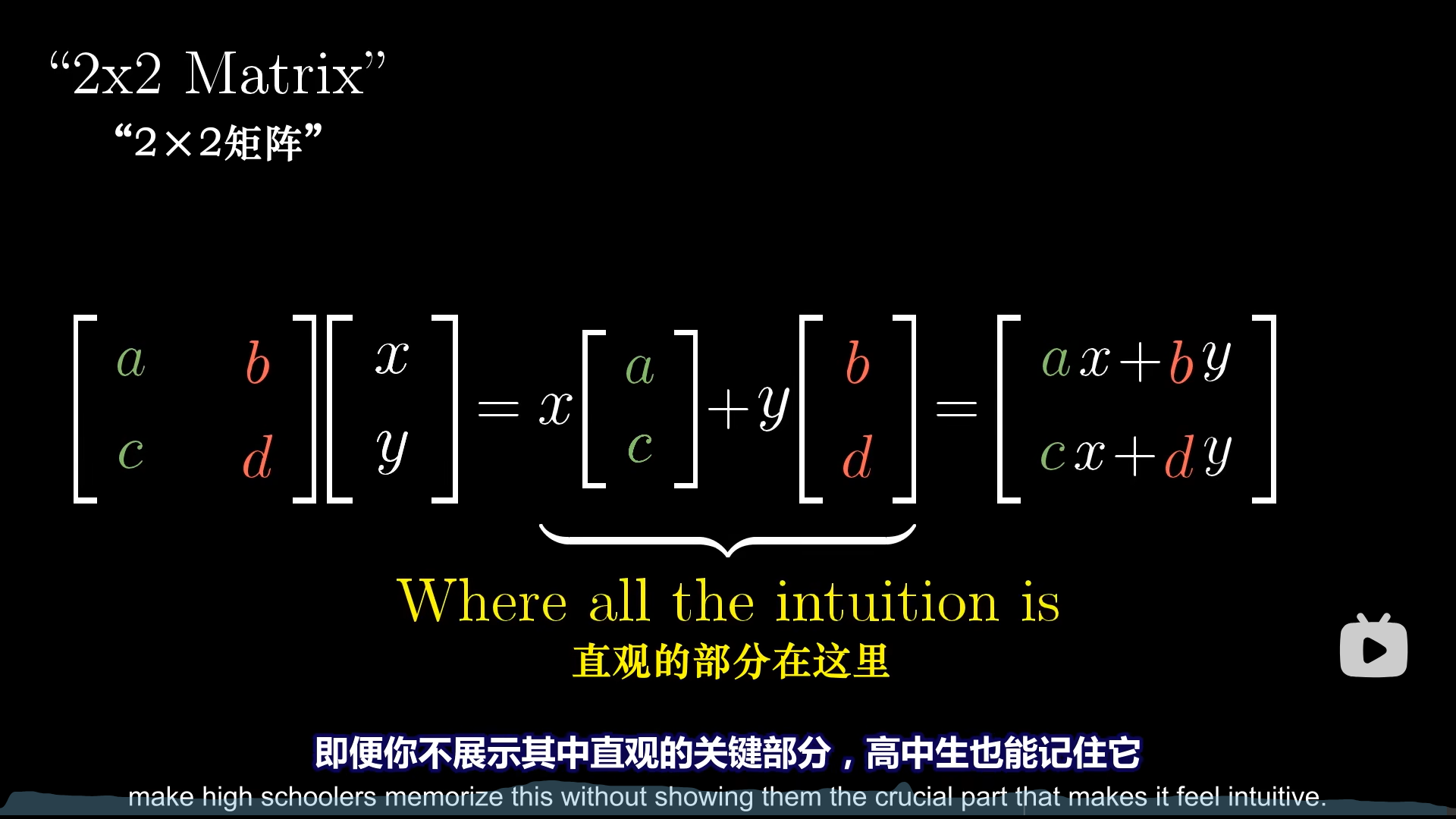
实际上,对于二维来说,一个向量本身就是 ( i ^ , j ^ ) [ k 1 k 2 ] = k 1 i ^ + k 2 j ^ (\hat{i},\hat{j}) \begin{bmatrix} k_1\\k_2\end{bmatrix}=k_1\hat{i}+k_2\hat{j} (i^,j^)[k1k2]=k1i^+k2j^
而 ( i ^ , j ^ ) (\hat{i},\hat{j}) (i^,j^)本身就是一个矩阵, [ 1 0 0 1 ] \begin{bmatrix} 1\ 0\\ 0\ 1 \end{bmatrix} [1 00 1]
可以直观地理解:
- 左边的矩阵,从左到右是n个基底
- 右边的向量代表向量和基底的关系,就是线性标出的系数
- 新的向量就是新的基底的线性组合,最后算出来的值,就是新的基底下,向量的值。
- 新向量按照维度理解,则每一个维度,都是基底按照系数线性组合的结果
进一步总结:任何一个向量都等于基底乘以系数向量,包括最开始的i,j基底。
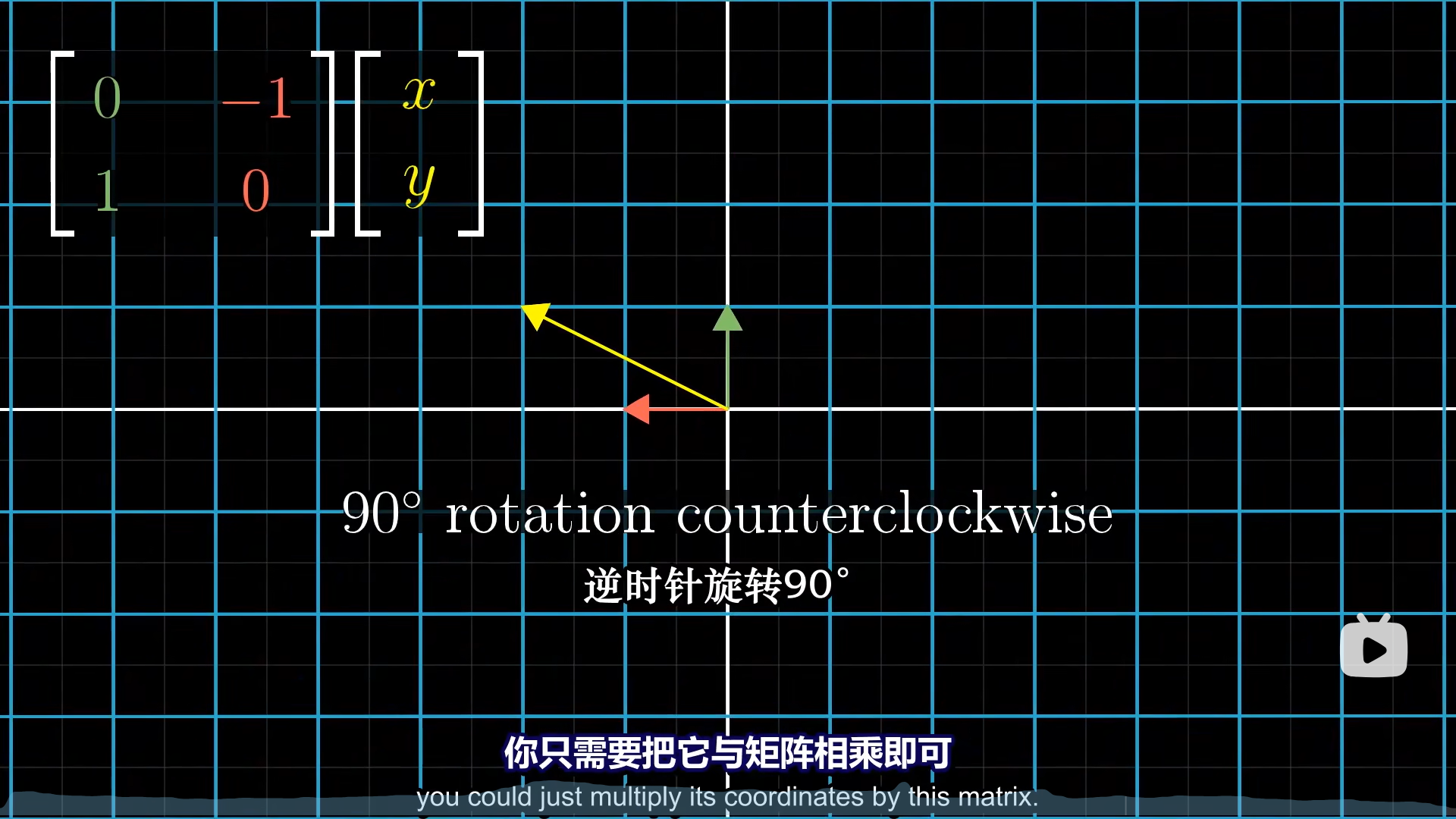
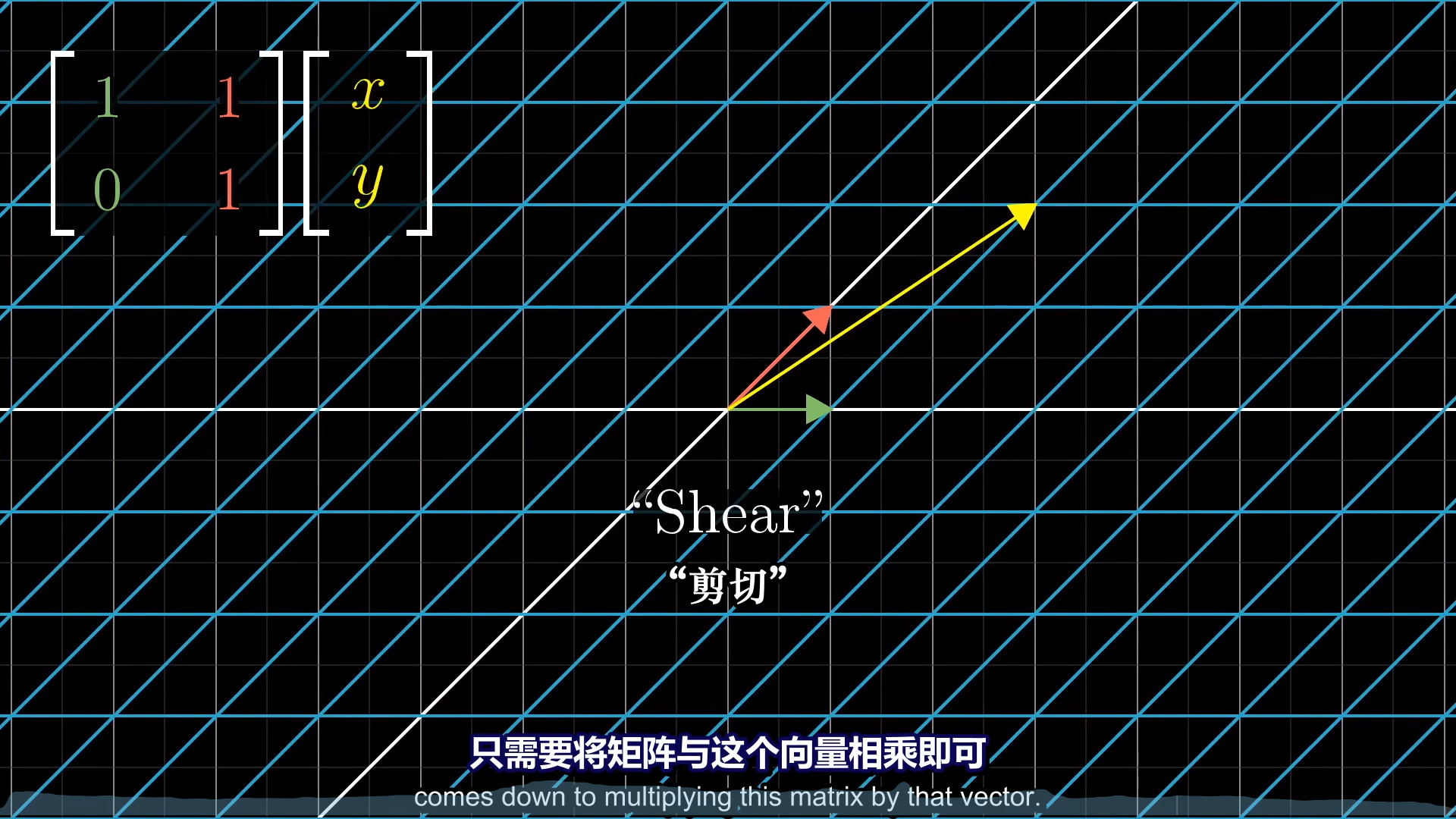
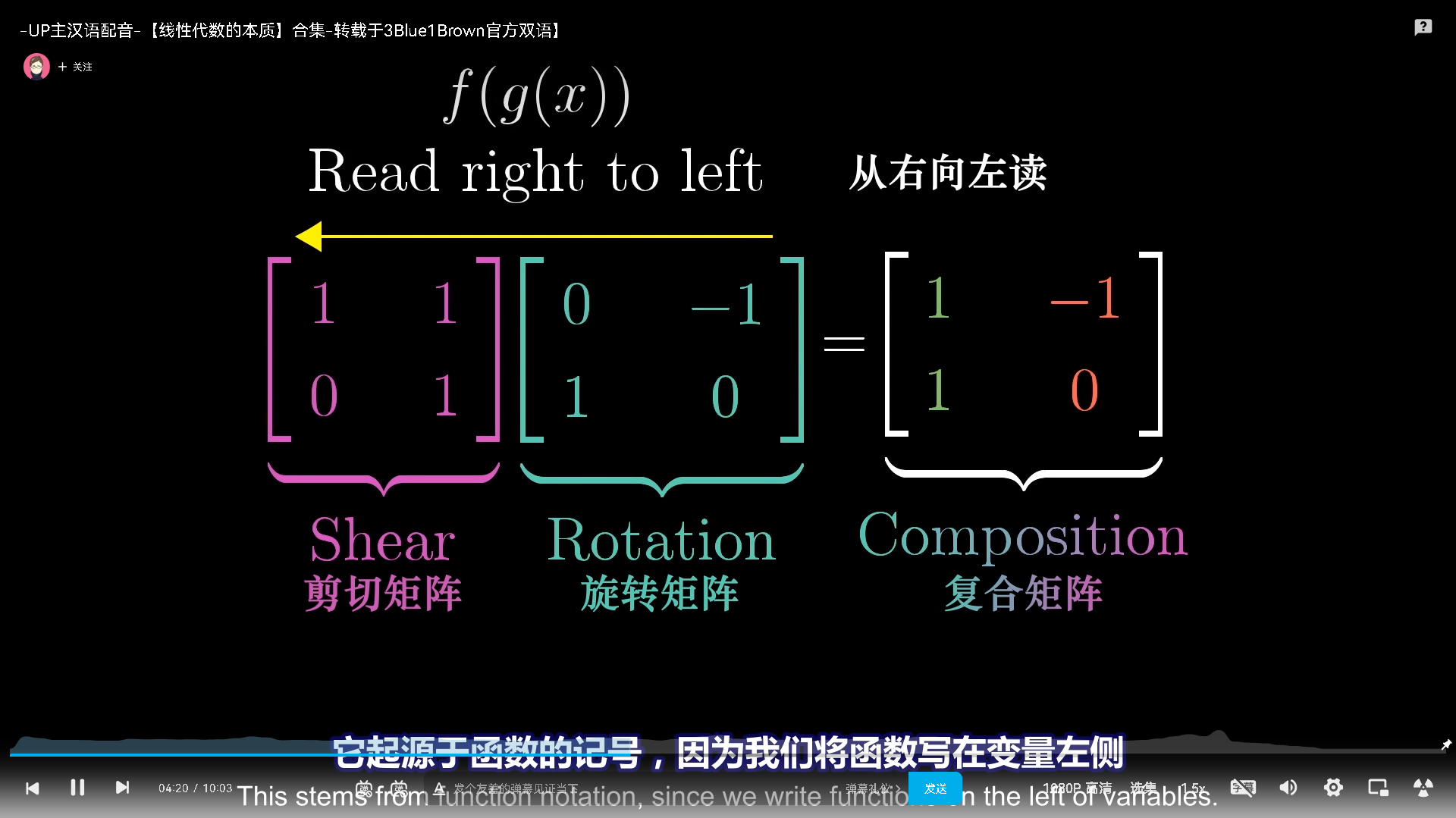
通过这个思路,就可以理解,旋转和剪切是如何实现的了。
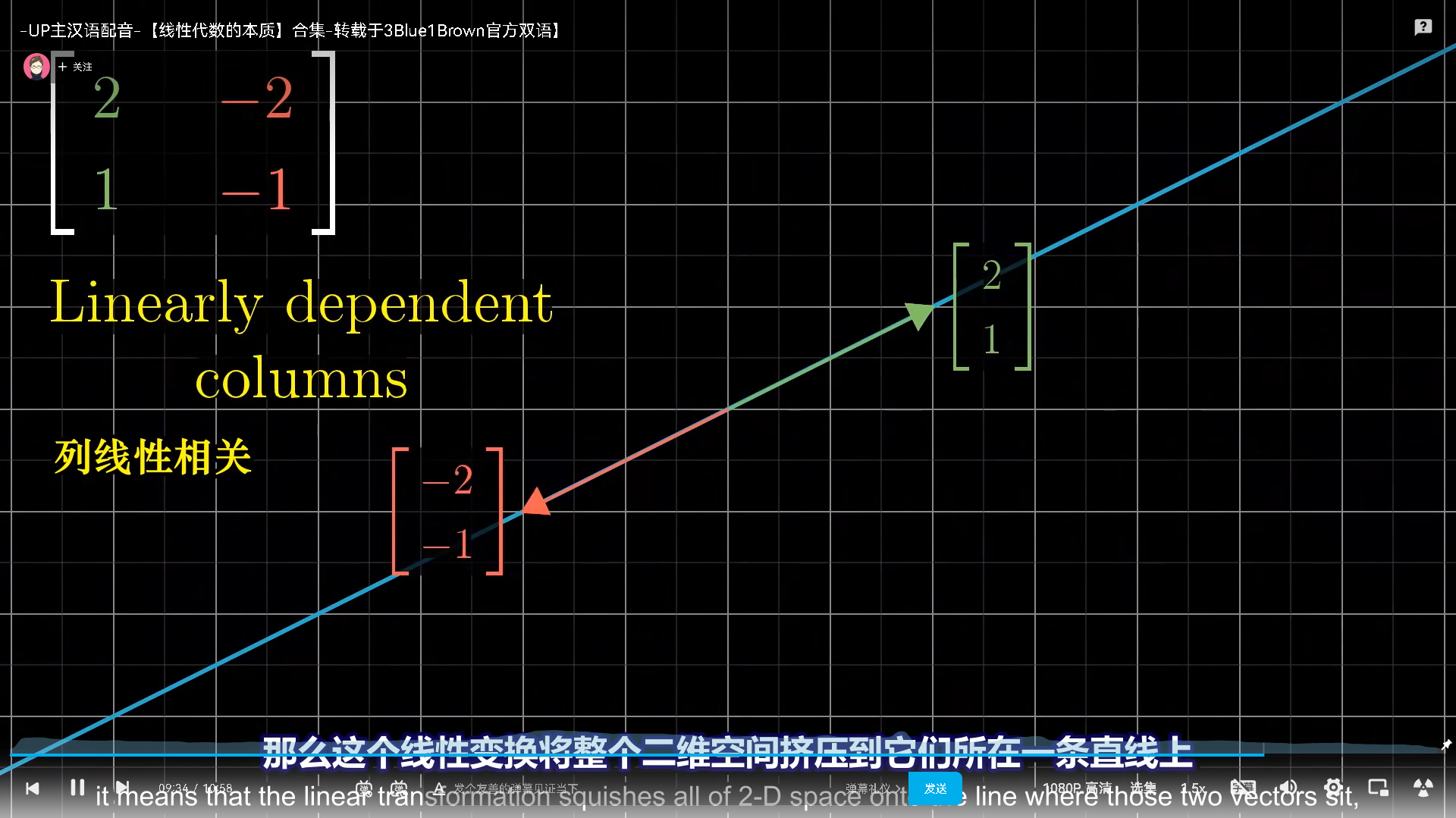
如果新的基底在一条直线上,那么原有的二维空间就会被挤压到一维空间上,这就是降维了。
进一步理解矩阵和矩阵相乘。
如果说一个矩阵描述了新基底,那么另一个矩阵就是把基底再进行一次变换,两次基底的变换可以复合成一次性的线性变换。
所以矩阵乘,有两种理解:
- 把一个空间的每一个向量都变成新的向量,形成新的空间
- 把两个线性变换复合为一个线性变换
按照这个思路去理解,只要不影响从右到左的变换顺序,那么就不影响最终结果,所以矩阵乘具有结合和分配,但是没有交换运算。
行列式
因为是线性变换,所以对于基底向量构成的方格的面积变换,这个比例对于任何方格都是一样的。
即使一个形状不是方格,也可以用方格近似,所以任意面积,在经过线性变换以后,变换的比例是恒定的。
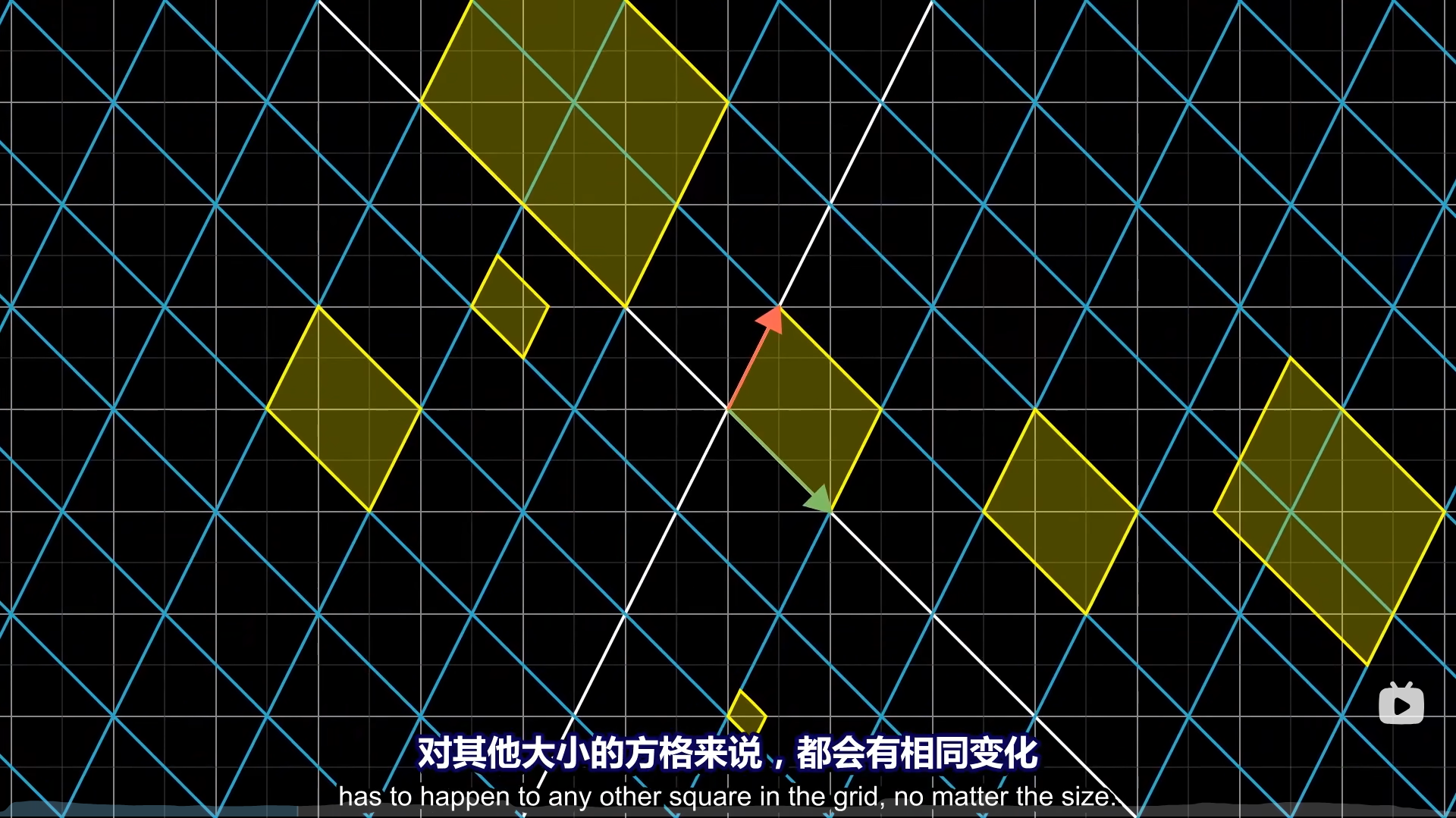
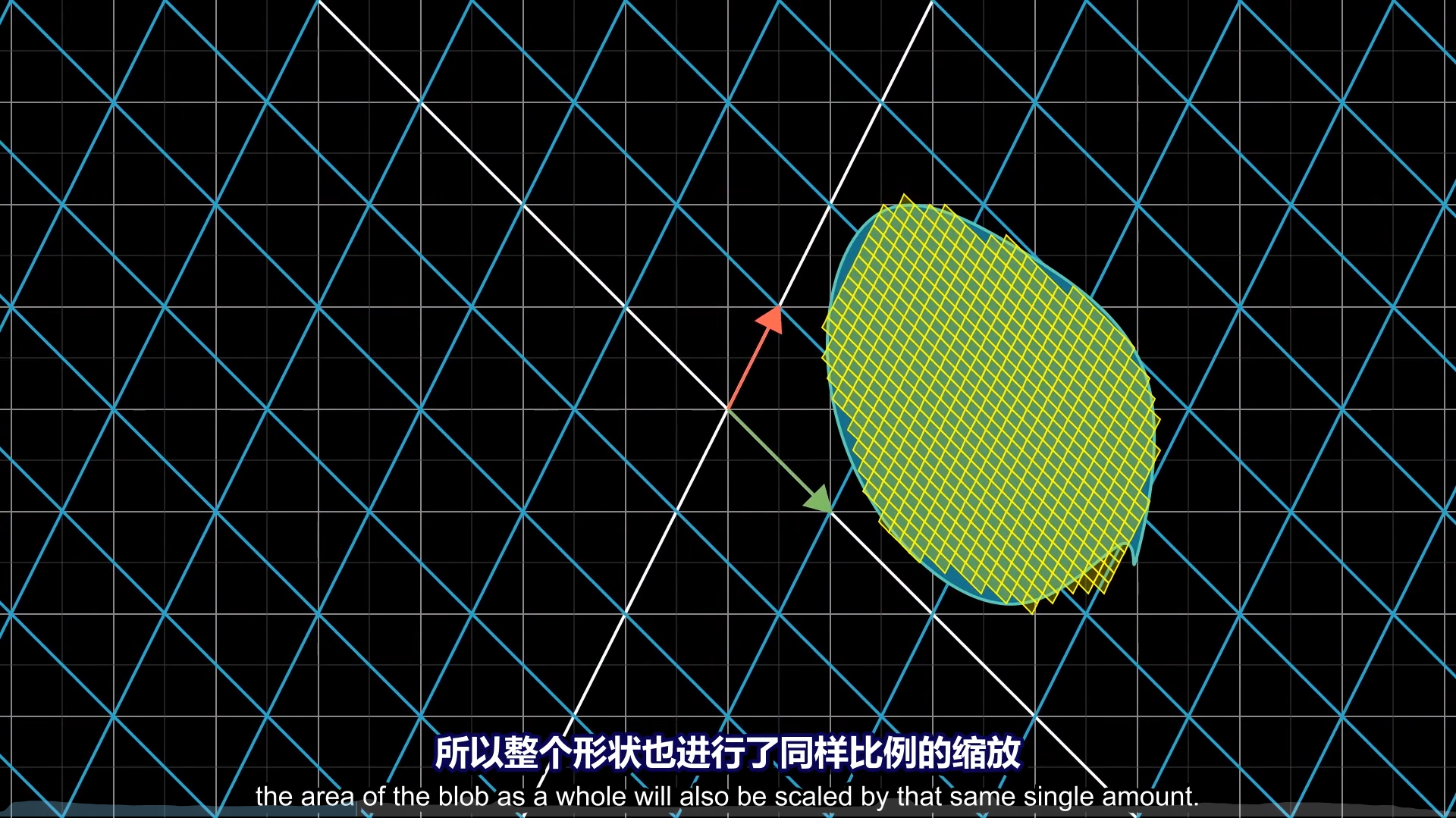
这个面积变换的比例,就是行列式。
为什么存在线性相关向量的矩阵,行列式=0呢?就是因为降维了,导致体积被压缩为0.1
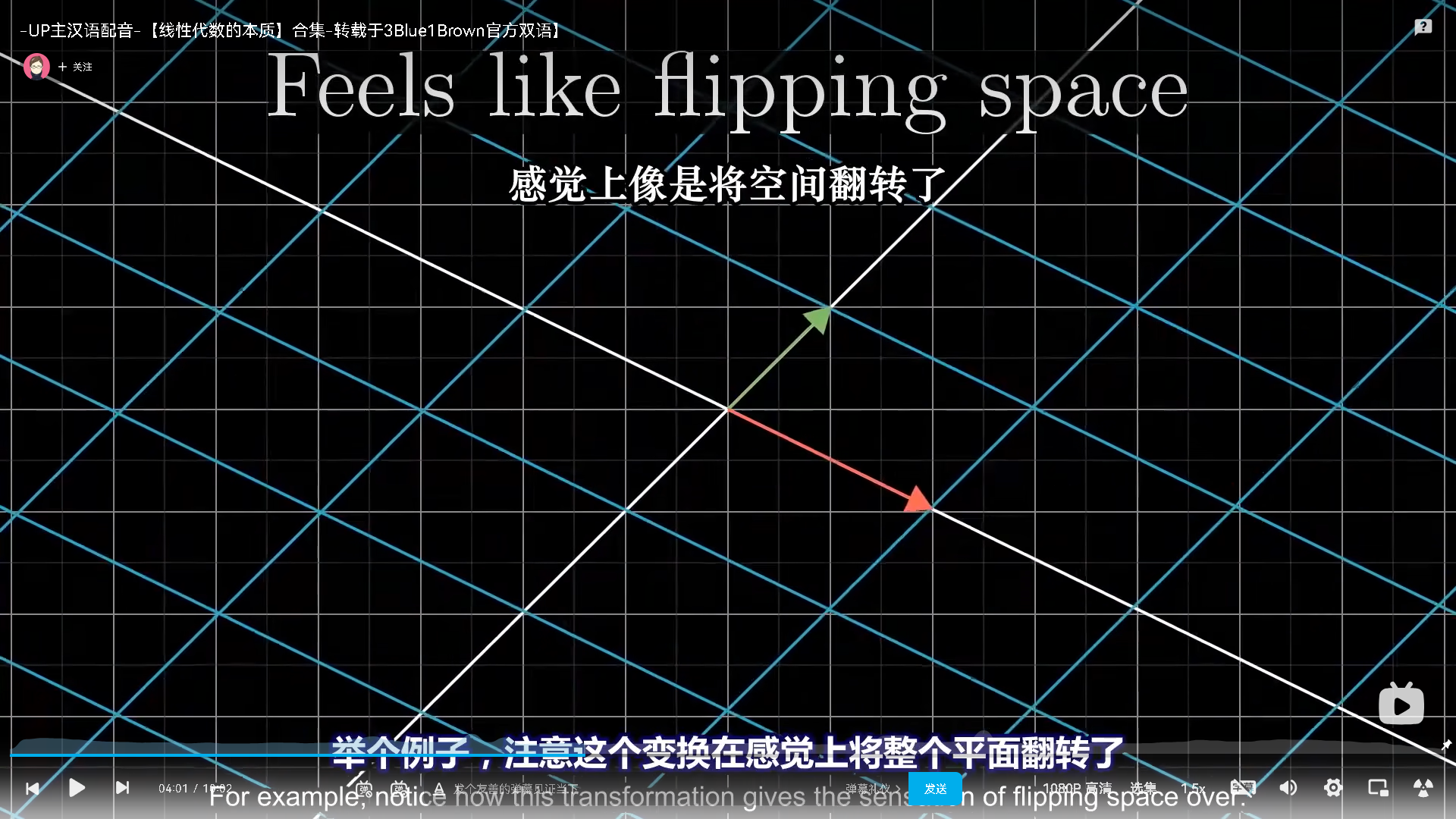
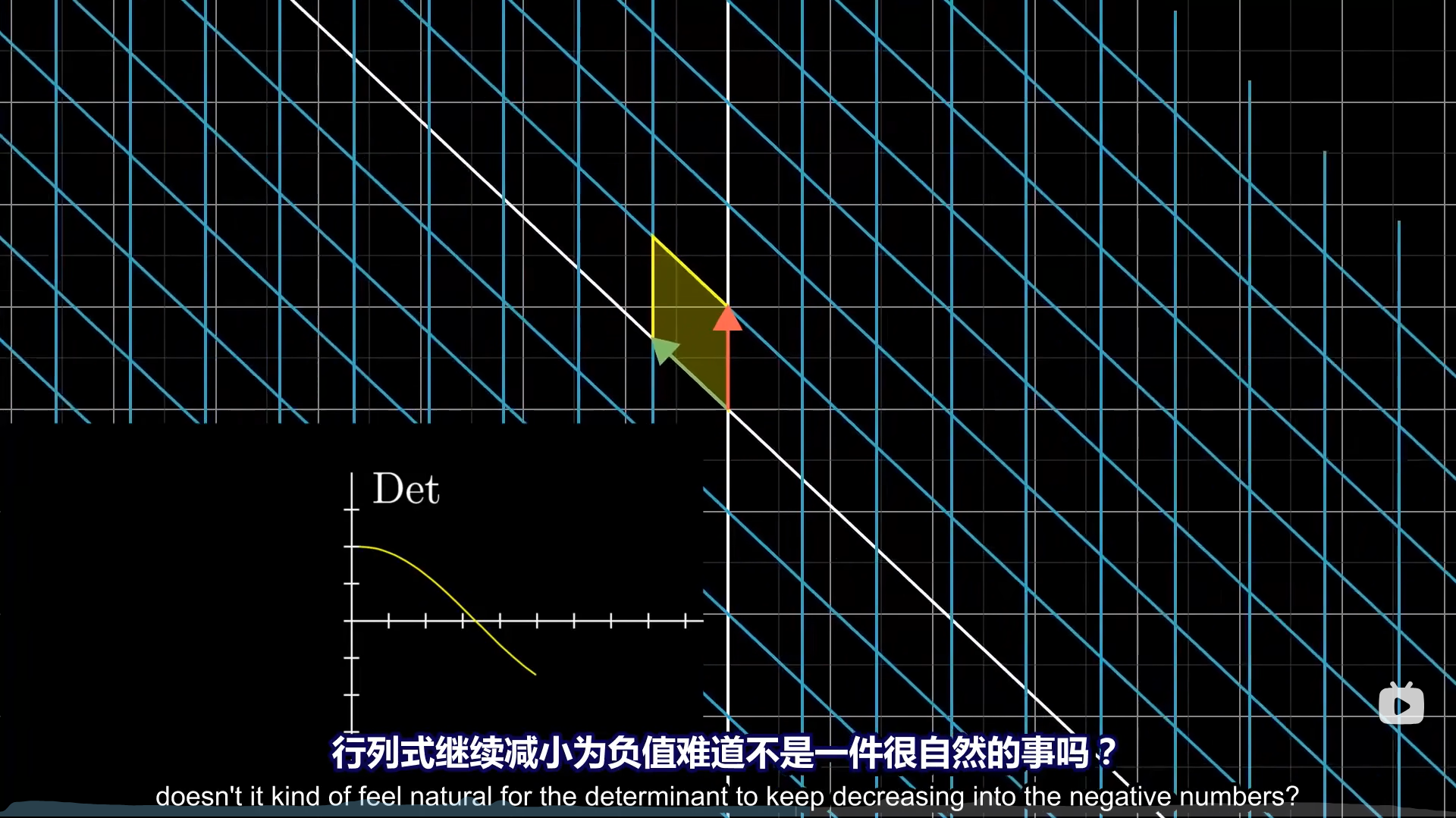
当然,行列式也是有可能出现负值的,那代表什么呢?对于二维空间来说就是翻了个面,学术点就是改变了空间的定向,所谓定向,就是基底的相对位置(比如二维中,正定向是i永远在j左边,三维中,符合右手定则)
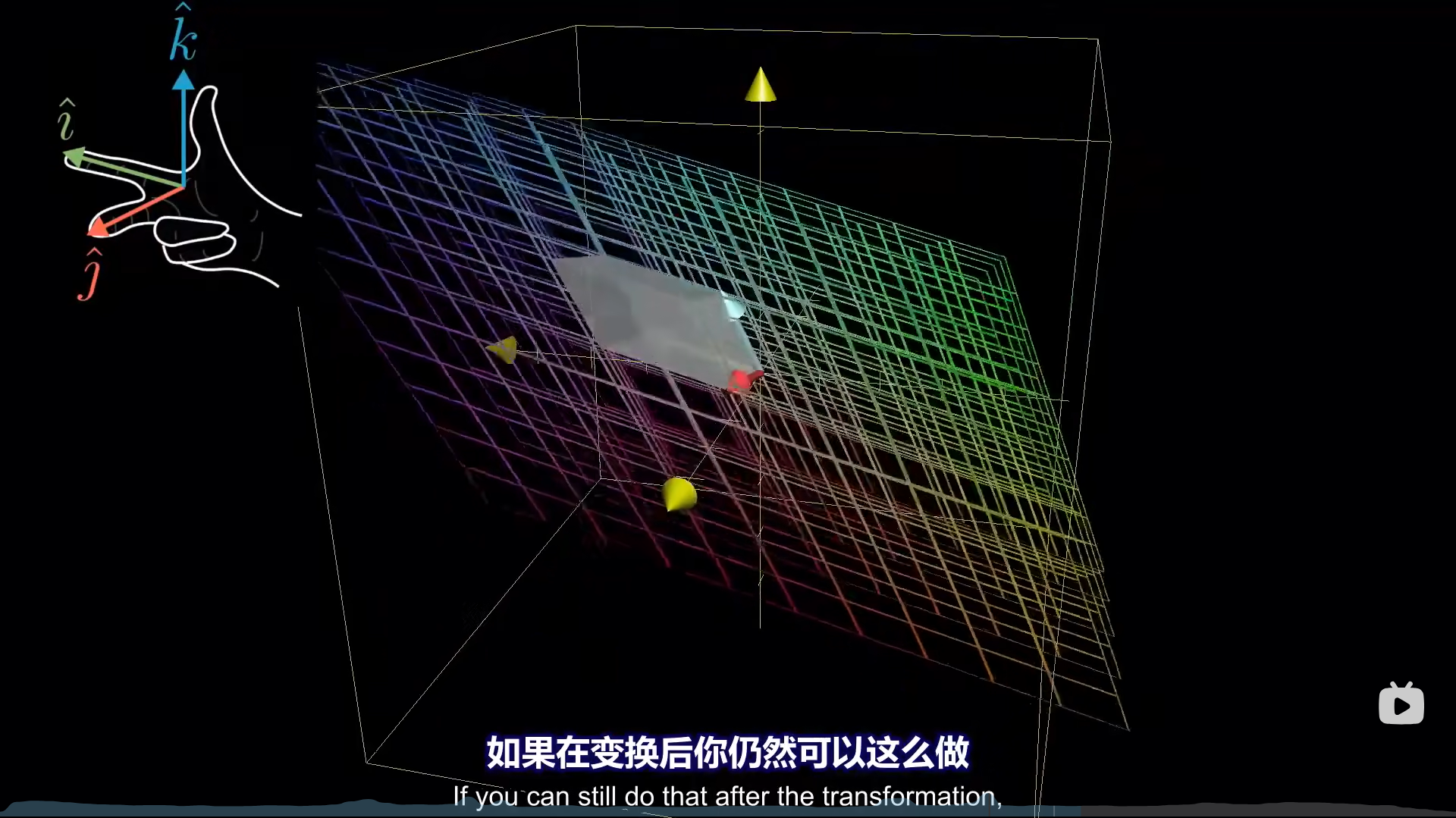
为什么把行列式的两行/两列交换后取值要加负号呢?就是因为交换会改变定向,相当于翻了个面。
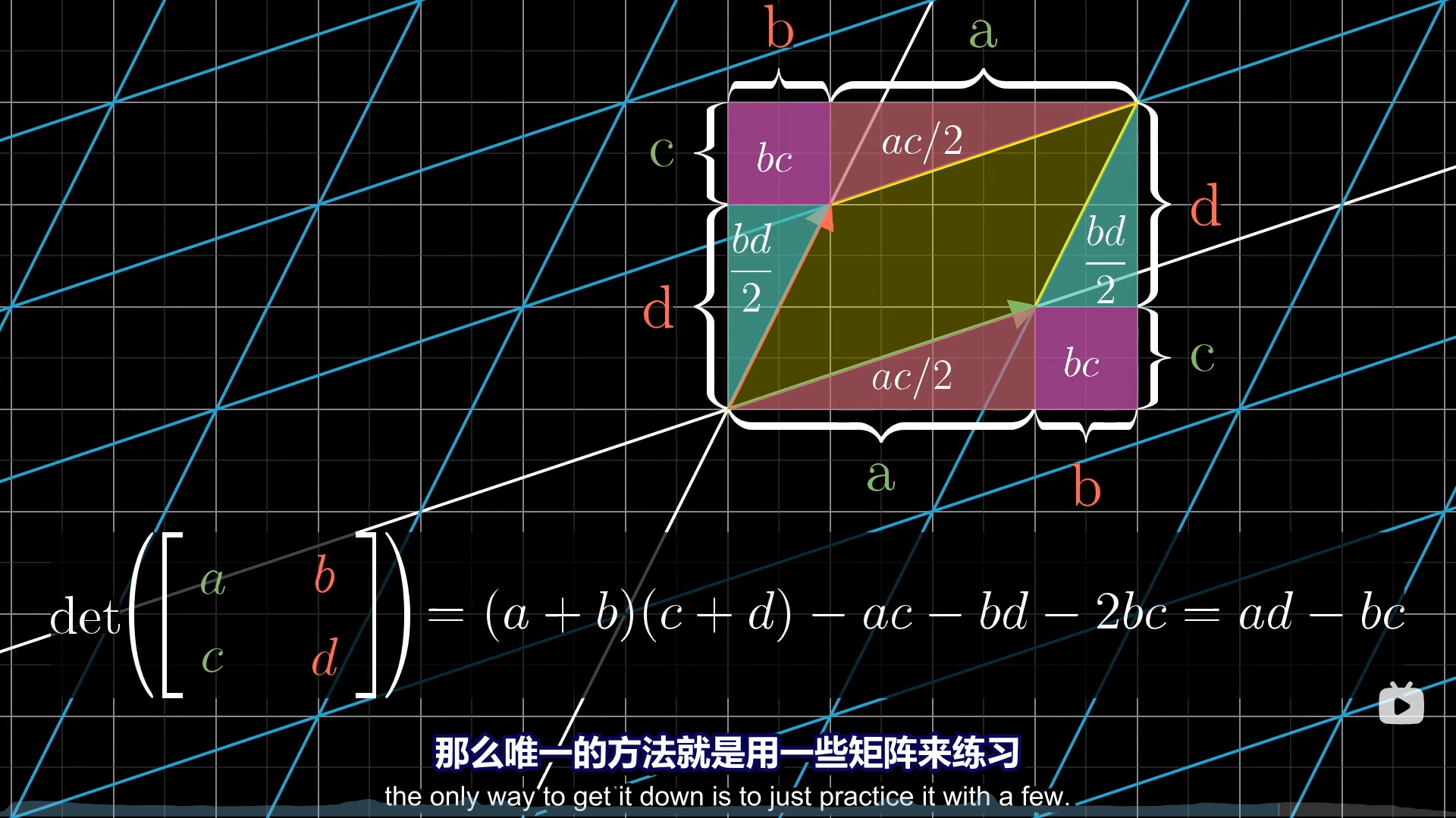
具体要问行列式怎么计算,下图是二维情况。当然,这就是图一乐,实际上你不会这么去算的,就是理解一下,确实是面积的放大比例。
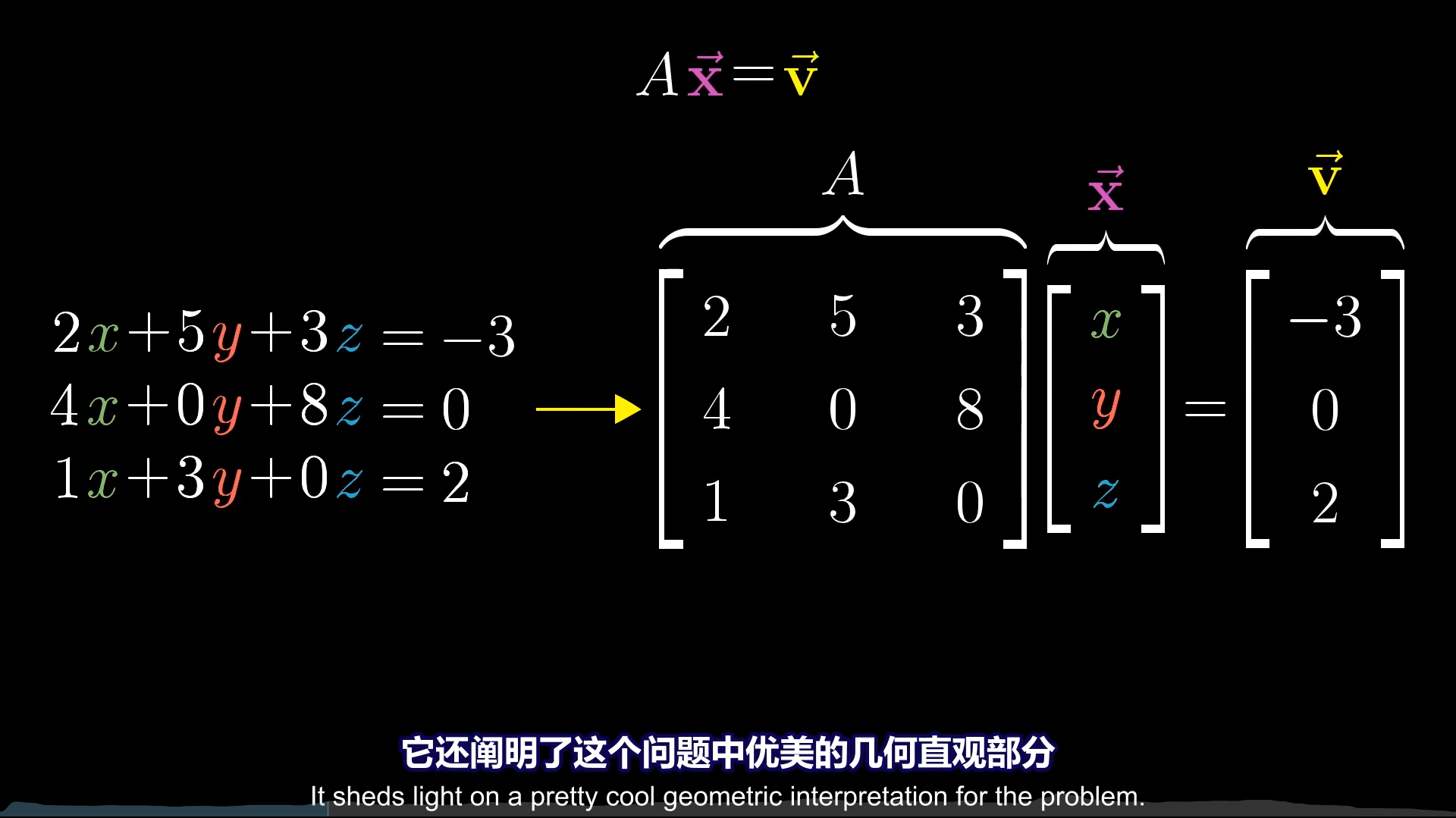
线性方程
我们先讨论非齐次线性方程。
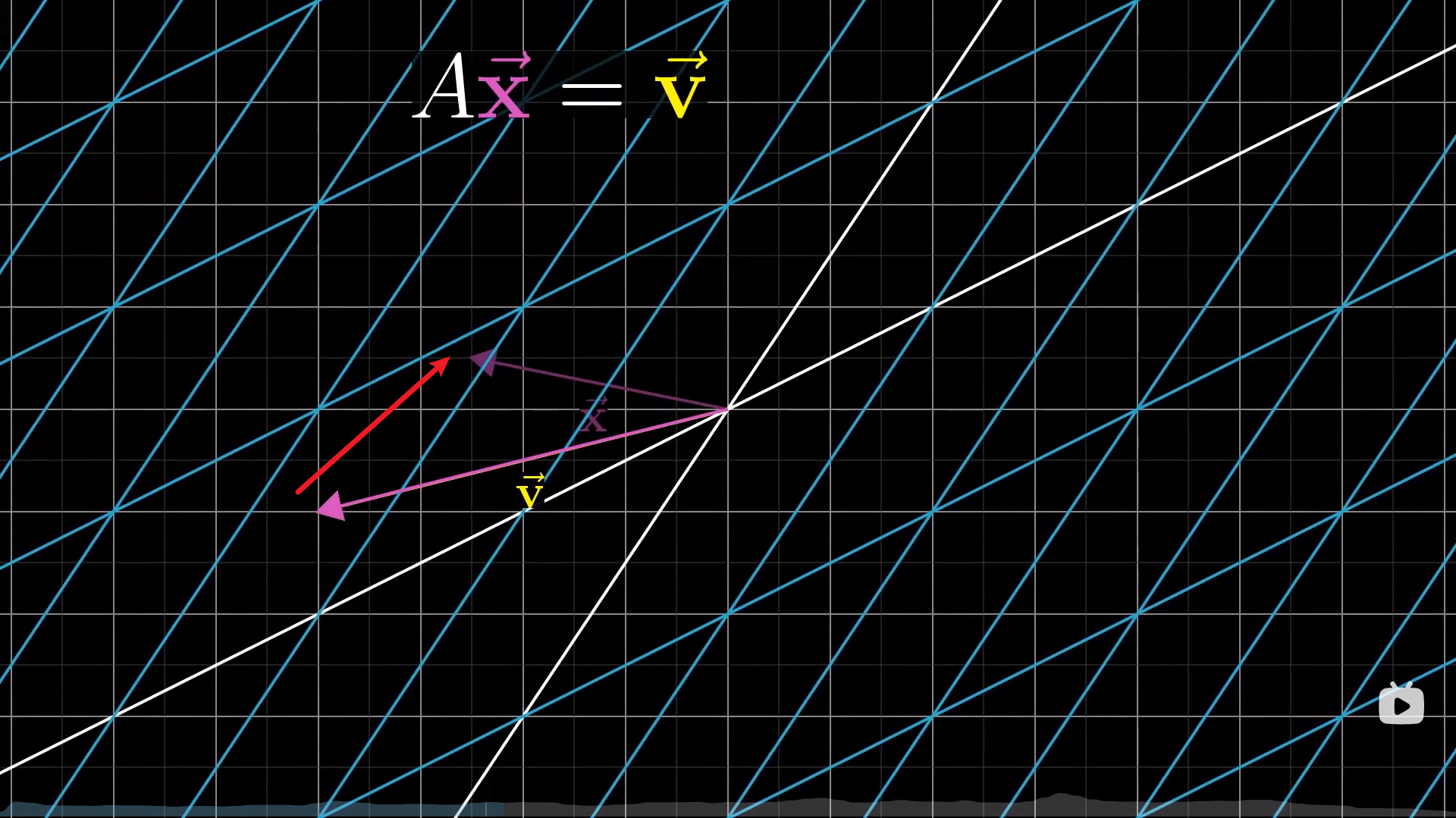
其几何意义在于,寻找一个线性组合x,让这个向量经过基底A变换后,与v对齐
当然,这种情况是复杂的,线性变换后到底降没降维,可以用秩来描述。秩就是A张成的列空间的维度
如果r(A)<n,就代表降维了,自然det(A)=0
如果A的行列式不为0,也就是说A张成的空间可以把v覆盖,那么就有且只有一个x在变换后能和v重合。
这就是唯一解的条件:r(A)=n(或者行列式≠0),代表满秩,r(A,v)=r(A),代表A可以线性表出v。其实后一个条件压根没必要,只要满秩,A的空间维度一定可以覆盖v。
而且,因为是唯一解,具有一一映射的特性,所以可以通过逆映射,即一个逆向线性变换把v倒回x,这就是逆矩阵。
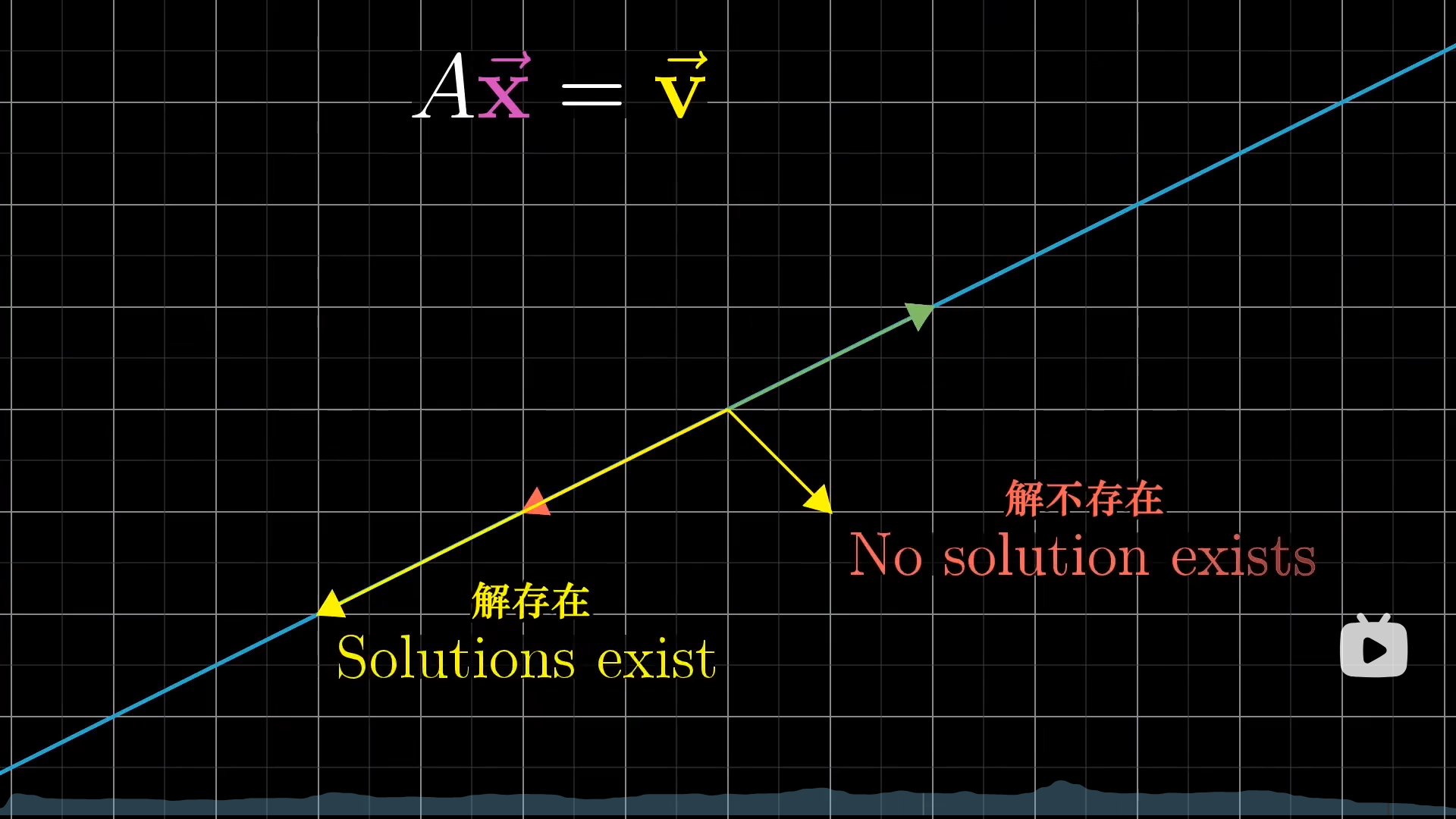
如果行列式=0,即r(A)< n,那么正向变换是降维的,也就是说会把空间压缩,但是你要知道,v是没有被压缩的,还是高维的,那么就有两种可能:
- v恰好落在降维后空间内,即v可以被A线性表出,即r(A)=r(A,b)
- v落在降维后空间外,即r(A)< r(A,b),此刻无解
如果在降维后,还有解的话,那么v这个位置其实是被压缩了无数个向量的
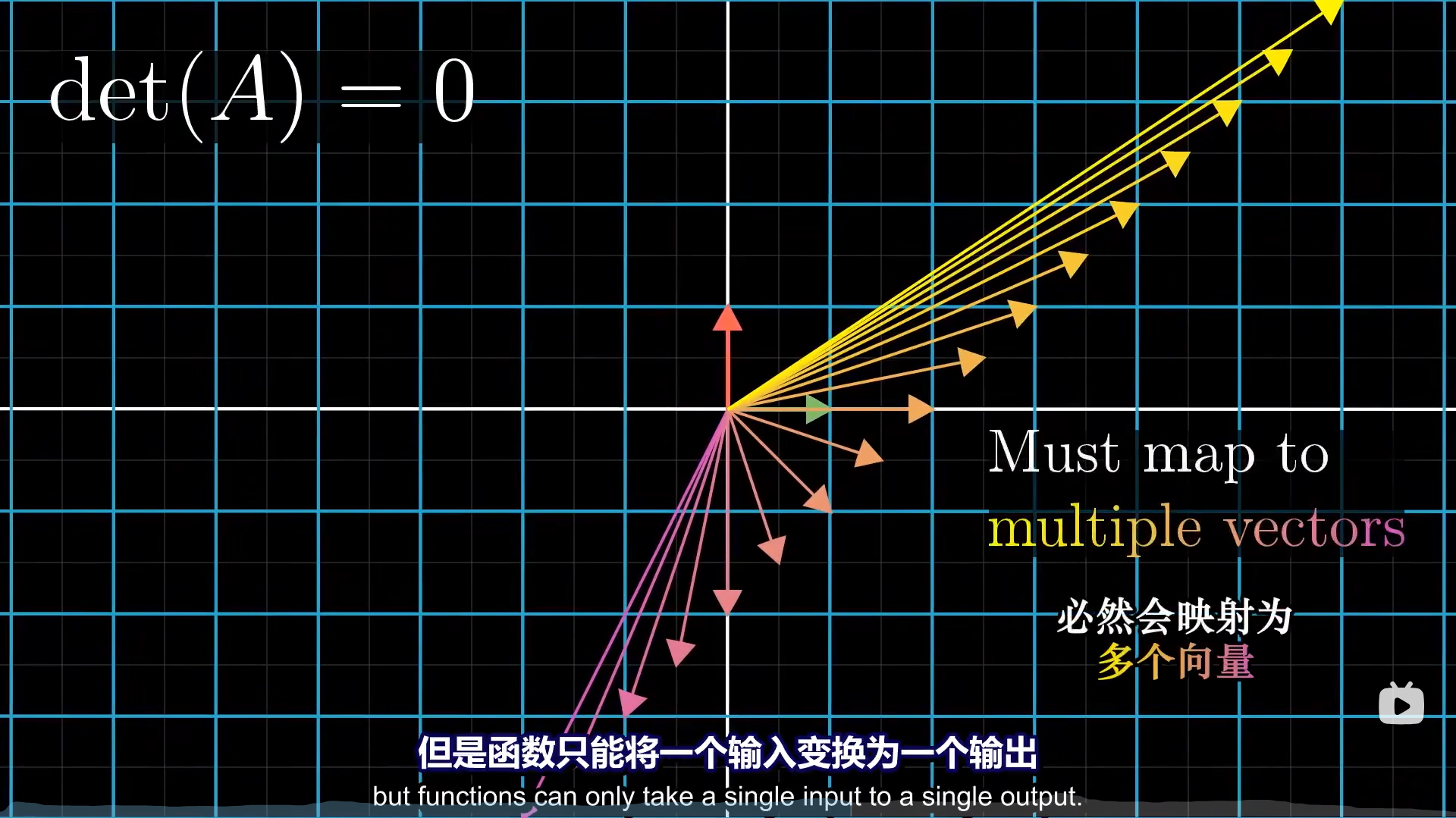
这不是一一映射,你自然无法把一条线逆向变回一个平面,所以det(A)=0时,没有逆矩阵。
从空间角度理解可逆变换的几何意义,就是不降维的变换。
非齐次说完了,说一下齐次吧。
其次就是v=0的特殊情况,0向量,无论被如何压缩,都可以落在空间之中,所以一定有解。
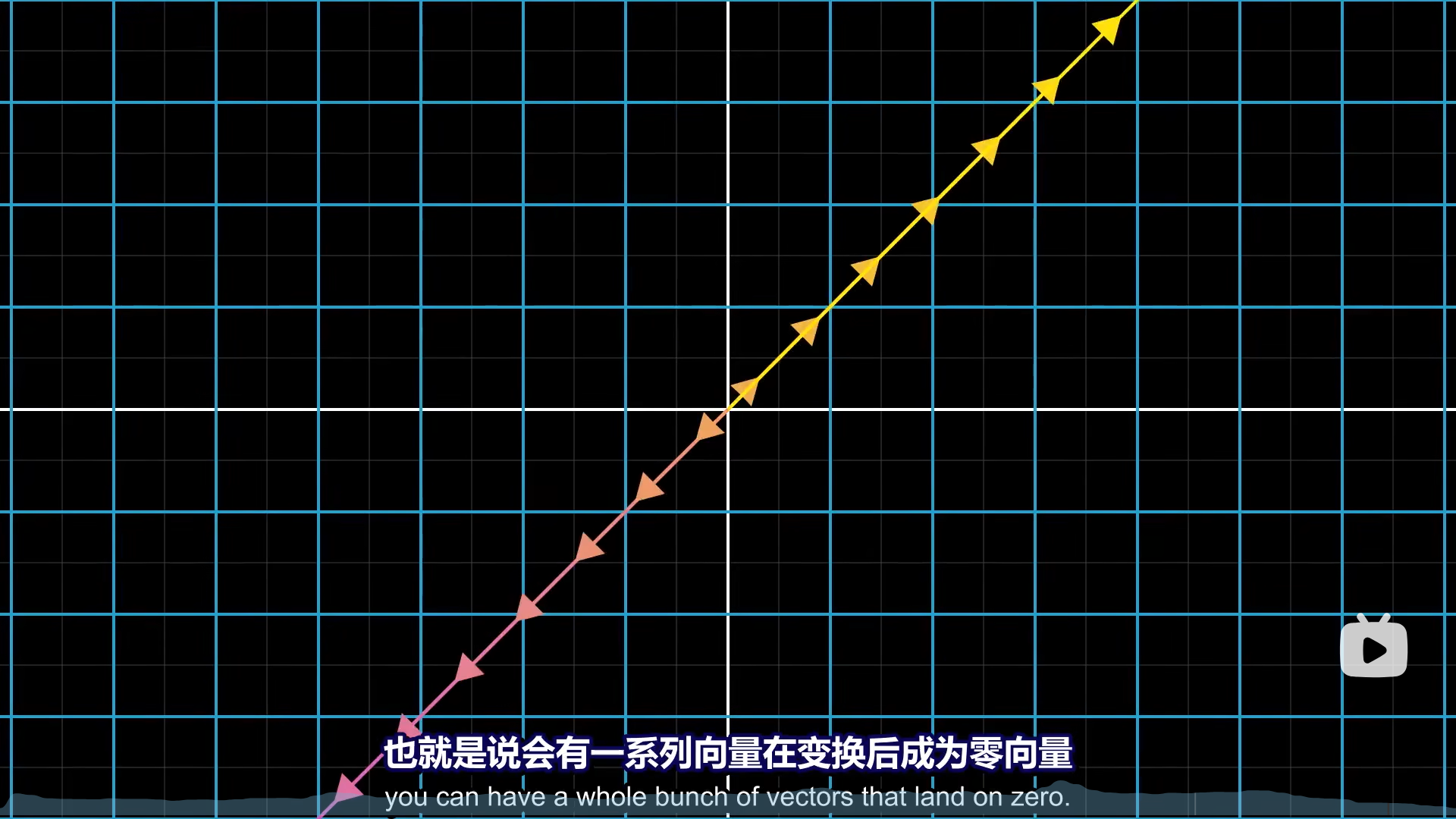
那么有一个解,还是无穷解,就取决于空间是否被压缩了,比如下面这条线被压缩为一个点的时候,无数个非零向量都被压缩为了0向量。
这就是齐次方程无穷非零解的情况,降维必无穷非零。
我们再来思考一下基础解系。你有想过为什么基础解系基底的数量是n-r(A)个吗?
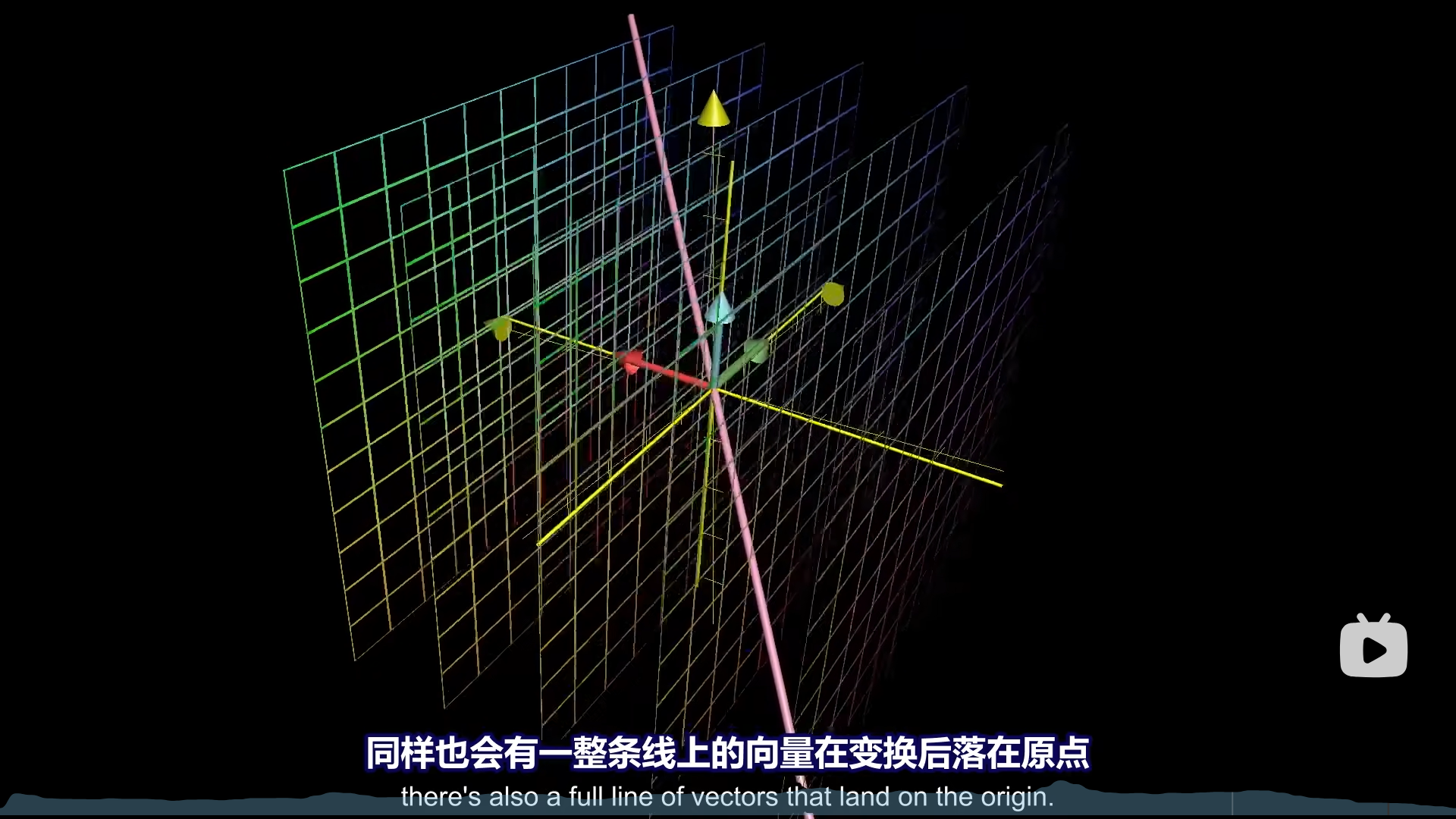
以三维举例,如果只压缩1个维度,那么从空间上来说,就是沿着一条线把一个三维空间压扁。因此,只压缩一个维度,就会有一条线上的所有向量压缩为0向量,此时只需要1个基底就可以表示所有线性变换前的向量(解)
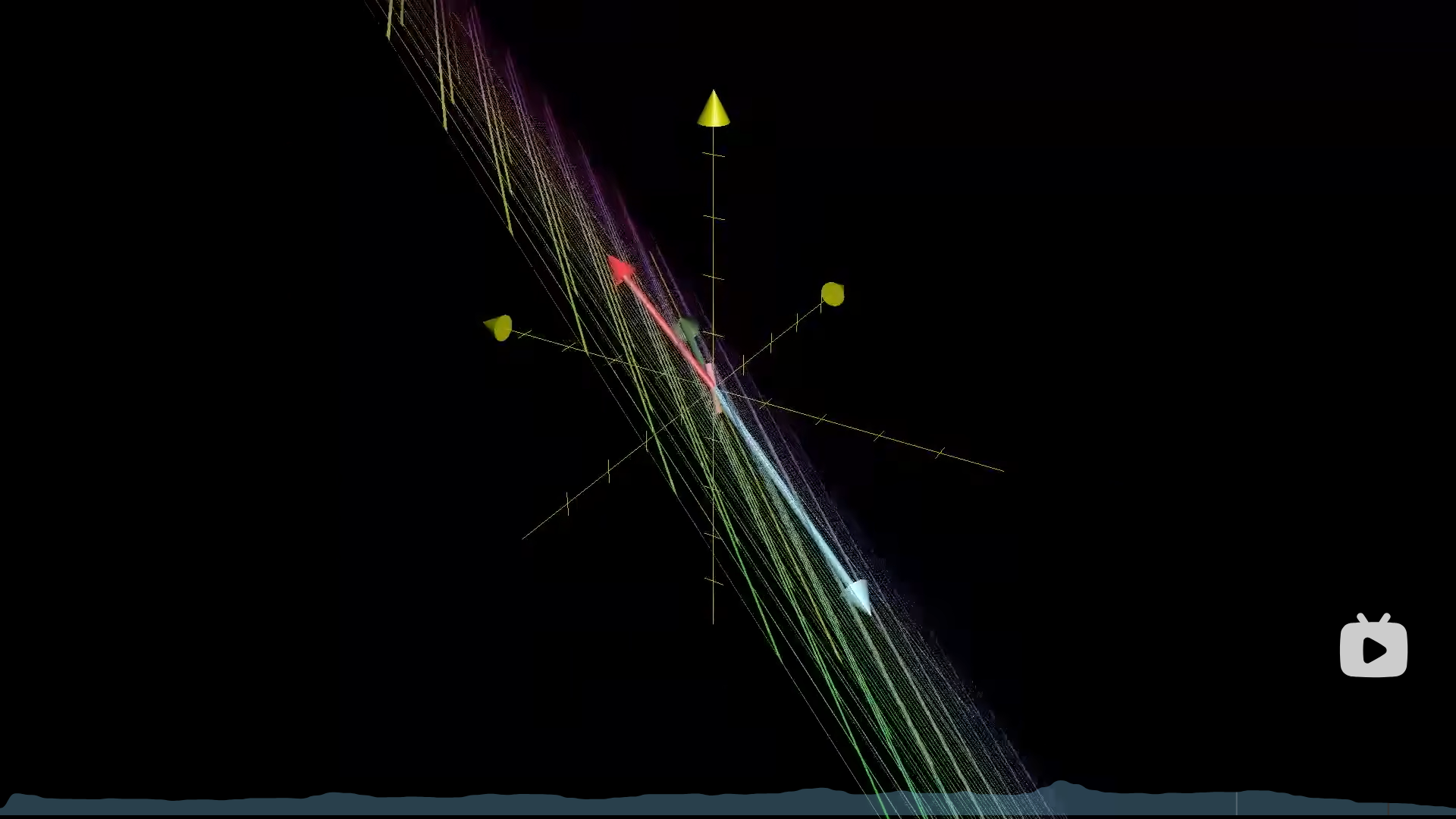
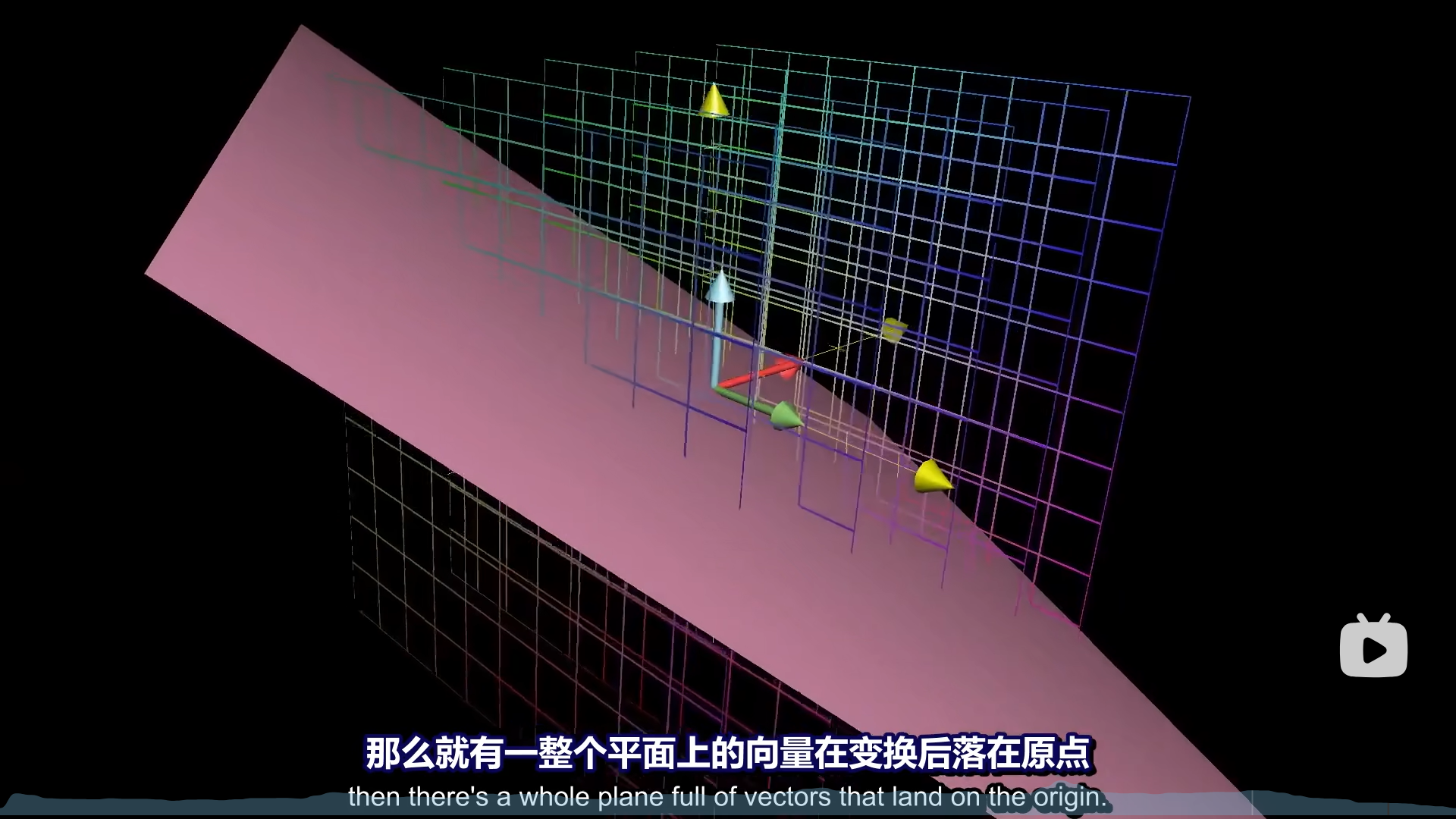
如果压缩2个维度呢?从空间来想象,就是沿着一个面的方向,把三维空间收缩成一束,想象一下你用拇指和食指套成一个圈儿,把很多线捏成一束的过程。
既然是沿着面,那么这整个面上的向量就都会被压缩为0向量,此时就需要用2个基底去表示这一个面上的解向量了。
最后,因为基础解系张成的子空间比较特殊,专门给起了个名字叫矩阵的“零空间”,或者“核”,还是比较形象的,压缩以后只剩一个点了,压缩前那不就是核心嘛。
基础解系就是零空间的基底。
非方阵
方阵代表同一个维度的空间之间的线性变换(不考虑降维情况)
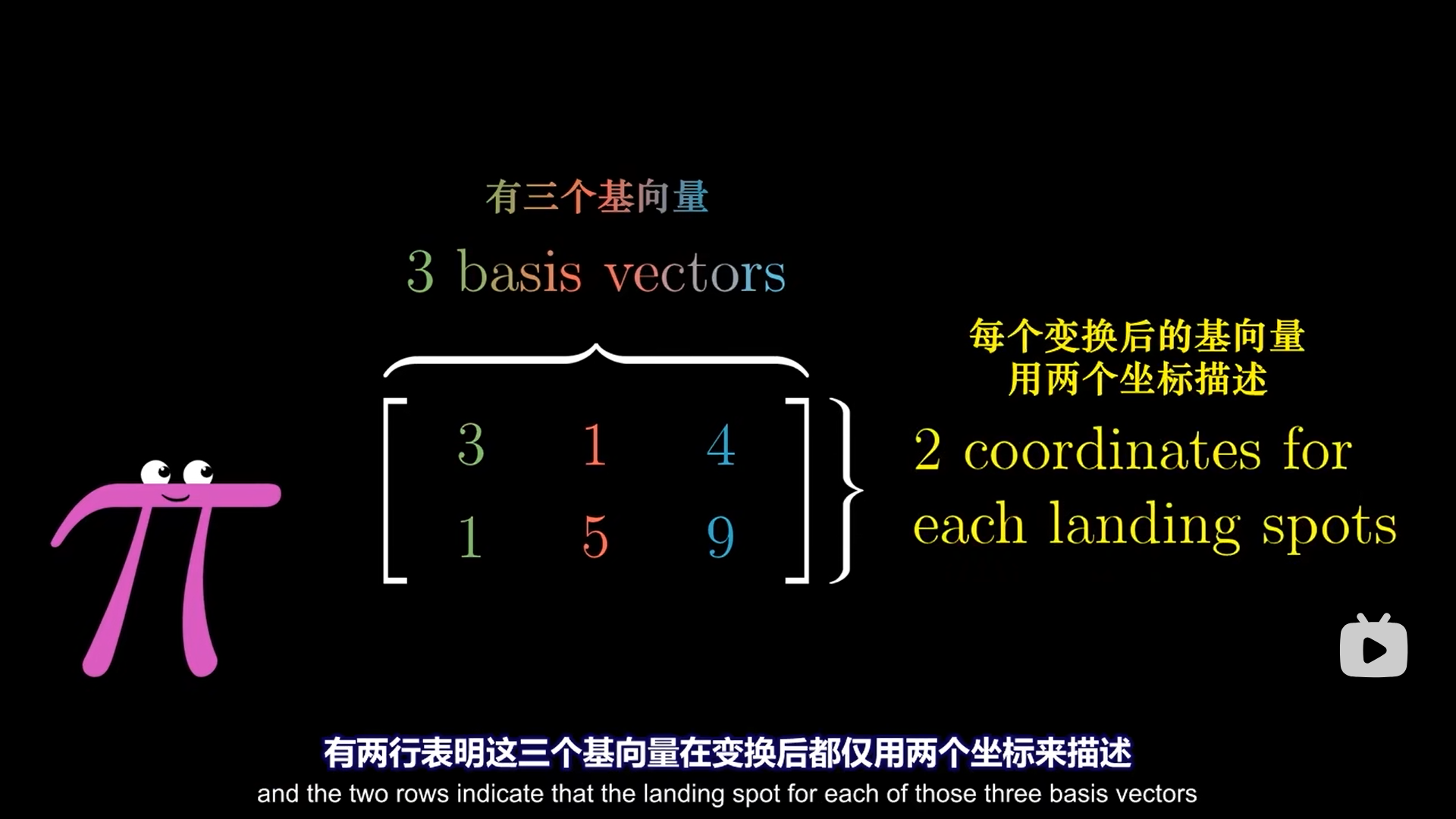
如果是非方阵,就要考虑m和n了。n列代表输入空间是n维的,m代表输出空间是m维的。
什么意思呢?比如在二维空间中,向量在一个平面上,经过了3×2矩阵,变成了3维向量后,向量存在于空间。
然而这并不代表这个升维后的向量,就能脱离原有的平面,非方阵只是把原有平面抬升到更高维的空间,但是平面还是平面,只是倾斜了,正如一张纸上的线,放到空间中,还是一条线。
说白了,m>n的情况下,矩阵只是把原来n个低维基底,转移到了高维的空间中,基底仍然是n个
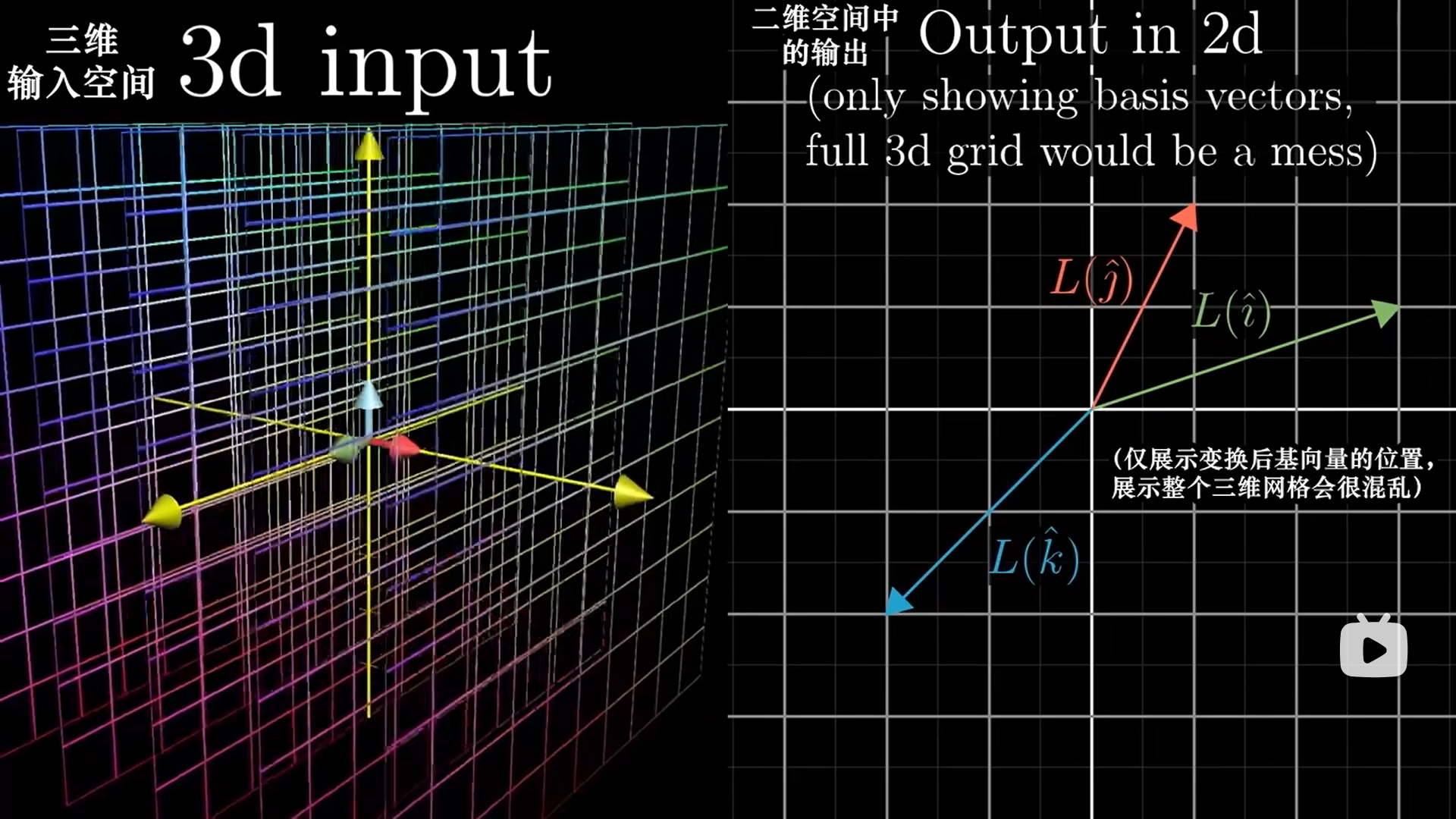
如果是2×3矩阵呢?代表了把3维空间压缩到2维空间,这个变换是很不舒服的,因为把3个基底放到了2维空间,很明显有一个基底就是冗余的了。
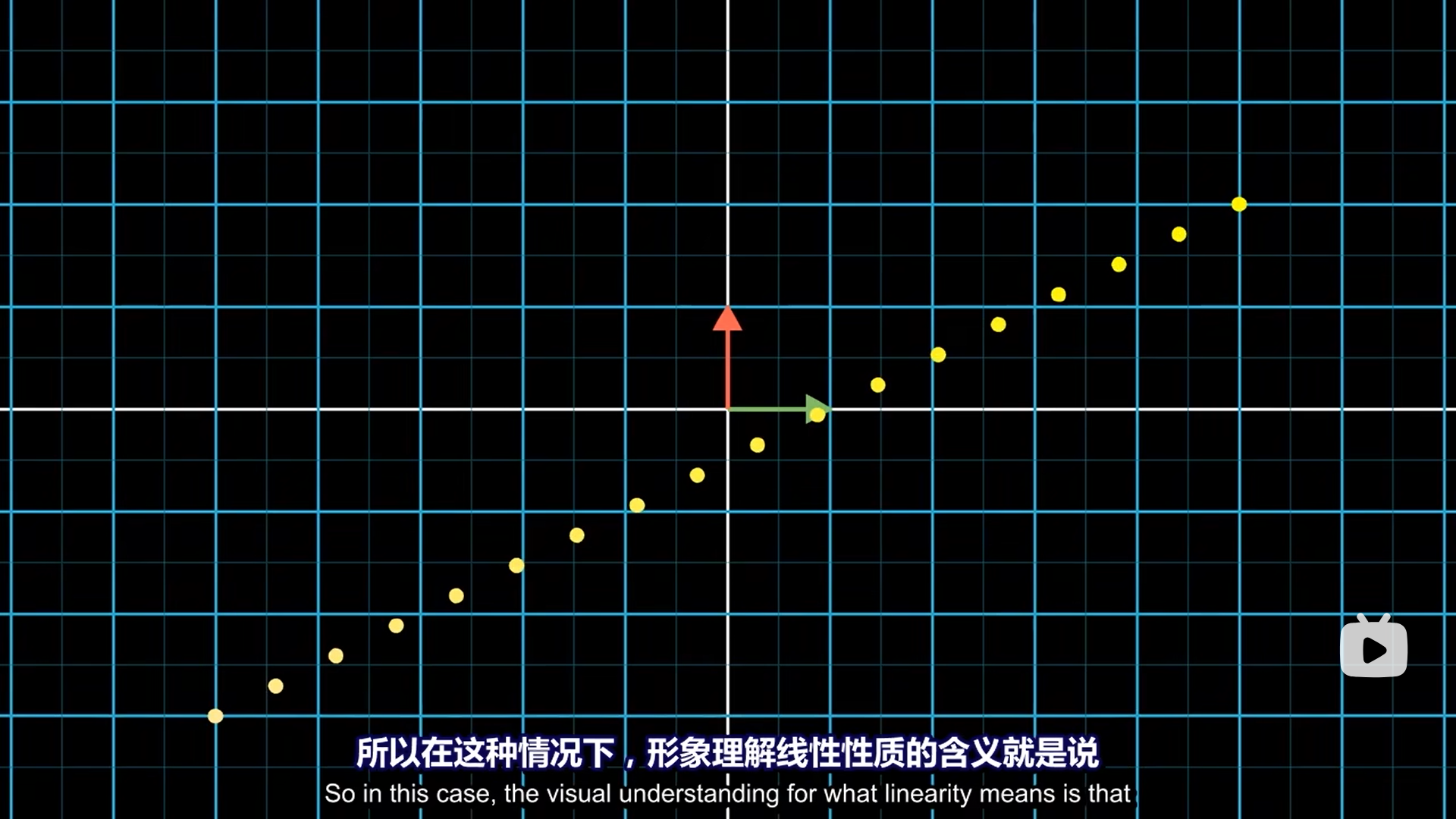
二维也可以压缩到一维,根据线性性质,平面上等距的点,压缩成数后,仍然等距。

个人补充:秩与空间维度
矩阵的秩,r(A),这个东西经常在线代中出现
给定n个向量,为什么r(A)<n就等价于线性相关?都可以用秩和维度来解释
秩的几何意义
秩的几何意义即基底张成的线性空间的维度
比如给你两个线性无关的向量,那么秩一定是2,两个向量可以张成平面,n个线性无关的向量,则秩为n,空间维度也是n
用空间维度视角看,可以解释特别多的公式:
给定n个向量,如果β可以被这n个向量线性表出,那么r(A,β)和r(A)就相等,为何?
仔细回想两个向量作为基底的情况,其线性表出的向量一定是在这个平面之中的,也就是说无论如何都逃不出基底张成的空间,既然逃不出,那么有没有这个新表示出的向量,都不会影响原有空间的维度
当把这个思路用秩描述出来,就是r(A,β)=r(A),加不加β都不影响原有空间的维度(秩)
那么按这个视角,线性相关的定理其实也很简单:
给定n个向量,n个向量总共的秩小于n,则线性相关
这是因为,秩<n,代表空间维度顶天也就n-1。而我们前面说了,每多一个线性无关的向量,张成的空间维度就要+1,顶天n-1维,那么最多n-1个线性无关向量,至少有一个向量是落在原有n-1个向量张成的空间内的,换句话说,这个向量可以被剩余n-1个向量线性表出,这不就是线性相关吗?
秩的决定因素
秩的意义就在于维度,那么线性空间的维度到底受什么影响呢?是m,还是n?
实际上,r(A)≤min(m,n),你想过为什么吗?
先说一下m和n代表什么。m代表一个向量里有几个分量,而n代表线性空间的基底数量。
我们放一个例子
首先是m>n的,此时每个向量用3个分量表示,分别是xyz,第一反应是这个空间一定是三维的吧。其实不然。
分量的数量(m),只能决定空间维度的上限,比如说你用xyz,不可能描述出4维空间,但是可以写出一个平面方程,即空间的维度数不能突破分量的上限
也就是r(A)<m
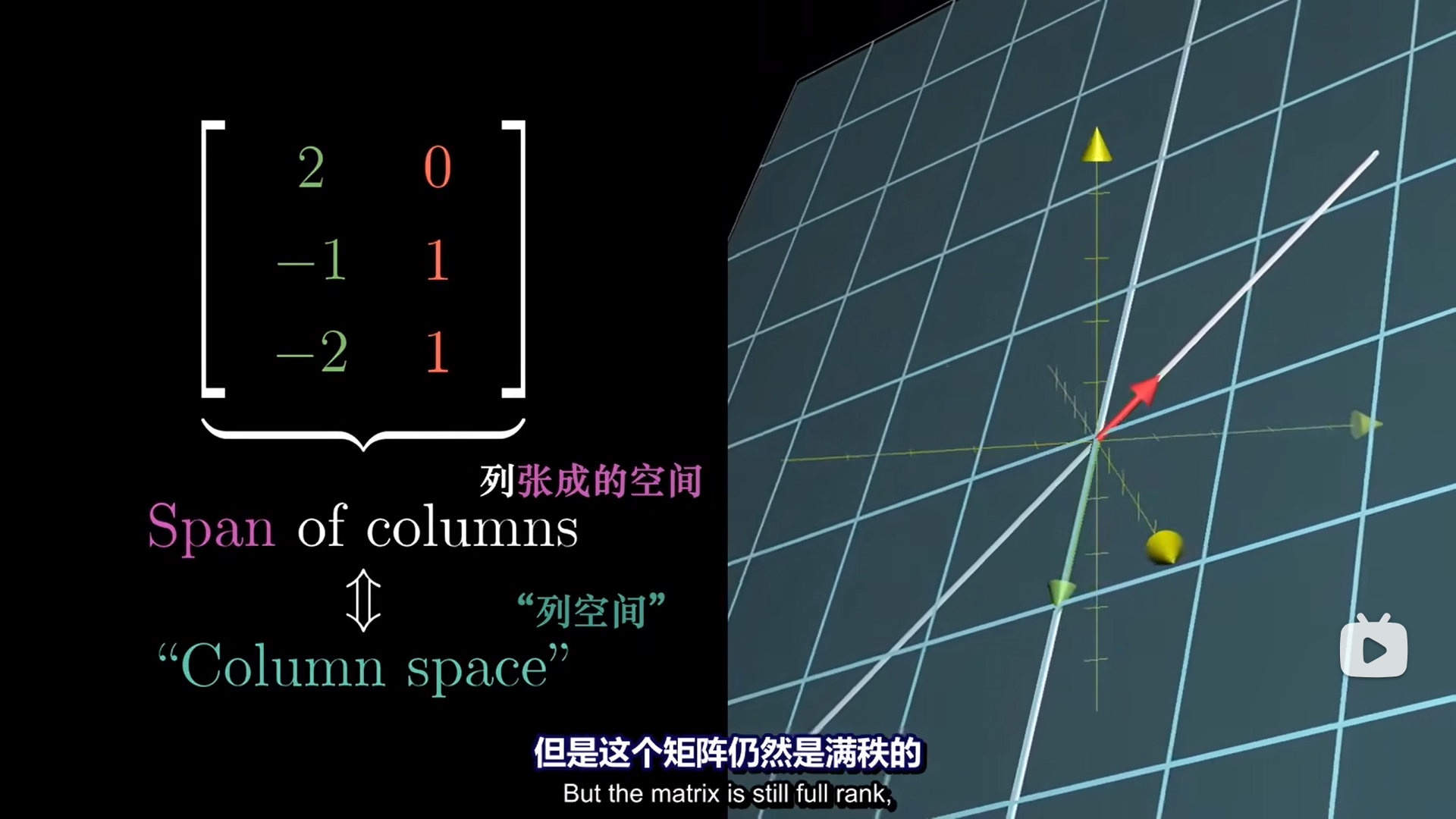
再来看n。n代表基底,张成的空间维度不可能超过基底数量。因此可以看下图,虽然整个大空间是3维,但是我现在只有两个基底,我也只能张成一个二维平面,只不过二维平面是放在了三维空间中,是倾斜的。
也就是r(A)<n
总的来说,其实就是m决定了整个空间的维度上限,无法突破。然后在m的限制下,给定n个基底,我们可以去张一个空间出来,有几个线性无关向量,则空间维度就是多少。
秩的计算原理
说了这么多,如何计算出空间的维度呢?
我们一开始学矩阵,就学了这个方法:化简为阶梯型,阶梯型中非0的行数就是秩
我们看维度,根本是看线性无关,而0行的所有列都是0,是否线性无关是不影响的,所以我们完全可以忽略0行。
只看非零行,关键在于主元。化为阶梯型后,主元所在的列,一定是线性无关的,[0,1]和[2,0],这两个列向量一定是线性无关的。那么非主元列呢,一定可以被主元列表示出来,也就是说这几列是可有可无的。
换句话说,如果主元有k个,那么r(A)=k
最后再收网,主元个数=非零行数,因此r(A)=非零行数
这就是为什么这套流程能算出秩的原因了,这套理解打通了从主元到秩,到空间维度的整个链条,主元可以说是联系了行和列的关键。包括后面理解基础解系的时候,其实也都可以沿用这个思路,就是这么自信。
毕竟,怎么会有本质解释不了现象呢?
个人补充:行列式的本质与发散
“三行四列行列式怎么算?”
我们都知道三行四列行列式不能算,但是似乎只是因为规定不能算而不能算,而没有思考过为什么三行四列行列式没意义。
首先要明白行列式的几何意义:线性变换导致的空间尺寸变化倍数。
如果det=2,那么假设原来空间里有一个方块,变换后的平行四边形面积就是原来的二倍,带负号则代表空间翻了个面(定向改变)
然后你就会明白,当矩阵变换导致空间降维的时候,面积倍数肯定是0,比如你把平面压成线,面积必然是0,因此
降维等价于det(A)=0
而降维实际上代表着线性变换矩阵里面的向量不足以撑起对应维度,也就是线性相关,因此才有
线性相关等价于det(A)=0
而你都降维了,自然不可能还原回去,就好比你可以把人照成纸片人,但是给你一个纸片人,你是无法把他变成人的,因此
det=0又等价于矩阵不可逆
我们这些讨论都是方阵,方阵分为降维和不降维的情况,自然有讨论的必要,而非方阵必然有维度变化,自然没有用行列式的必要。
这里说的维度是指整个空间的维度,而不是基底张成的线性空间的维度,比如下面这个图,虽然是平面,但是实际在三维空间,那么他的尺寸度量实际上就是0,空间整体的度量都变了,讨论尺寸变化倍数又有什么意义呢?
因此回收开头,你问我三行四列行列式怎么算,我要反问你一句,算出来又有什么意义?
点积
这一节比较难,我上来没听懂,关键在于那个对偶性,对偶性容易和对称混淆,其实完全没关系,要是我说的话,对偶性就是一种一一映射,是唯一的等价关系。
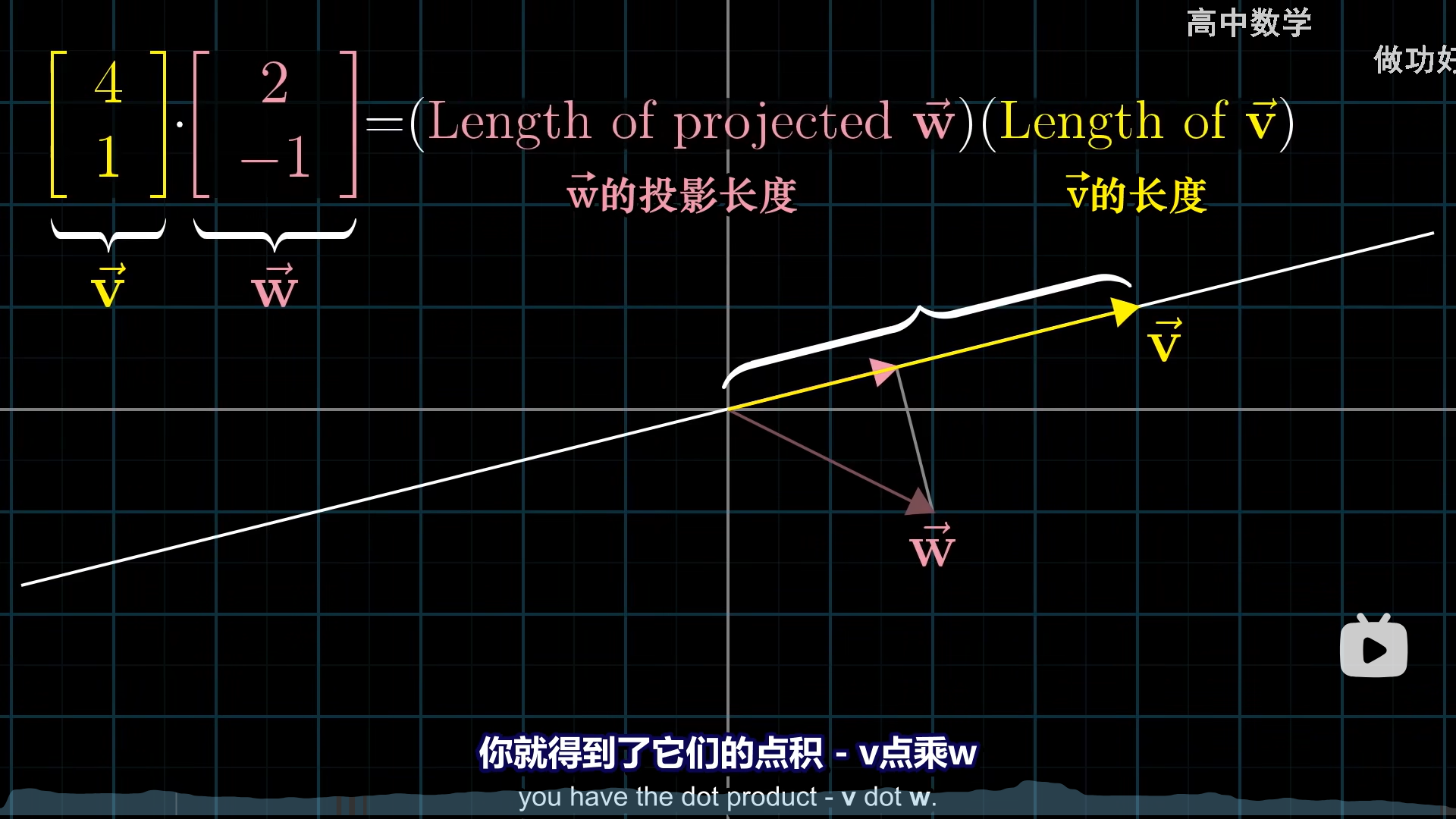
点积的计算公式是把对应的坐标相乘,并把结果相加。另一种计算方法是,把一个向量投影到另一个向量上,模之积就是点积。这两个计算方法看起来毫无关系,他们的联系是什么呢?
记住,我们的目标是发现点积,线性变换,投影的联系,现在讲引理。
我们前面说,线性变换可以把线性的空间变成线性的空间。
那么反过来,只要是把线性空间变成另一个线性空间,就一定有一个,且只有一个唯一的线性变换与之对应。
注意这个唯一性,即使是把二维空间压缩为数轴,不同的压缩方法,其放缩倍数都是不一样的,所以是新的线性空间对应唯一的线性变换。
引理说完了,先来寻找一下和单位向量点积是如何与投影联系起来的。
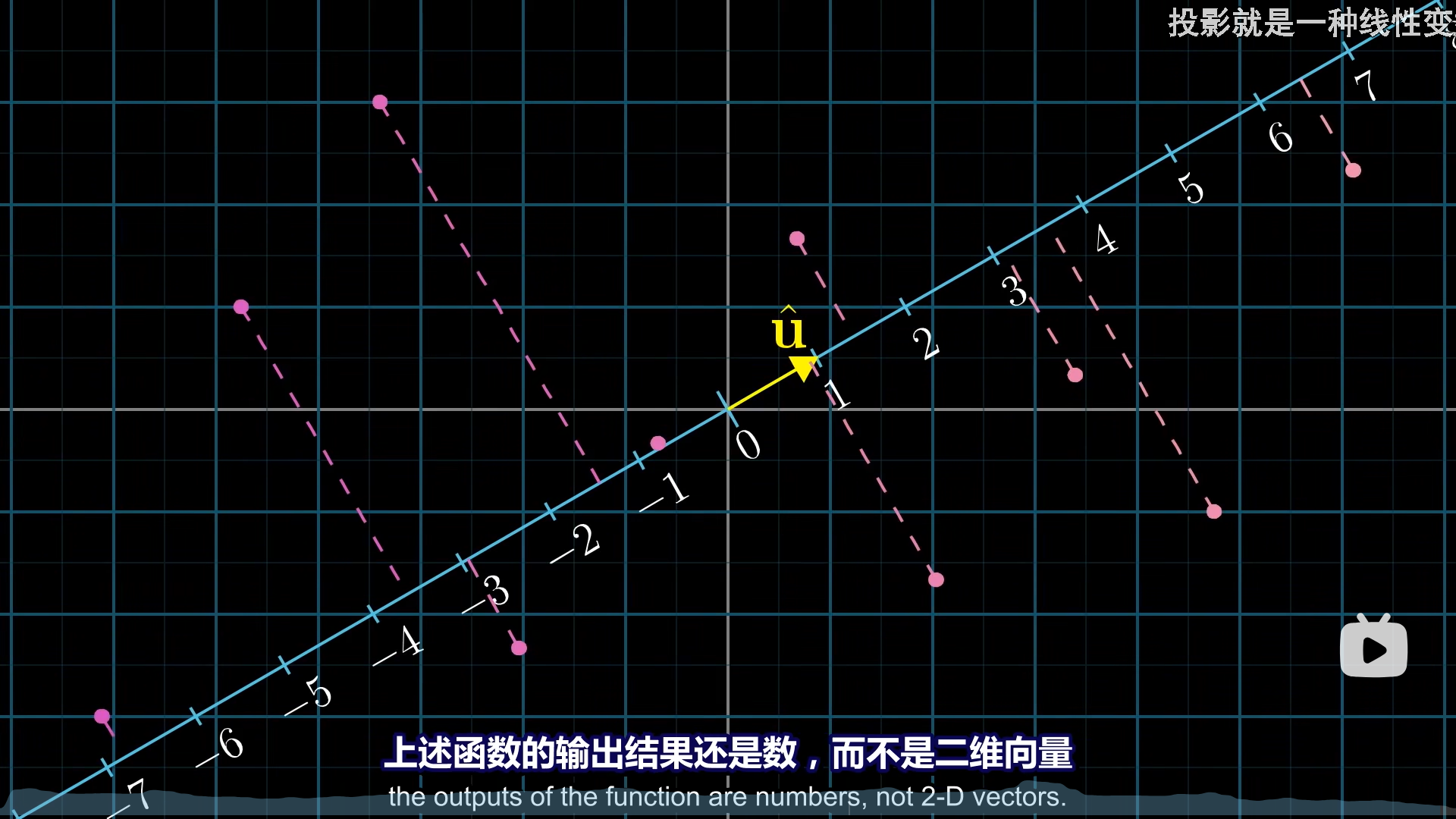
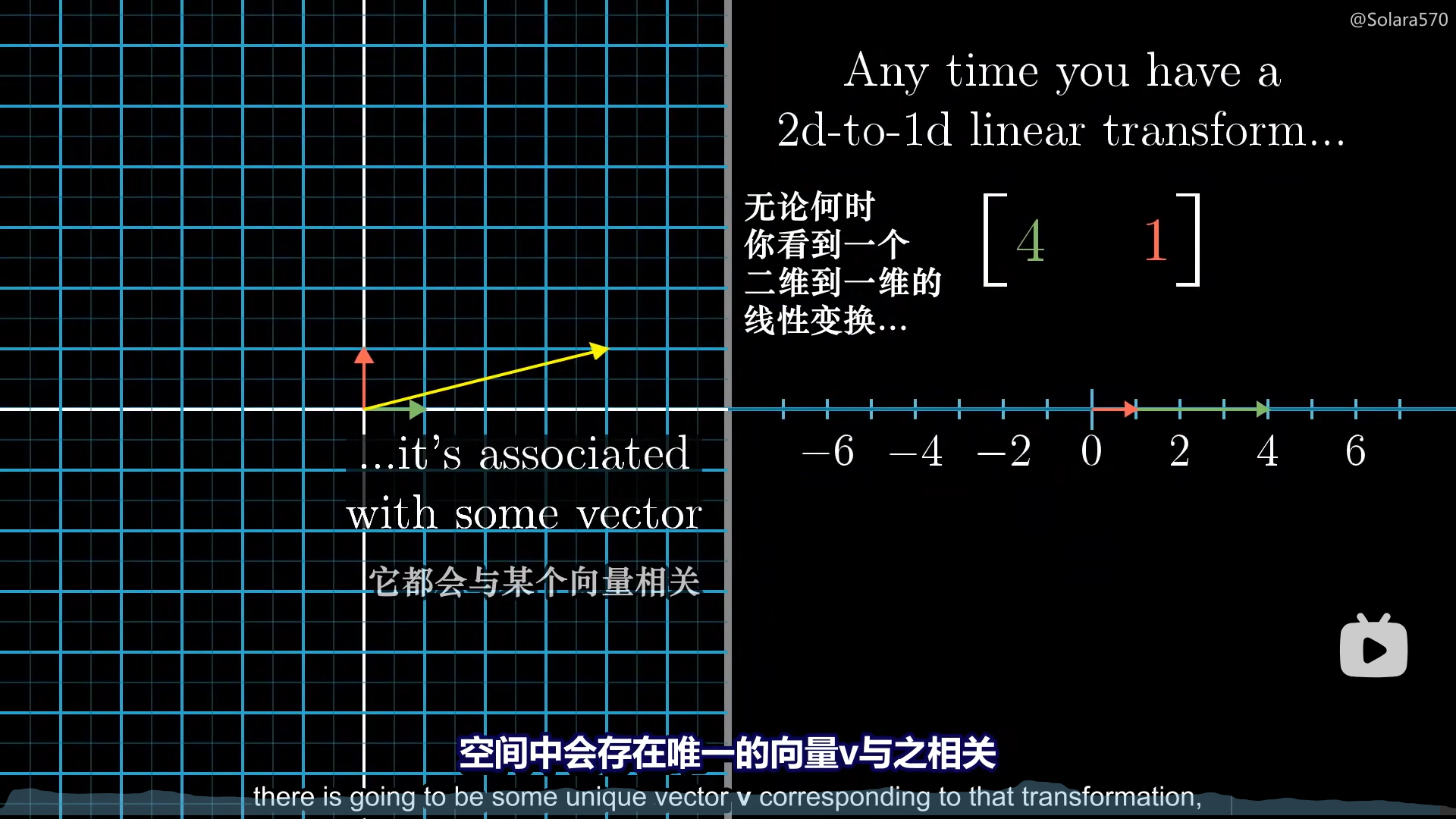
首先,投影是一个线性变换。把二维空间的向量,投影到一条直线上,很明显这是个线性过程,而且还是二维到一维的。
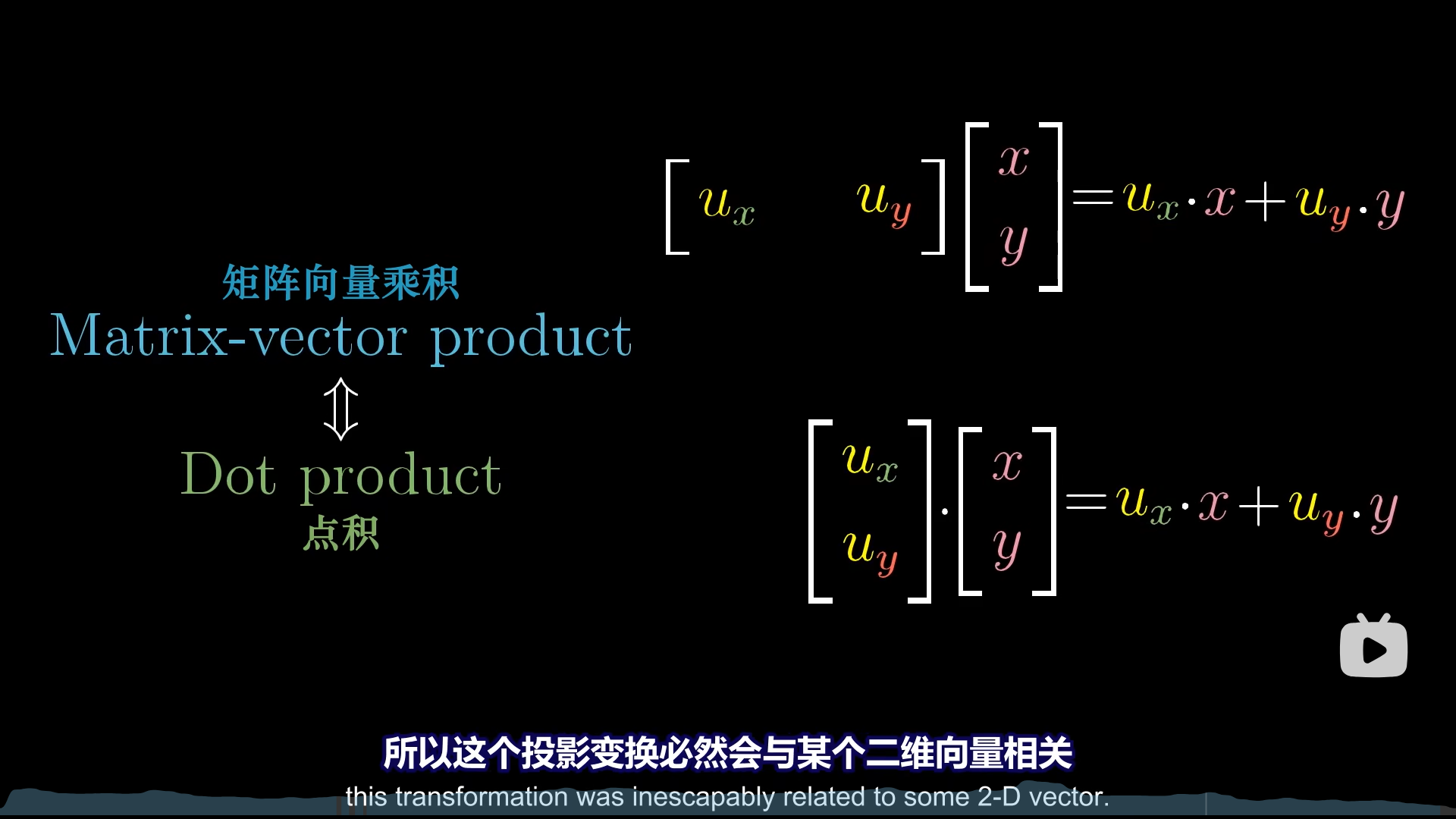
根据对偶性,只要是线性变换,就一定有一个1×2的矩阵与之对应,即投影矩阵。
投影矩阵到底是多少呢?按照线性变换的几何意义,我们只需要找到i,j两个向量在目标直线上的位置,也就是他们的值就行。
此时引入一个单位向量 u ^ \hat{u} u^,根据对称性,i在直线上的投影值(新基底),恰好等于u的x轴
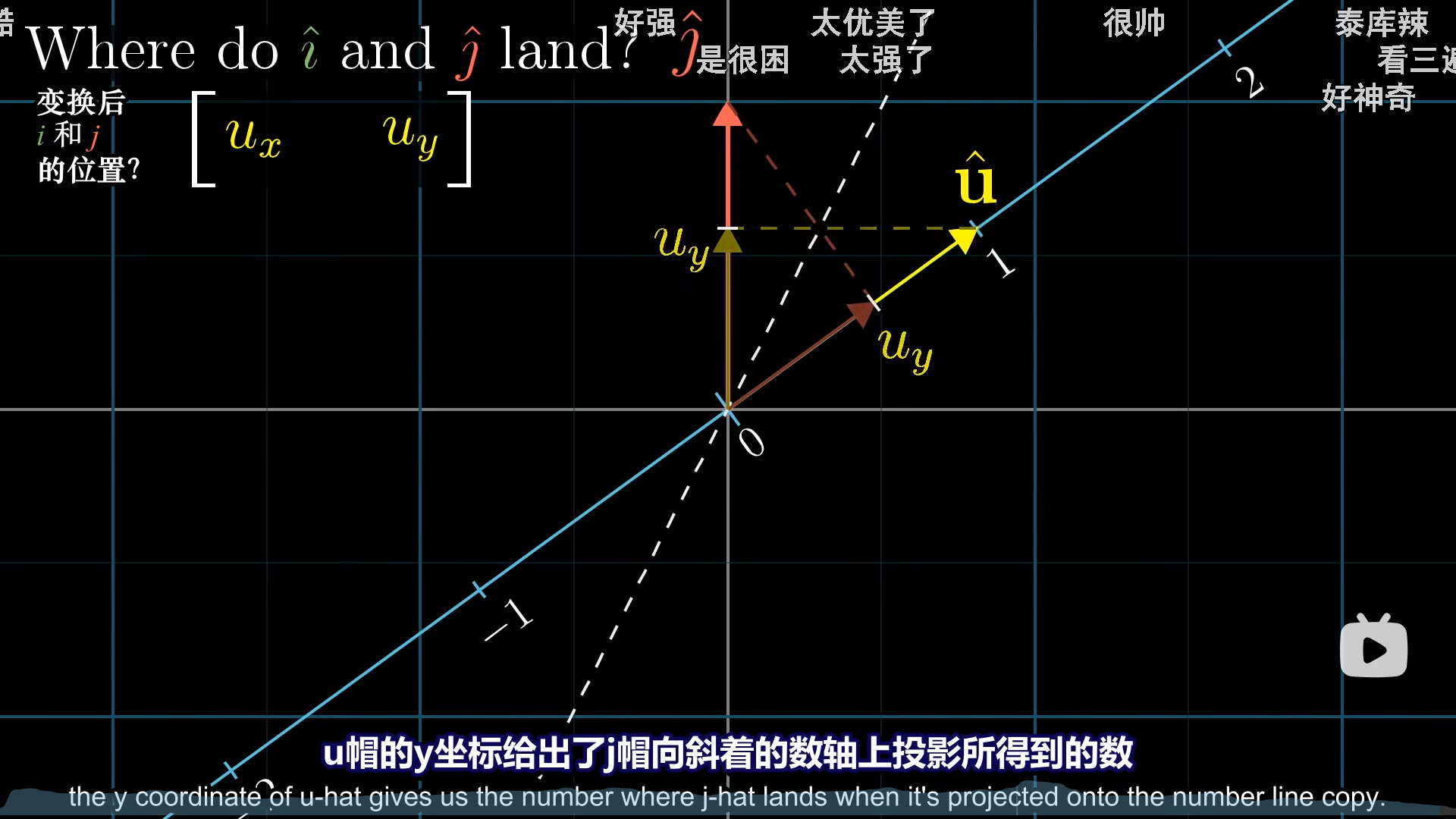
这样,我们就用线性变换表示出了投影运算,这是几何上的联系。
从数值上来看,向量通过投影矩阵进行线性变换,投影到单位向量所在直线上的值,恰好等于向量和单位向量的点积。
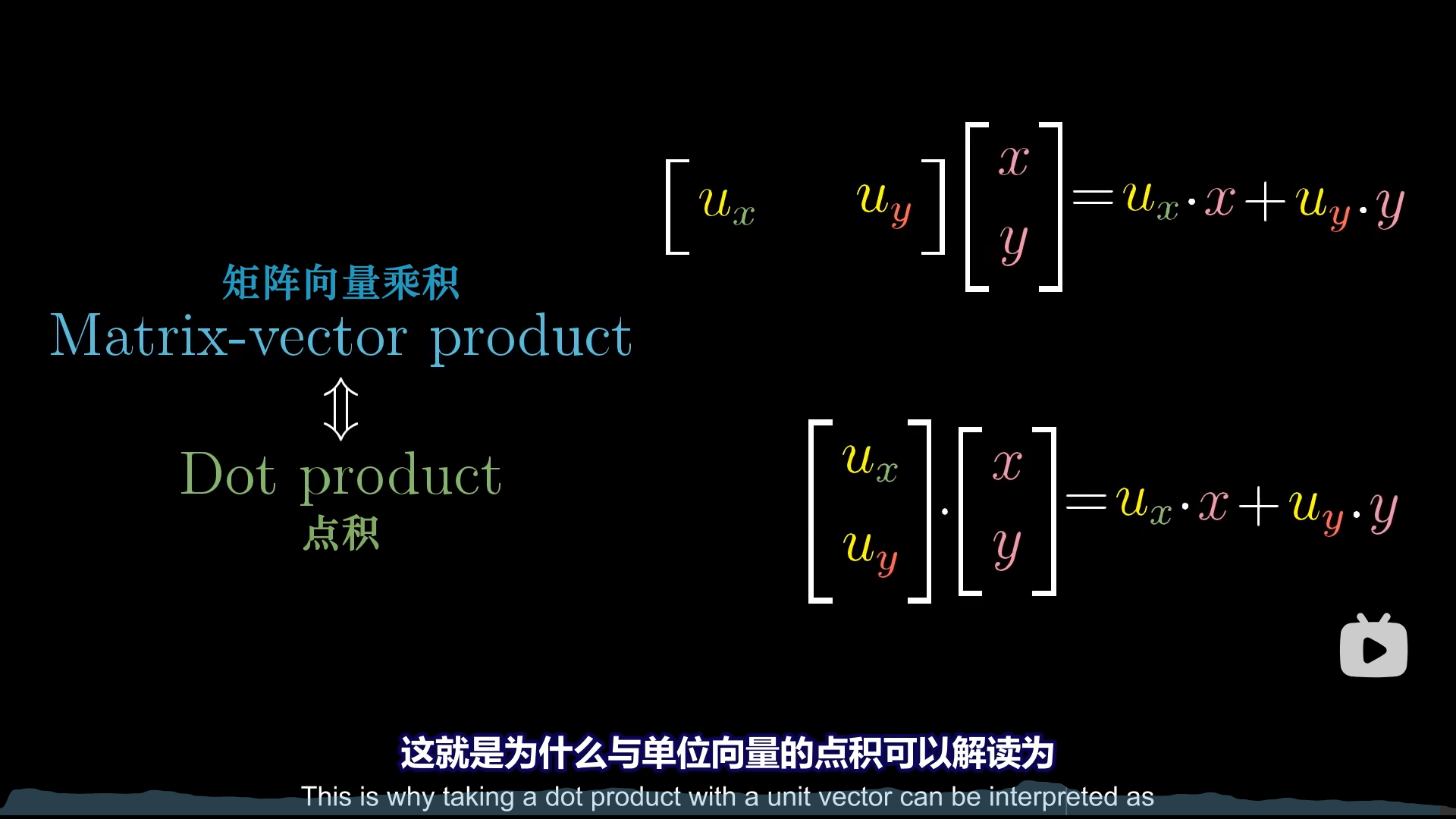
投影——(几何)——线性变换——(数值)——点积
整个对于单位向量,证明思路就是这样。
非单位向量呢?
非单位向量只是单位向量的放缩,计算点积的结果仍然是数,整个过程仍然是从二维到一维,所以仍然对应一个投影矩阵。
只不过因为投影后基底要放缩,所以投影矩阵整体是要比单位向量情况放缩k倍的,这个矩阵可以理解为先投影,再缩放(乘以向量的模)。
至于点积和线性变换,仍然是数值上的联系。如此,投影和点积就彻底联系起来了。
总的来说,这个证明过程用到了线性变换与矩阵的唯一对应性,也就是对偶性。
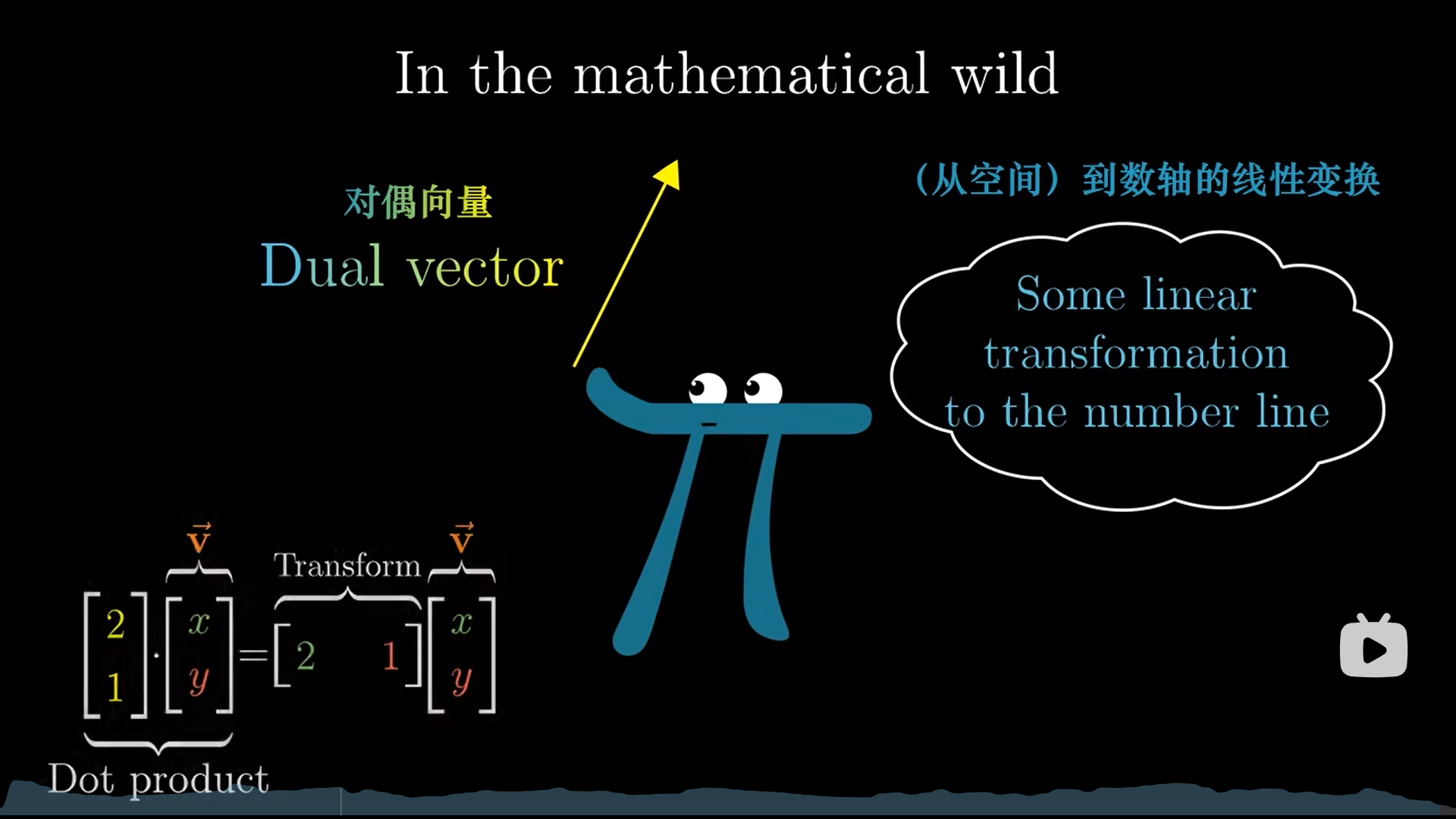
对于n维变1维的情况,必然有一个n×1的矩阵可以表示这个线性变换,把这个矩阵转置成向量,我们也可以说,任意一个n维变1维的线性变换,一定有一个空间中的向量v与之相关,这就是点积和线性变换的等价性。
叉积
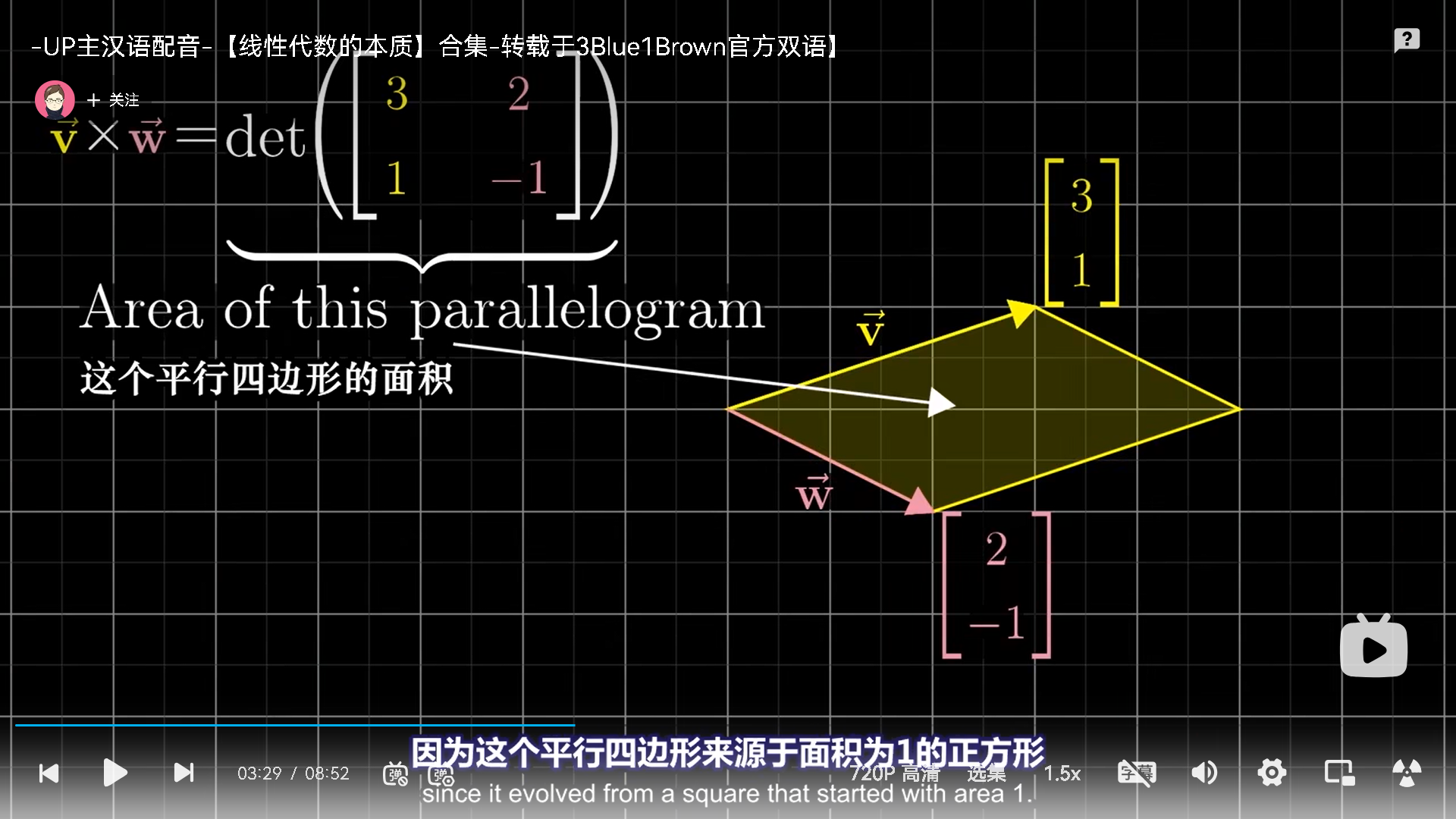
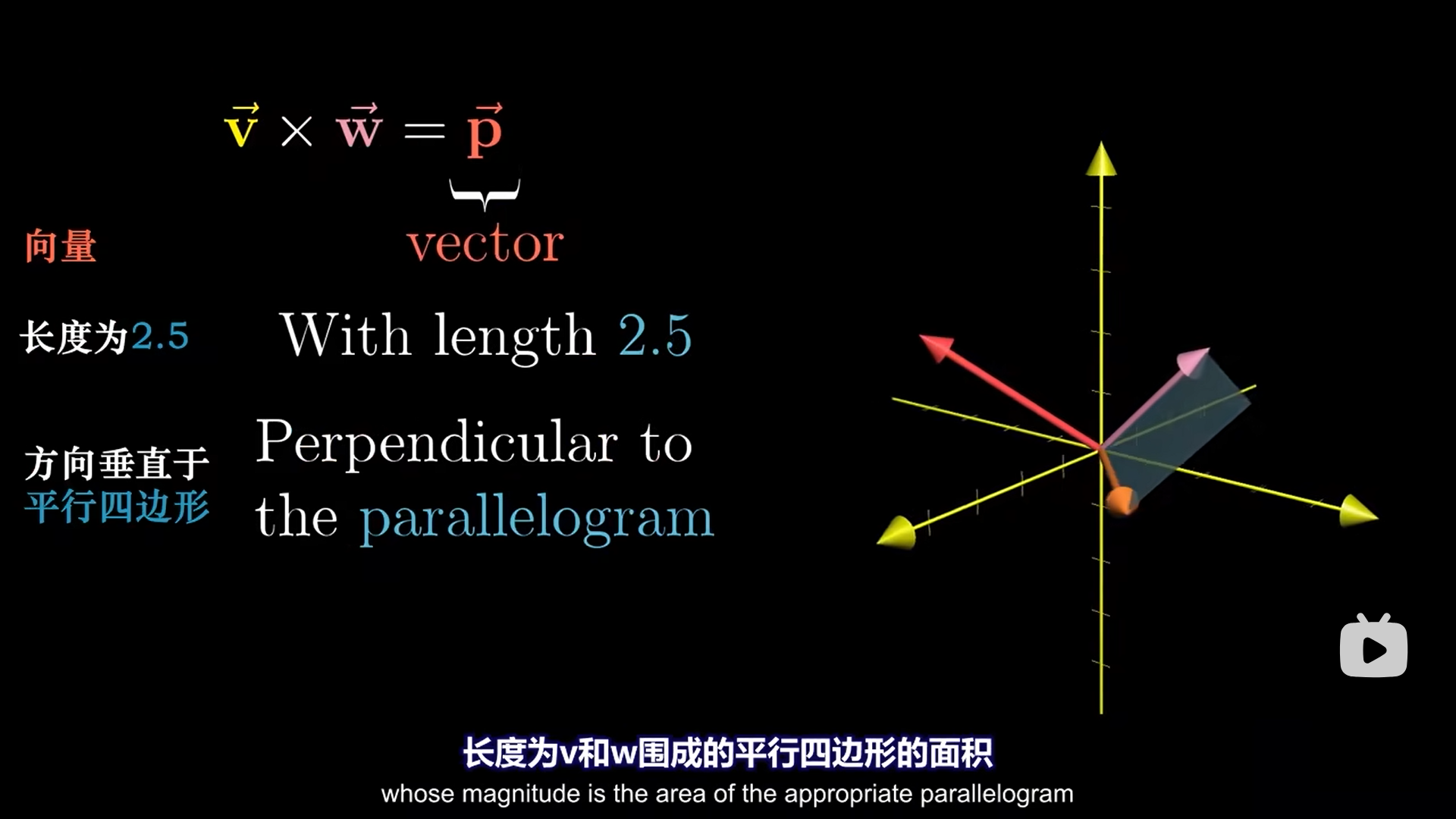
叉积结果的模,平行四边形的面积。
行列式的几何意义,恰好也是线性变换的放大倍数,就用叉积的两个向量当线性变换,计算行列式就等于叉积结果。
当然最后要定向,分正负。
实际上,叉积是一个向量,垂直于底面,模是底面积。叉积可以说是一个代表底面大小和方向的向量。
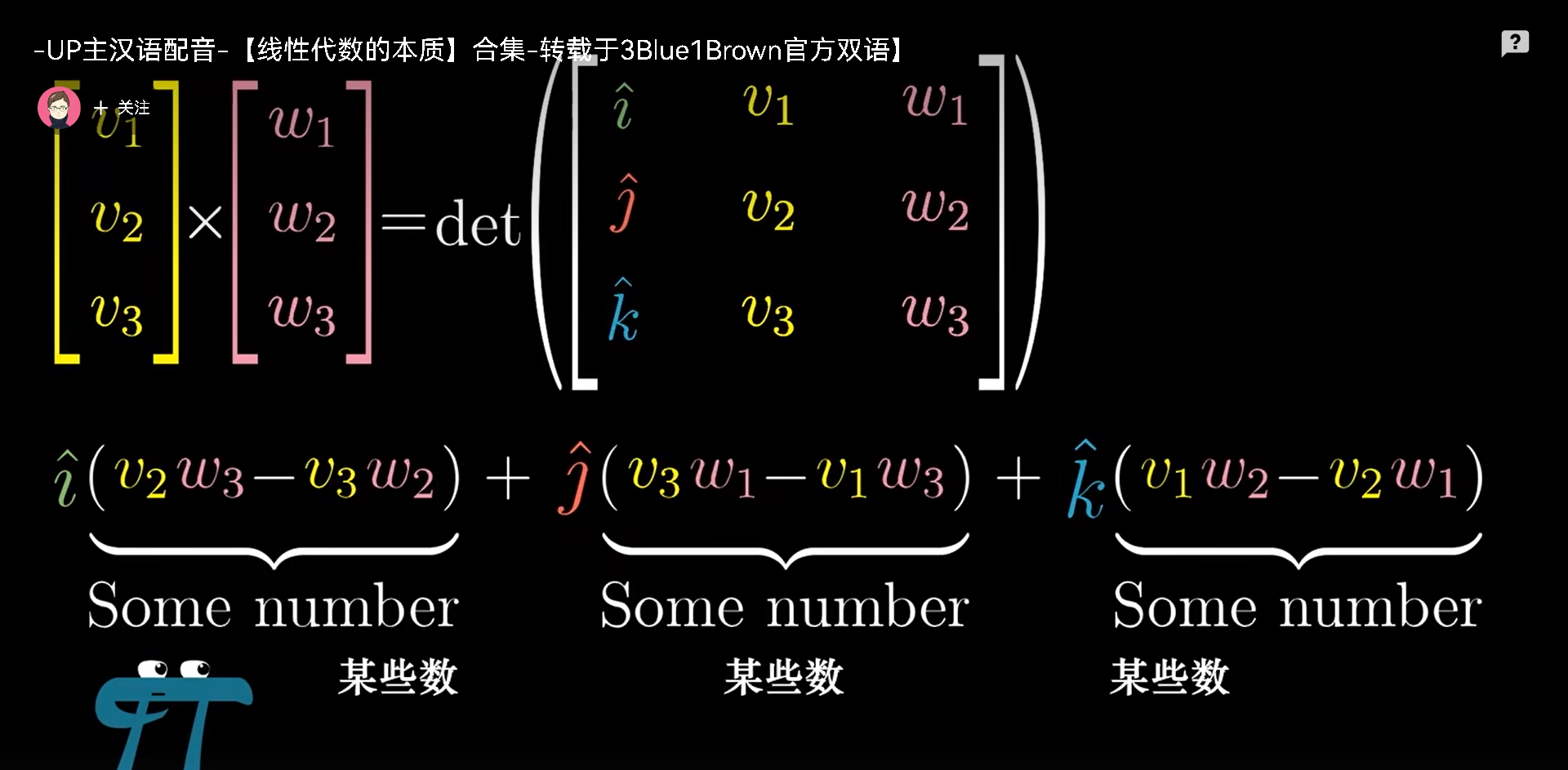
具体如何计算叉积呢?就是用行列式, 好啦,问题来了,行列式怎么和叉积的几何意义联系起来的呢?还是对偶性。
一个线性变换,可以等价于和对偶向量的点乘。
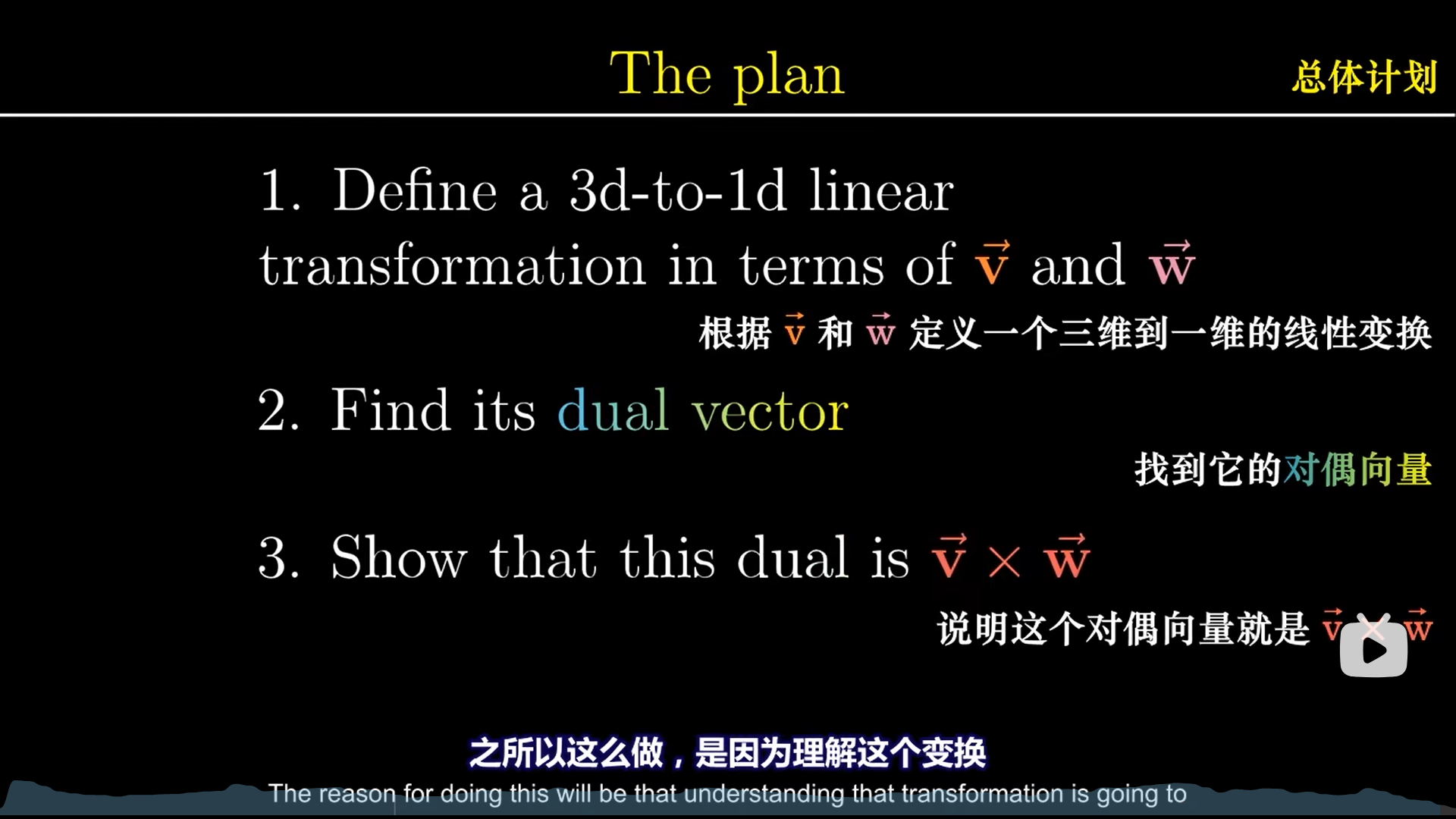
整体的计划如下:
- 首先通过v和w构造线性变换
- 然后求出对偶向量,这个对偶向量恰好就是叉积
- 而且这个求对偶向量的过程,恰好也就是通过行列式计算叉积的过程。
这是一个输入向量,输出值的函数,行列式计算结果代表平行六面体的体积,很明显这是个线性变换(行列式的特点就是这样)。
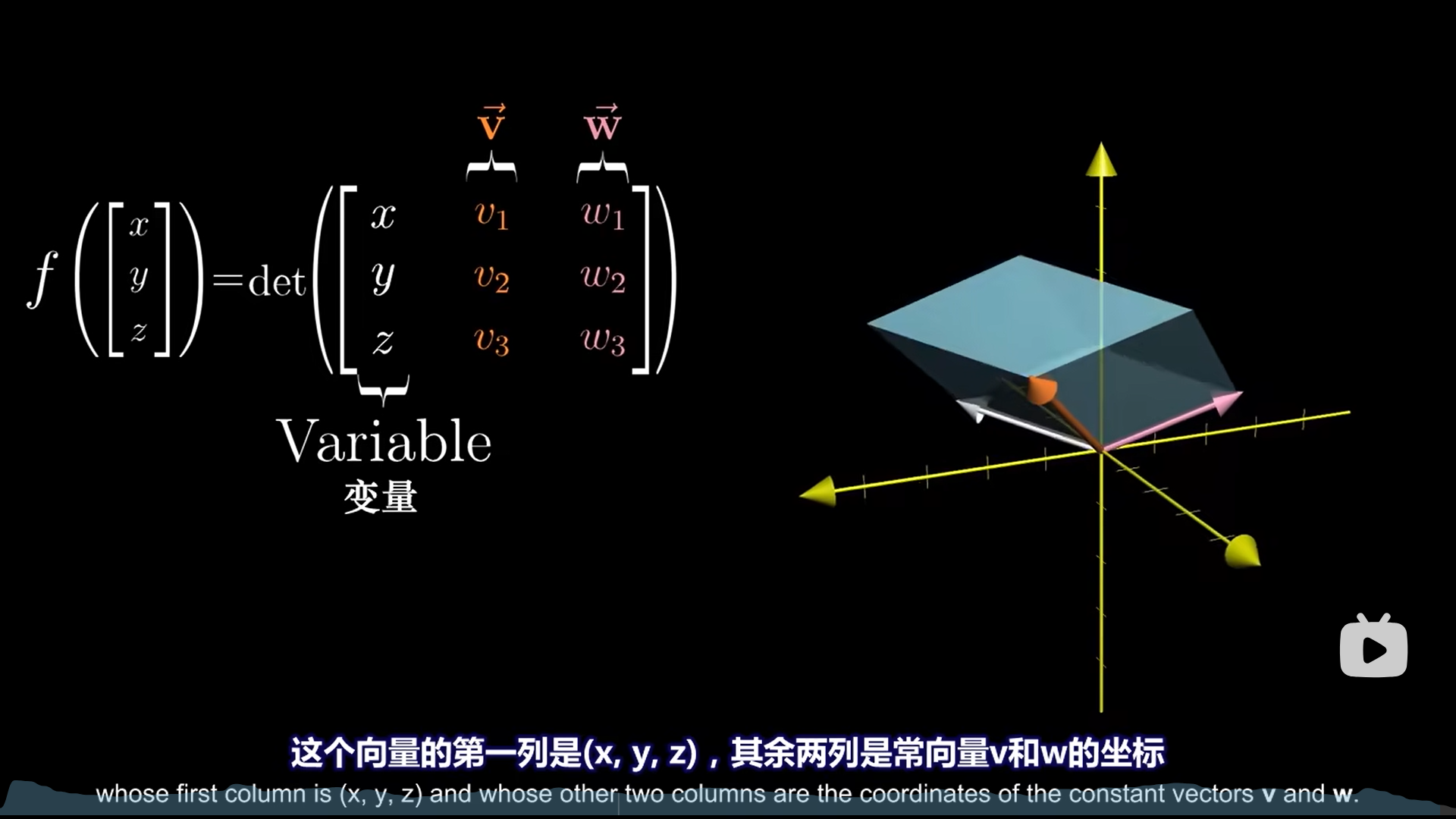
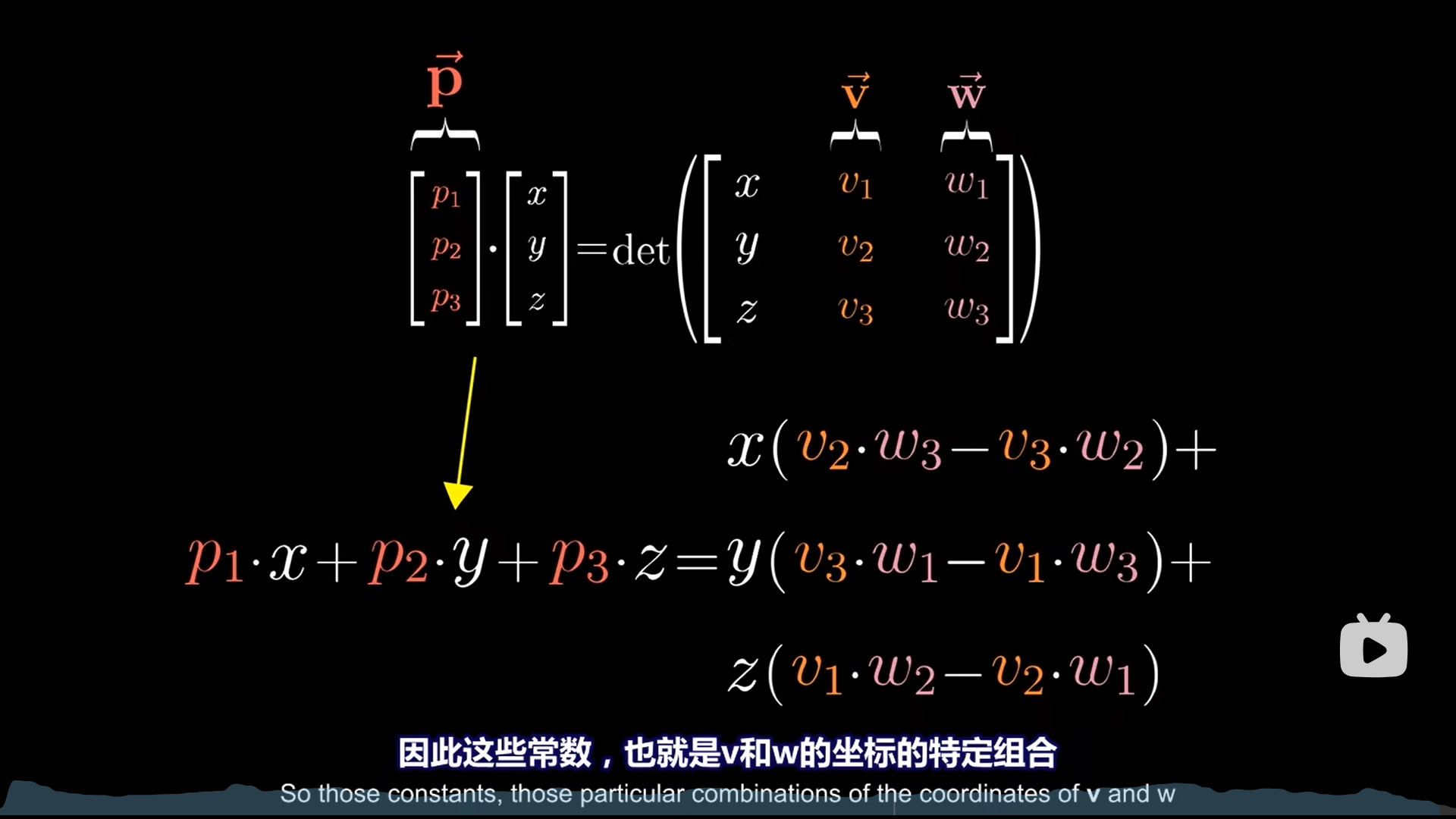
根据对偶性,自然有一个1×3的线性变换,进而根据可以变成和3维向量点积,这个三维向量恰好就是我们要的点积。
之所以叉积要用ijk去代替xyz,写成行列式的样子,其实原理就在于此,ijk只是告诉你,算完以后的p是一个向量。
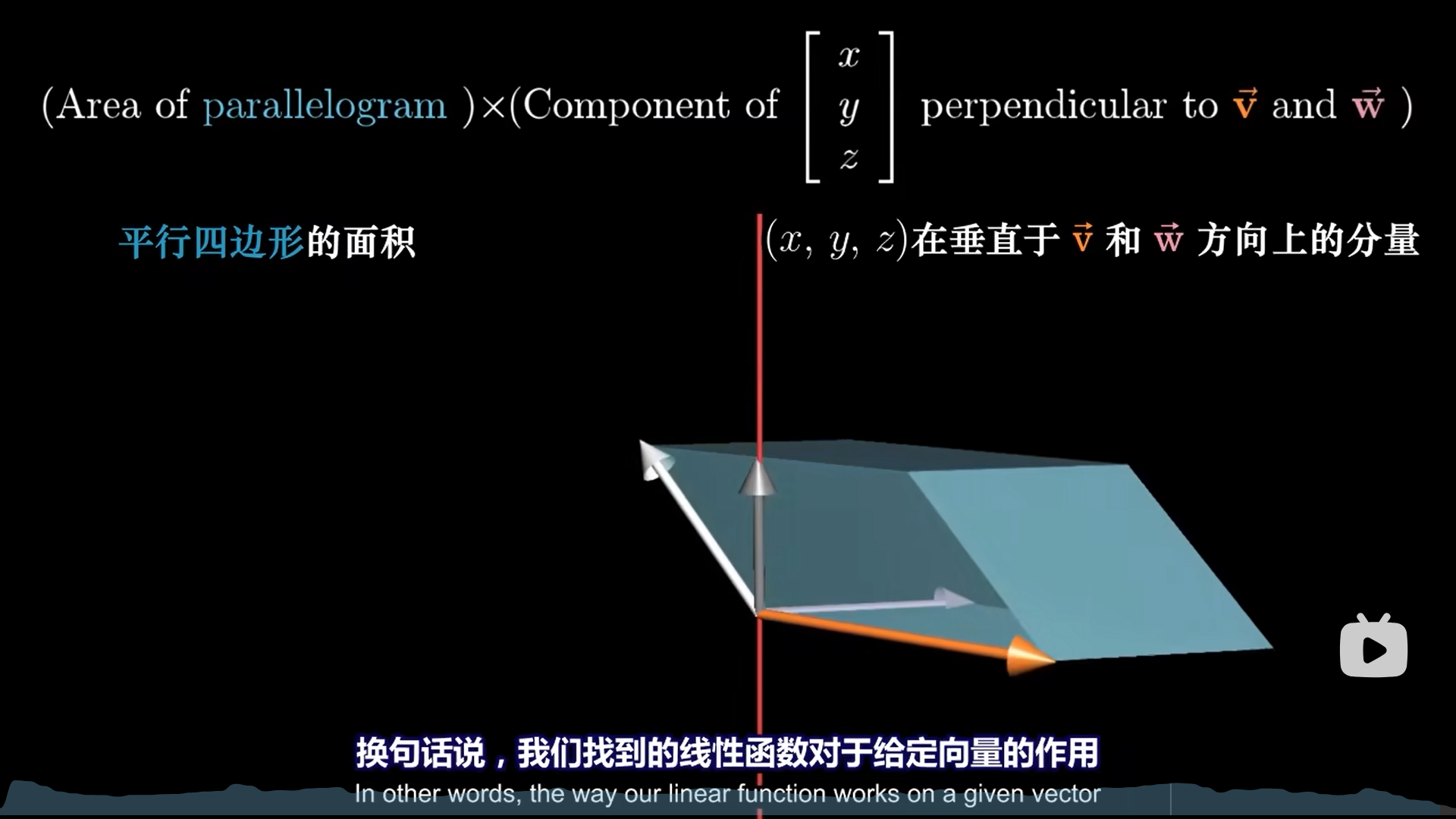
我们到这里只是给出了p的公式,还没有解释为啥p的模就等于底面积。
还得从最开始,平行六面体的体积来看。设(x,y,z)向量为a。则V=底面积×高=a在p上的投影×p的模
你要注意,高=a在p上的投影,所以底面积就自然等于p的模了。
基变换
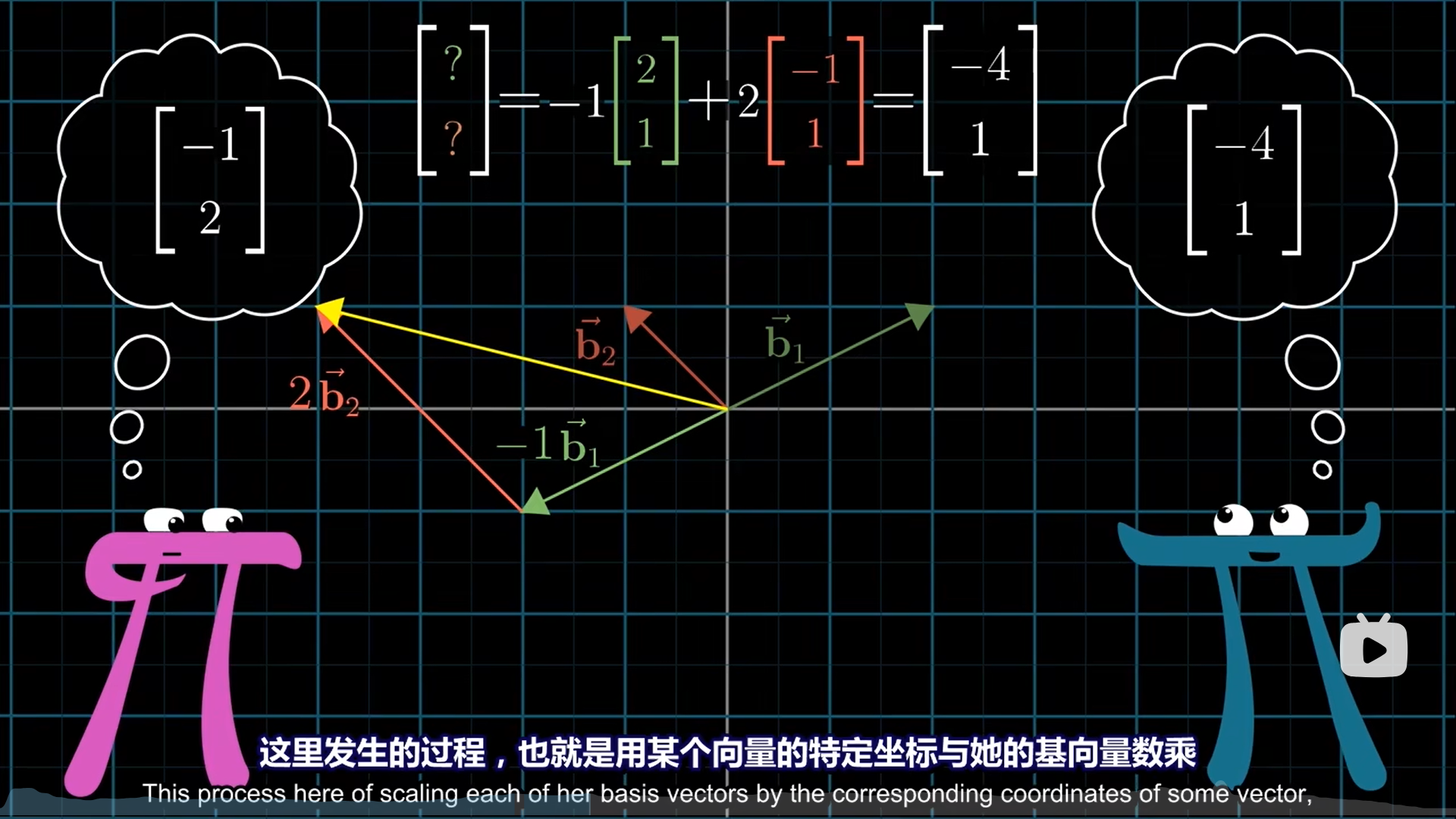
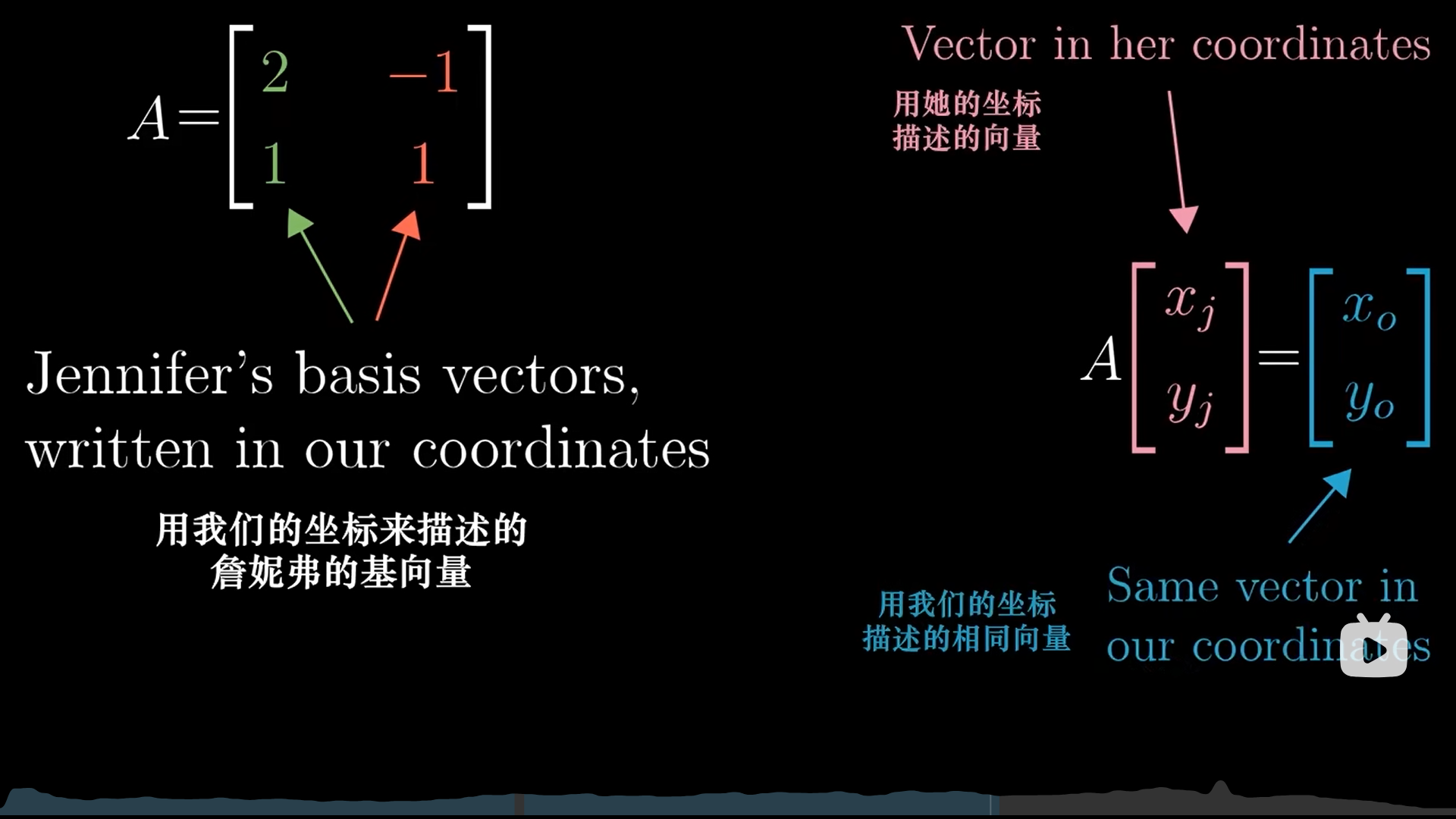
不同的坐标系(基底),对于同一个向量,其向量坐标值都是不一样的。
比如,在b1,b2这个坐标系中(称b空间),我们的向量坐标是 [ − 1 , 2 ] T [-1,2]^T [−1,2]T,但是在原始的i,j坐标系中(称ij空间),向量坐标应该是 [ − 4 , 1 ] T [-4,1]^T [−4,1]T
如何实现不同基底下,向量的变换呢?
其实就是线性变换。对 [ − 1 , 2 ] T [-1,2]^T [−1,2]T这个向量应用线性变换,就可以得到线性变换后的坐标值。
怎么去理解这个线性变换的过程呢?这里就有一个矛盾的点:
- 线性变换的含义是把我们这个ij空间变成b空间
- 线性变换的实际作用是吧b空间里的向量坐标转换为ij空间的向量坐标
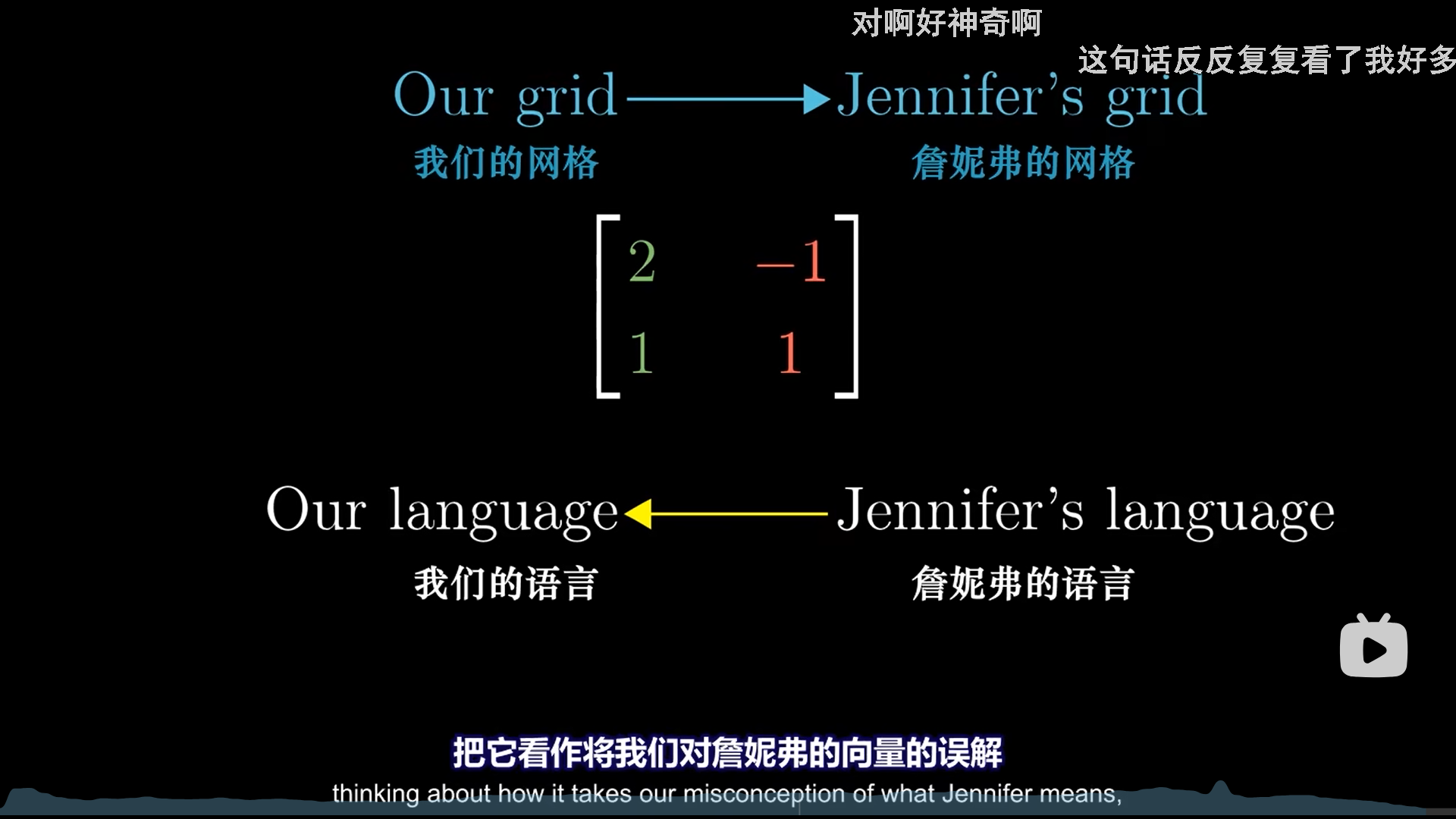
根本问题在于这里对线性变换产生了误解。
我们以前的线性变换,是给定ij空间下的向量,然后作用一个线性变换,变成b空间的向量。
现在呢?我们给的是b空间的向量,压根就不是ij空间的向量,所以这个线性变换起到的并不是线性变换的作用,只是把本应属于b空间但是被误以为在ij空间的向量,从ij空间变换到了b空间。
所以上面那两种解释,其实只是两种不同的理解:
- 给定ij空间向量,矩阵乘后,将其投射到b空间中,得到的是拉伸后的ij空间坐标
- 给定b空间向量,矩阵乘后,得到其实际在ij空间的坐标
无论用哪种理解方式,得到的结果都是b空间向量用ij空间基底表示出的坐标。
理解了正向过程,反过来也就好说了,把ij空间真正的向量坐标,再转化为b空间基底表示的向量坐标。
在不同基底下的坐标转换,理解了以后,来看一下对不同坐标进行线性变换应该怎么做。
首先你要明白,我们前面的矩阵,都是对ij空间的线性变换,如果要对非ij空间进行线性变换,是无法直接用矩阵的,人家的基向量就不是ij,我们的矩阵无法直接作用到人家的基向量上。
那么思路就应该是:
- 先把非ij空间变成ij空间
- 然后进行线性变换
- 再把ij空间还原为非ij空间
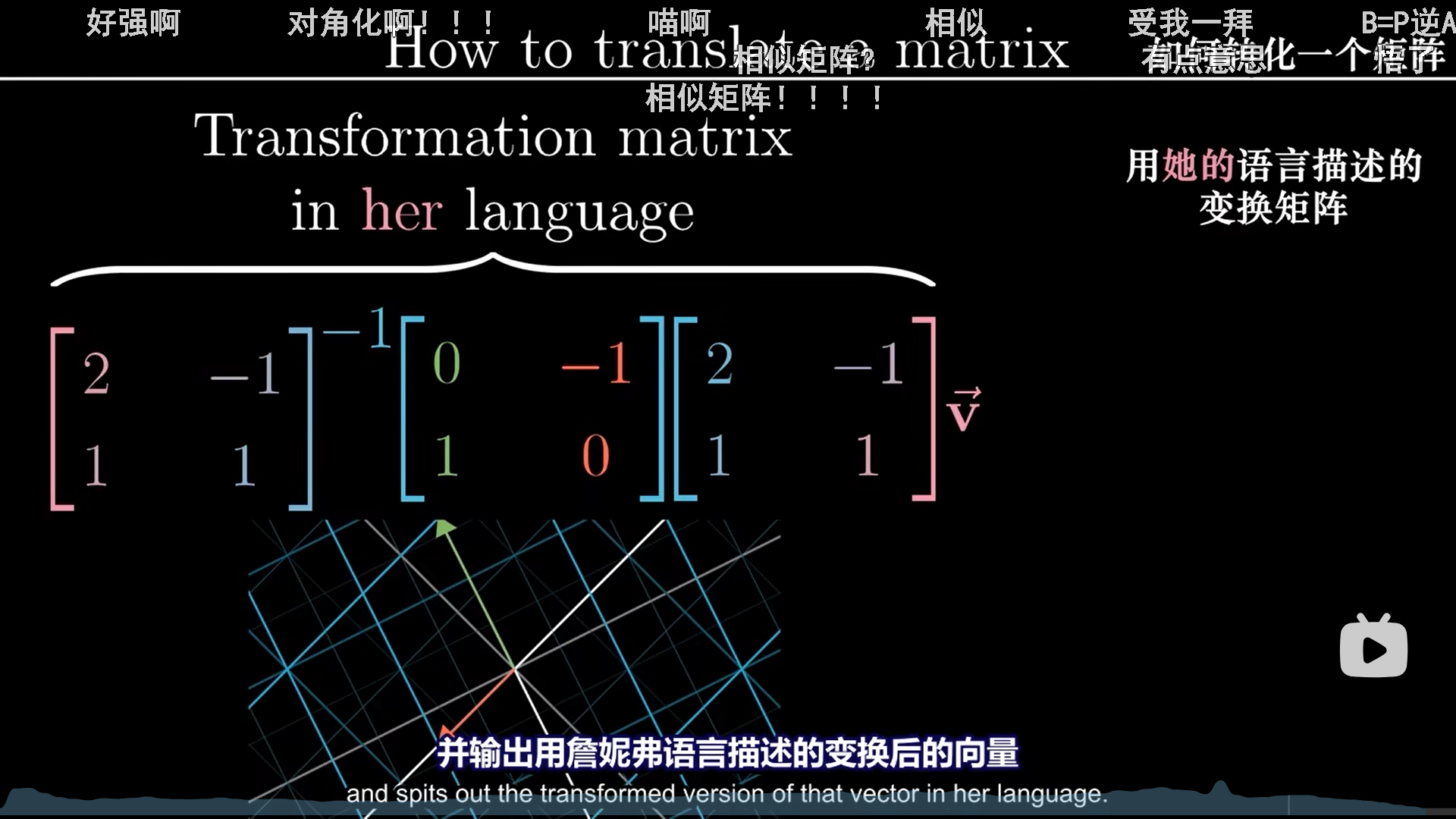
中间的M是任意的,针对ij空间的线性变换,左右两边只是负责基变换转换视角的。

特征向量与特征值
在线性变换中,大部分的向量,方向都偏离了原有的方向。
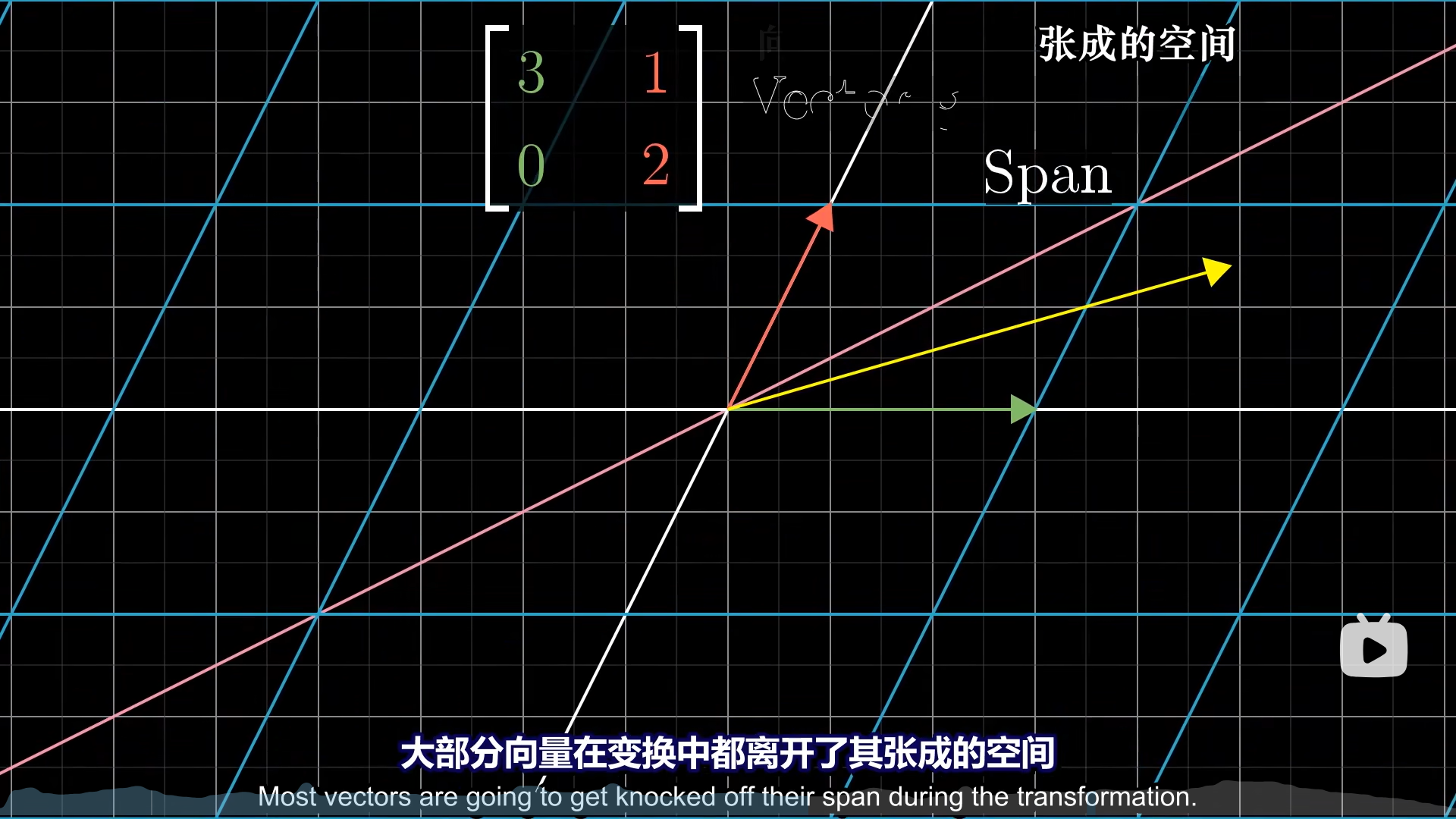
有一部分向量,方向不变,这个方向上的所有向量方向都不变,仅仅是被拉伸了,而且倍数是相同的。
这些向量都是特征向量,倍数就是特征值。
这种直线,不止有一条,每一条上都有上面这种特殊的性质,也就是说,一个线性变换的特征值可能有好几个。
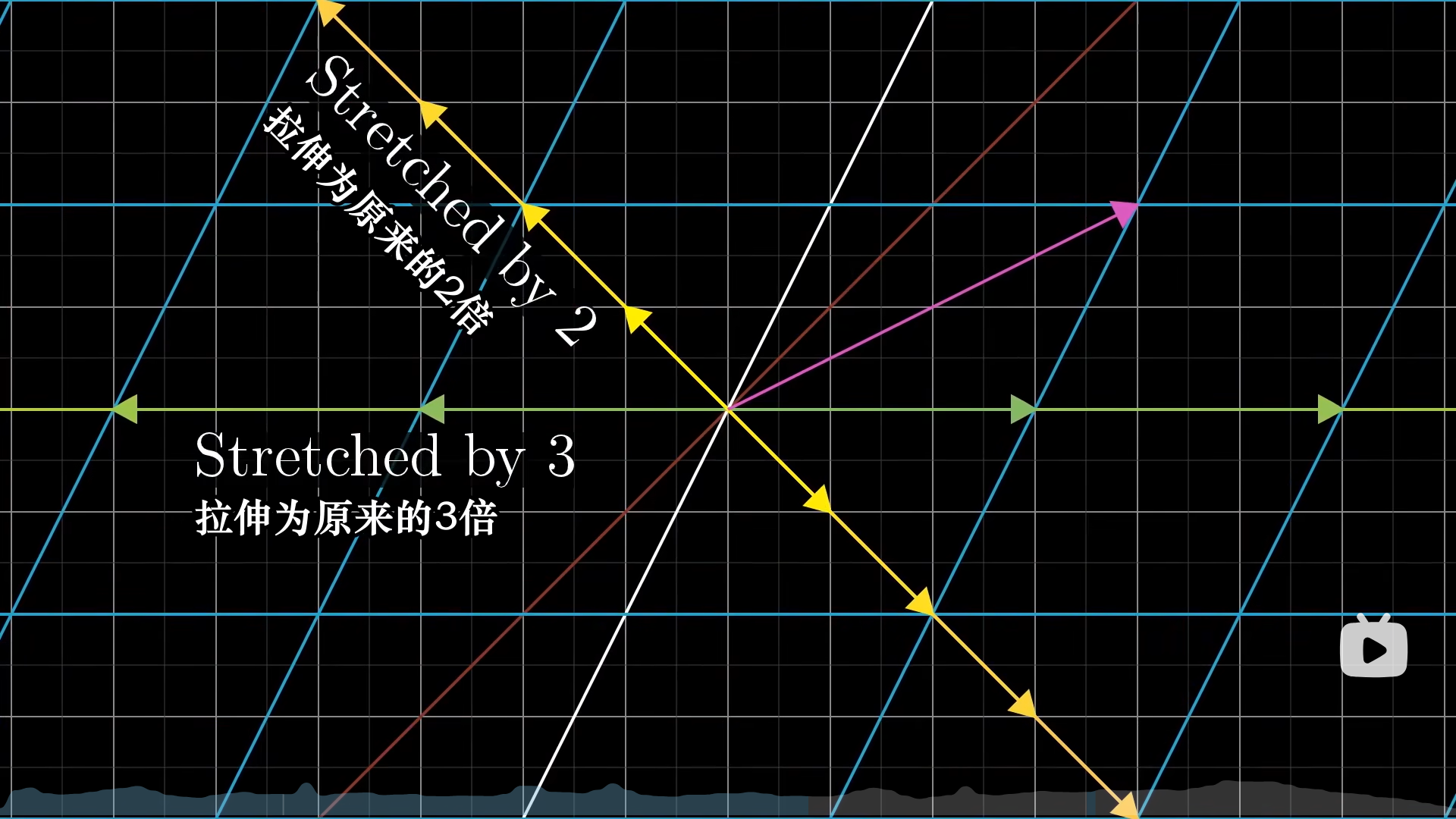
这玩意有啥用呢?对特征向量来说,就把一个线性变换简化成伸缩,这就是其意义。
在实际生产中,特征向量也有用,比如给你一个3D旋转变换,矩阵是非常麻烦的,但是你可以找到特征向量,特征向量那条线恰好就是转轴,而且特征值=1.
在数学理论中,特征向量可以用来从另一个角度理解线性变换。之前,我们是把ij变换到新的基底,实现空间的变换,在这个过程中,ij可能旋转,拉伸,比较复杂。
实际上,特征向量的数量和基底数量是一样的,那么我们不去看基底,我们把特征向量拉伸 λ i \lambda_i λi倍,也可以让空间变成我们目标的空间,这样理解就脱离了坐标轴,还原了线性变换的本质。
特征向量的性质讨论完了,该说说怎么算了。
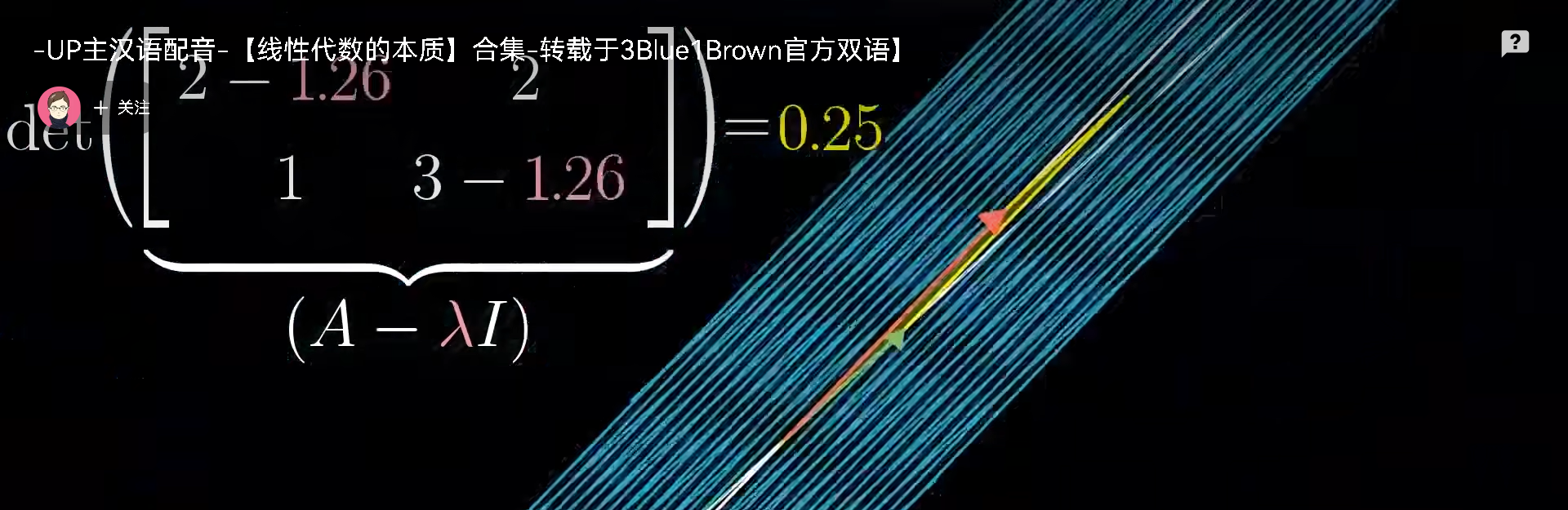
下面这个等式,刚开始学比较懵逼,现在理解起来就很直观了,就是把线性变换简化成拉伸了呗。
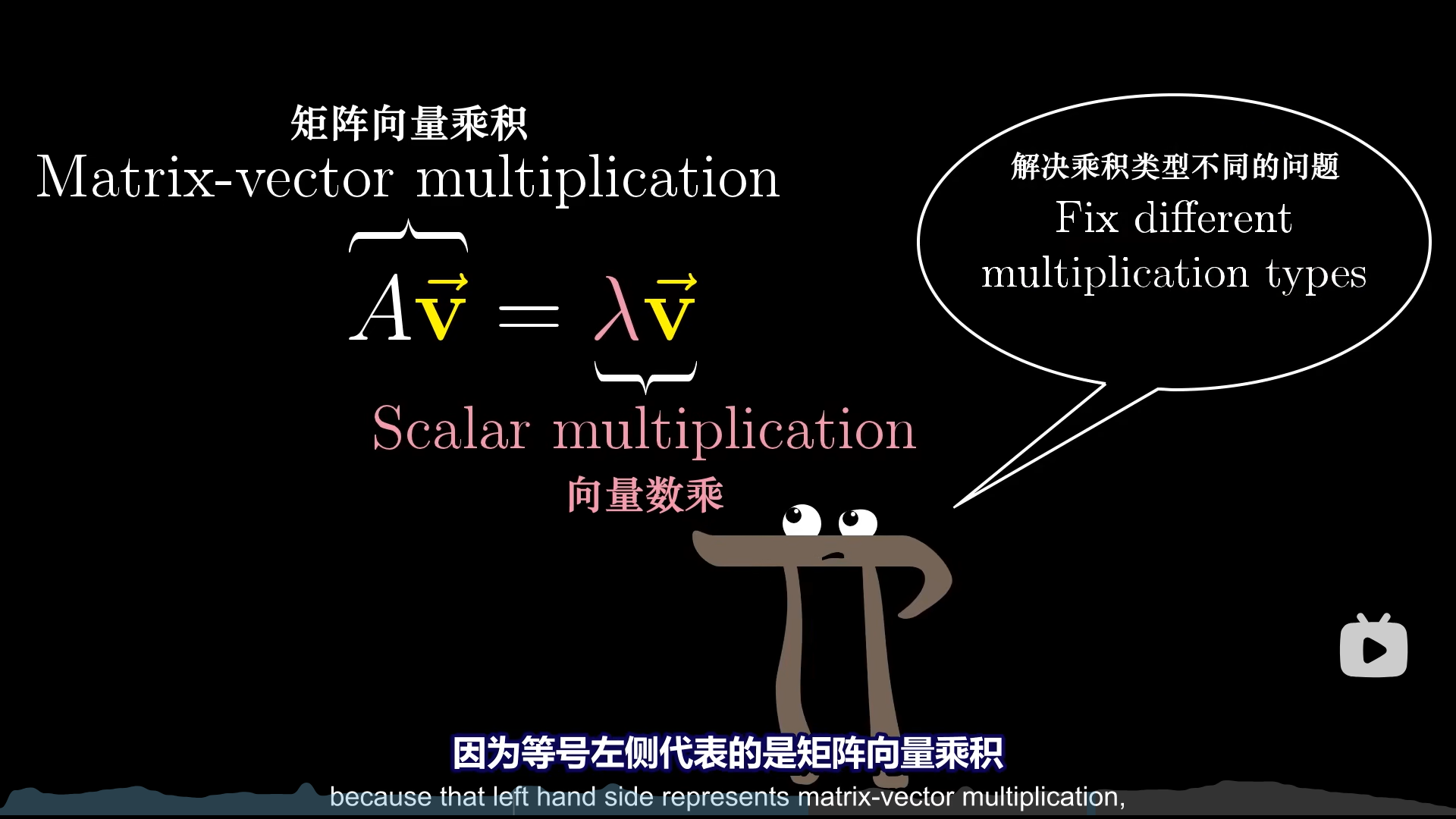
把等式变换一下,就可以得到一个线性齐次方程。要有非零解,就一定要降维,所以行列式就等于0。
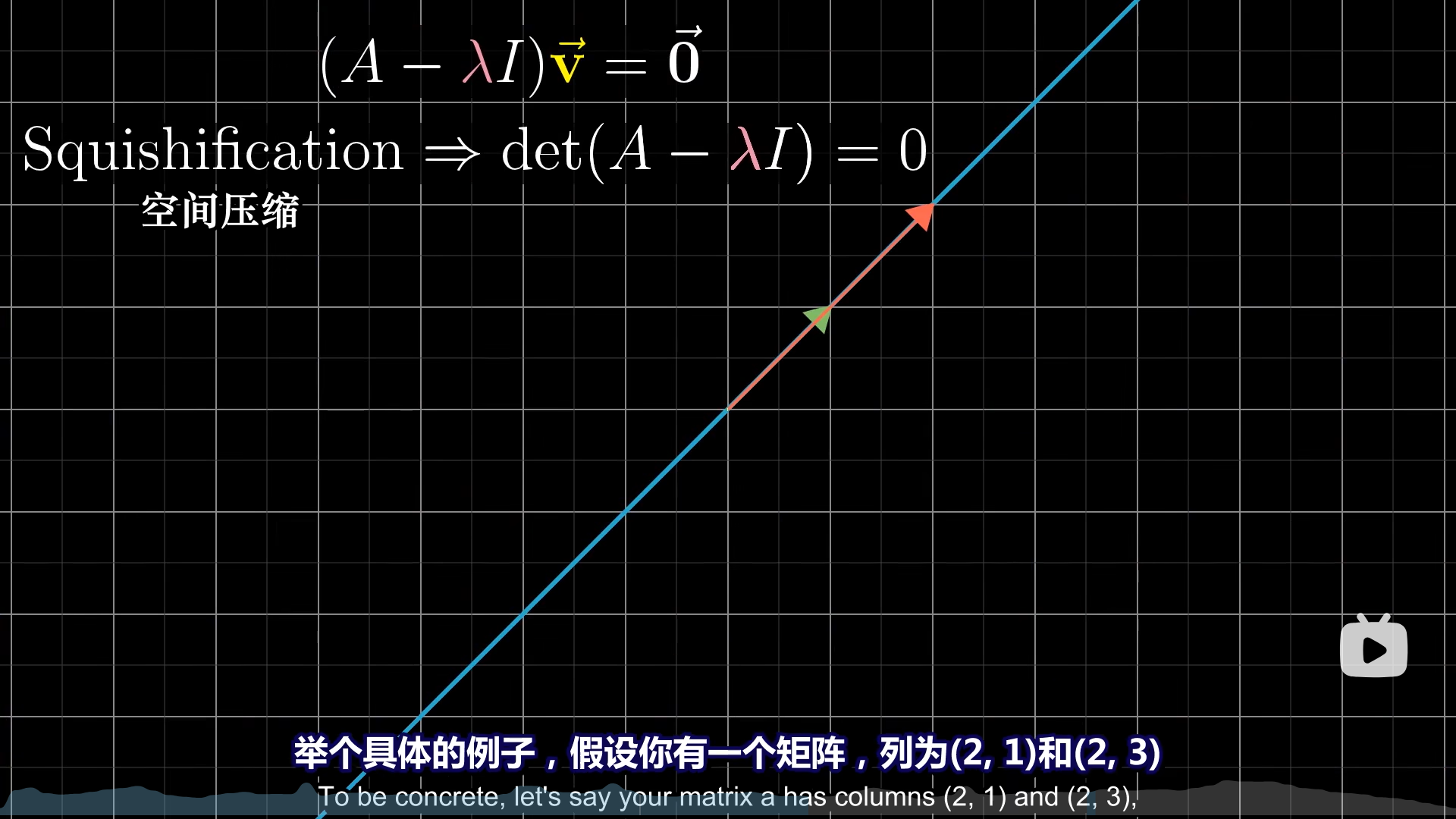
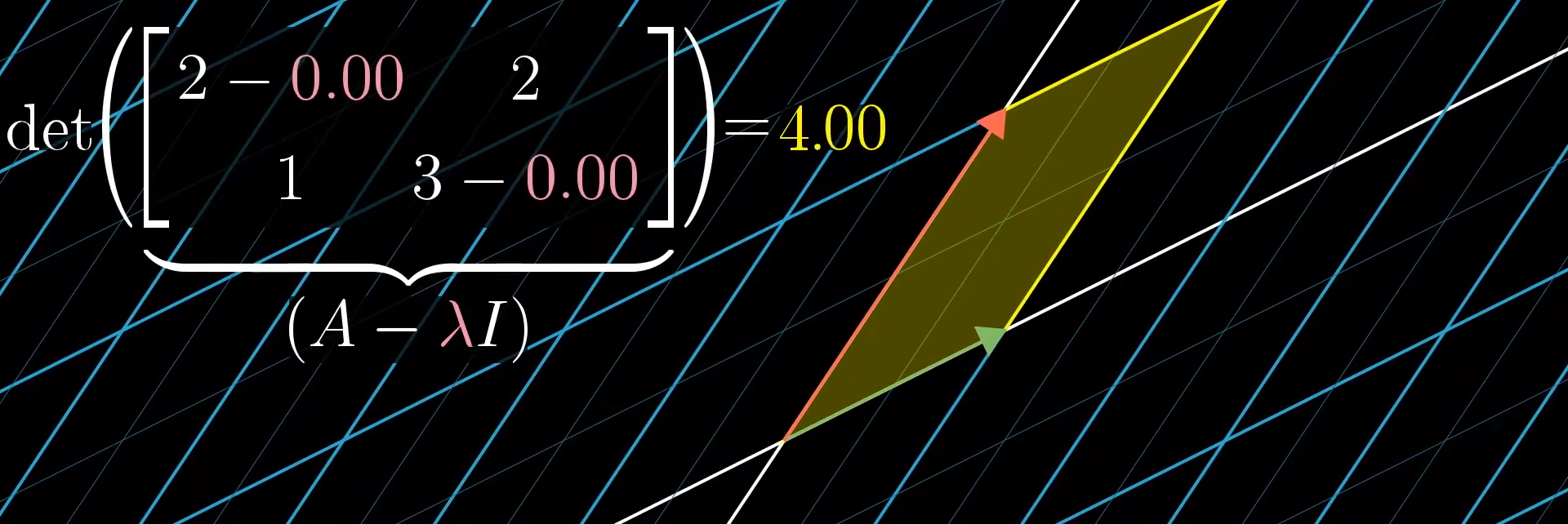
实际上,如果你把
λ
\lambda
λ看做变量,你在调整这个值的时候,行列式的几何意义(面积),也在连续变化,当这个变量使得面积=0的时候,这个变量就是特征值。当然,这并不是单调的,所以有多个零点,n阶矩阵最多有n个特征值
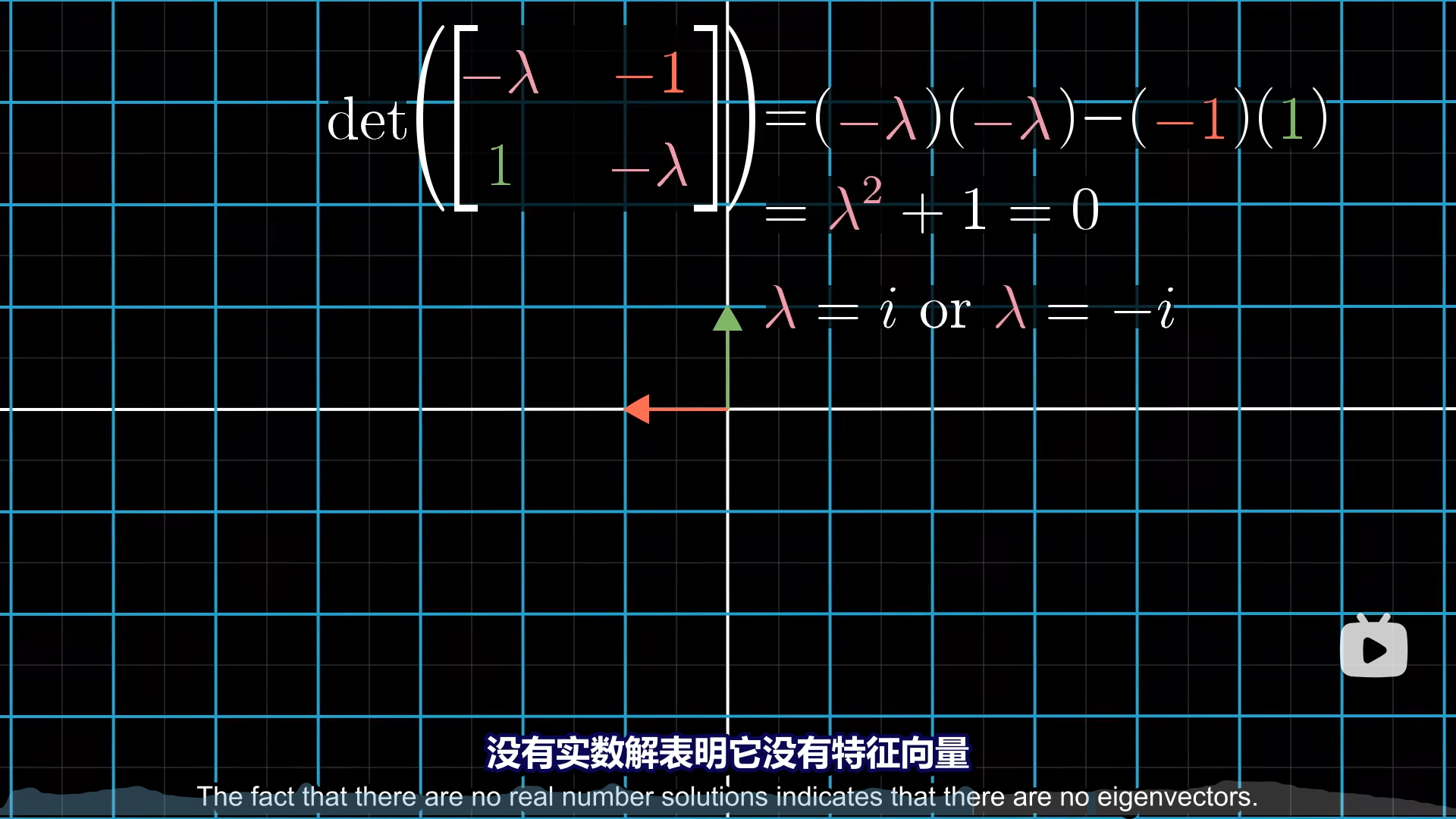
有时候,n阶矩阵的特征值小于n个(考虑重根),那就一定有一些特征值算出了虚数。比如下面这个旋转变换,压根就没特征值,所以最后算出俩虚数。
另一种特殊情况是,剪切,特征向量恰好在基向量方向上。这样的结果就是,你会丢失一个特征值,重根对应的特征向量会分布在基向量方向上。

还有一种特殊情况,就是空间整体的拉伸,你把特征值带进去以后,左边的矩阵会变成0矩阵,那么任意向量就都是特征向量了。
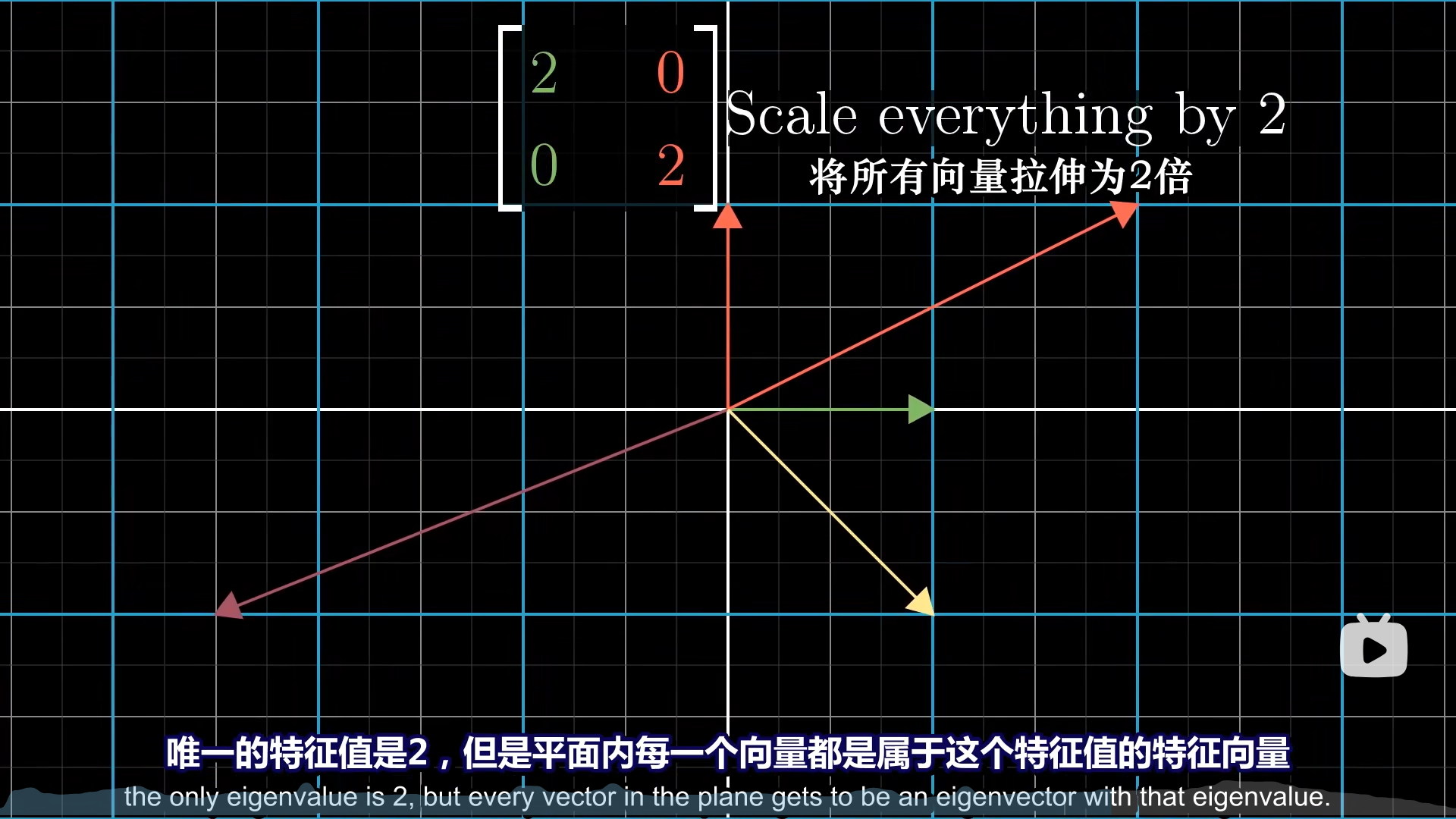
最后来说一下对角矩阵,对角矩阵的几何意义是把对应方向上的基向量放大k倍,所以n个对角矩阵相乘其实就是放大 k n k^n kn倍。
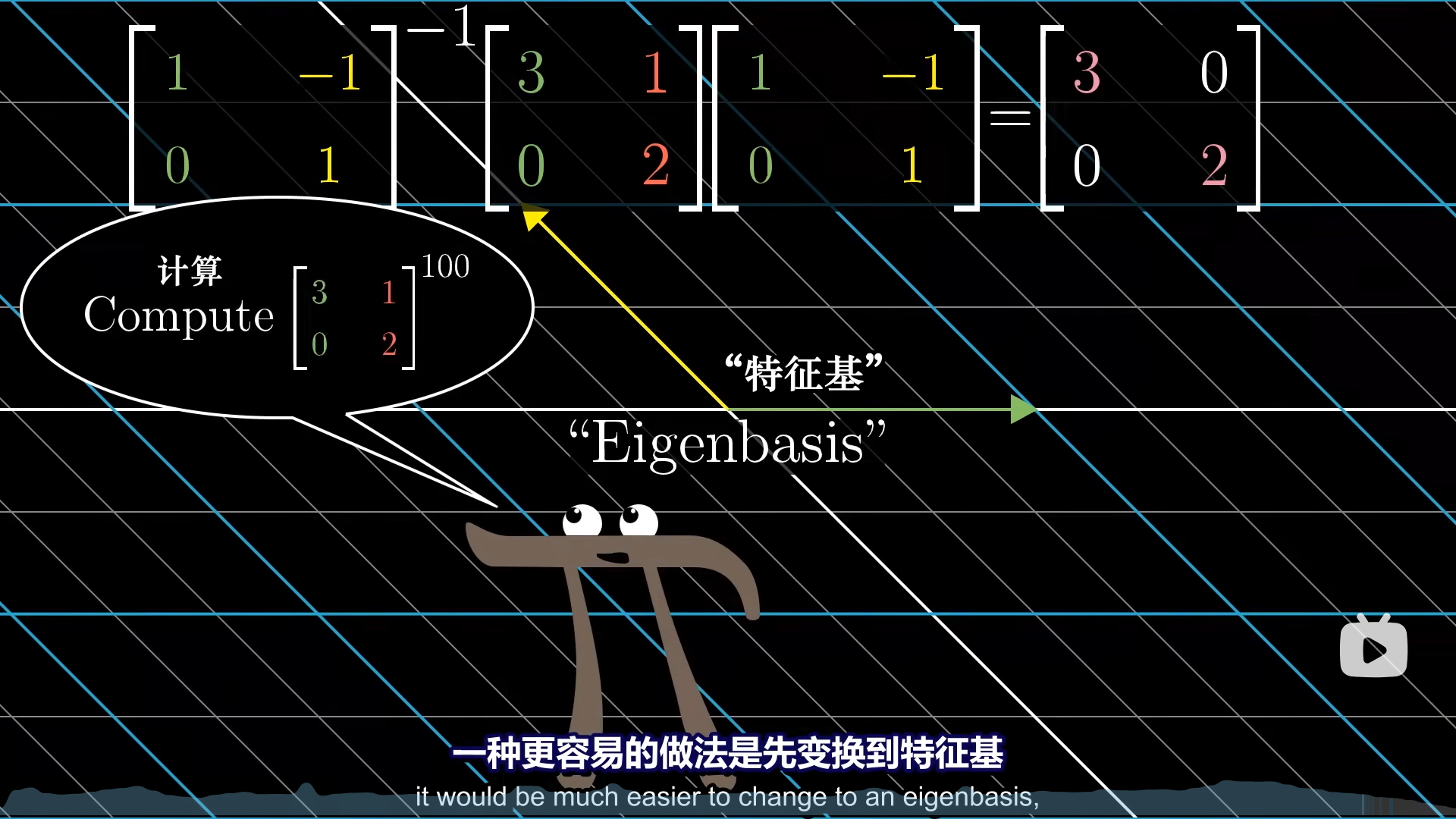
除去那些堆特殊情况,大部分情况其实是n阶矩阵有n个特征值,那么如果用这n个特征向量作为新的基底,就是所谓的“特征基”。
用这个基底有个好处,就是复杂的线性变换可以被看做是单纯的基向量放大,所有向量仅仅是伸缩,没有旋转。
那如何用现有基底,去表示特征基下的伸缩变换呢?回顾上一节的基变换,我们先把特征基变成现有基底,然后应用伸缩,再变回特征基。
至于基变换矩阵怎么求,就是把特征基对应特征值排列起来构成矩阵,这也是我们线代里的基本做法。
为什么说这个矩阵就是基变换矩阵呢?有了这个矩阵,每个在特征基空间内的基,比如(1,0,0),经过特征矩阵变换后,就可以得到ij空间内的特征向量坐标,符合基变换的特征,所以我们这么构造是合理的。
其实这就是相似对角化,而相似对角化的条件,其实就等价于你有n个特征基。
抽象向量空间
通过基变换你可以发现,线性代数中的各种运算,其实和基坐标没有什么关系,无论你选什么基底,他们的运算都具有线性性质,我们那些规则也都适用:
线性性质:
- 可加性:先加在变换=先变换再加
- 成比例:先乘再变换=先变换再乘
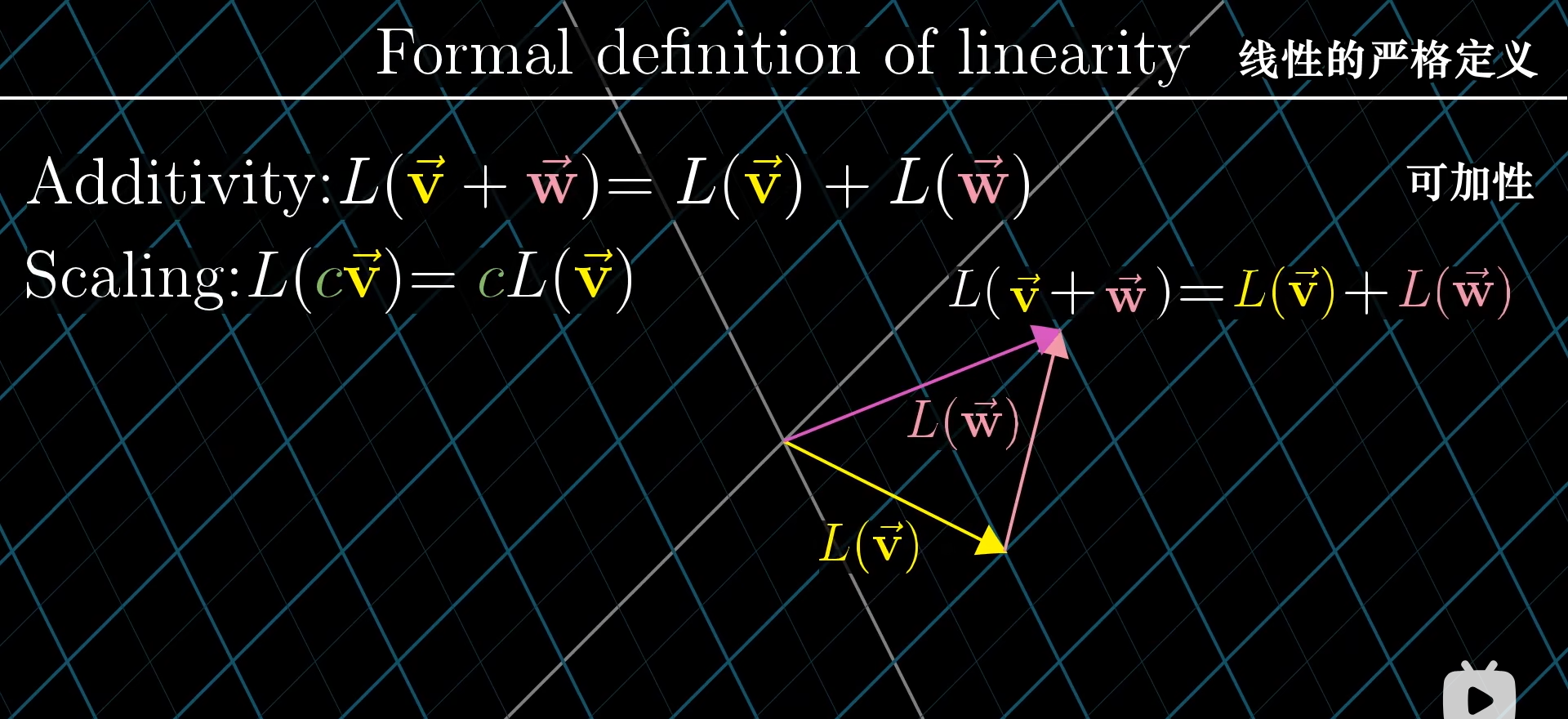
我们前面描述的,二维情况下网格线密度均匀,那只是一种特例,真正的线性性质应该是上面这两条。
实际上,无论是向量,还是函数,还是什么过程,比如求导,微分,只要你是某种转换,而且具有线性性质,那么就可以给它找一组基,写成向量的形式,就可以应用线代的公式和特性。
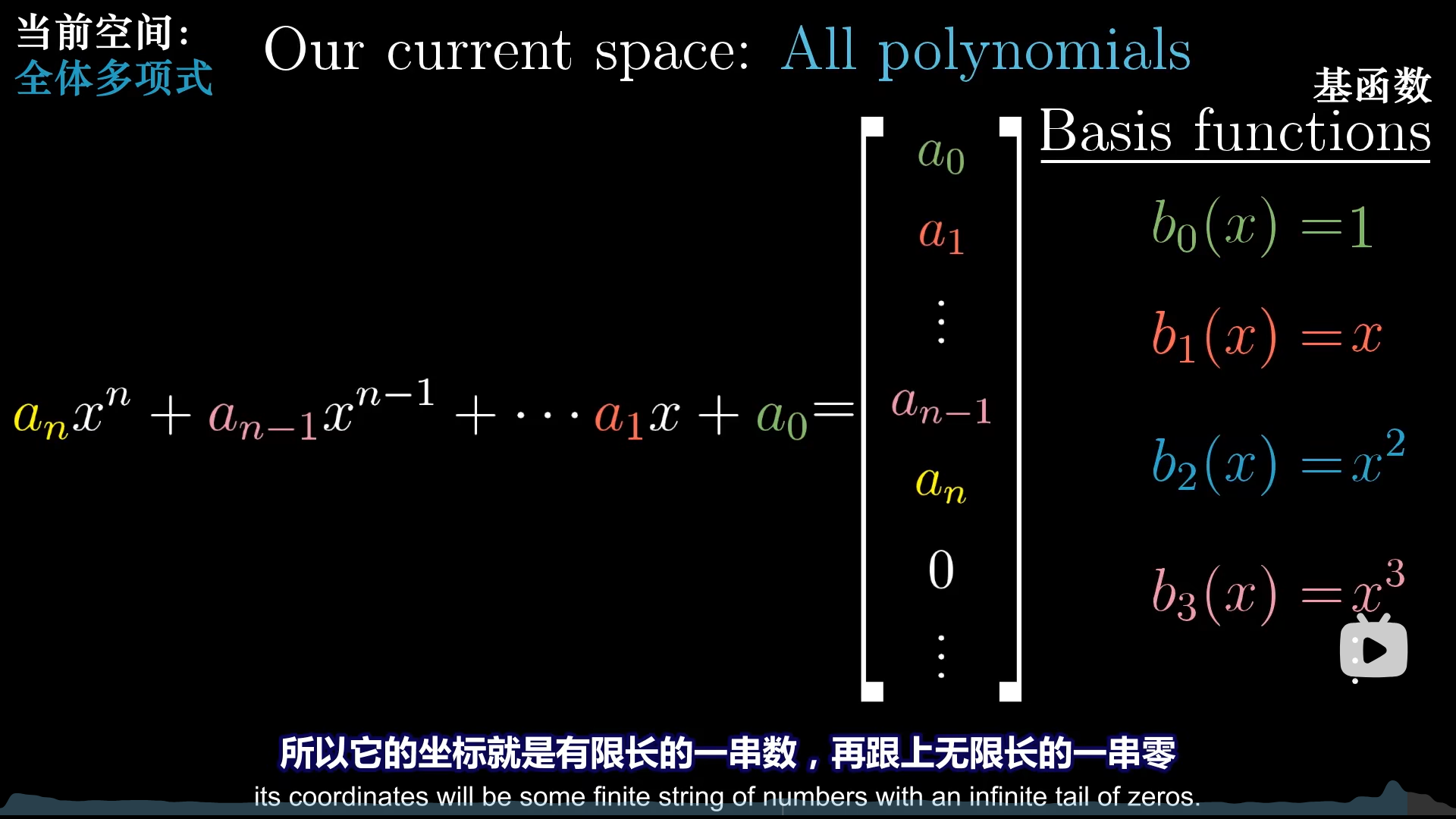
以多项式举例,选择x的不同幂为基底,则构成了一个向量空间,每个基都是一个向量,只不过我们写成一个函数。

那么给一个多项式,就可以用向量坐标表示出来其在向量空间的位置了。
求导运算是线性变换,所以可以用矩阵表示。
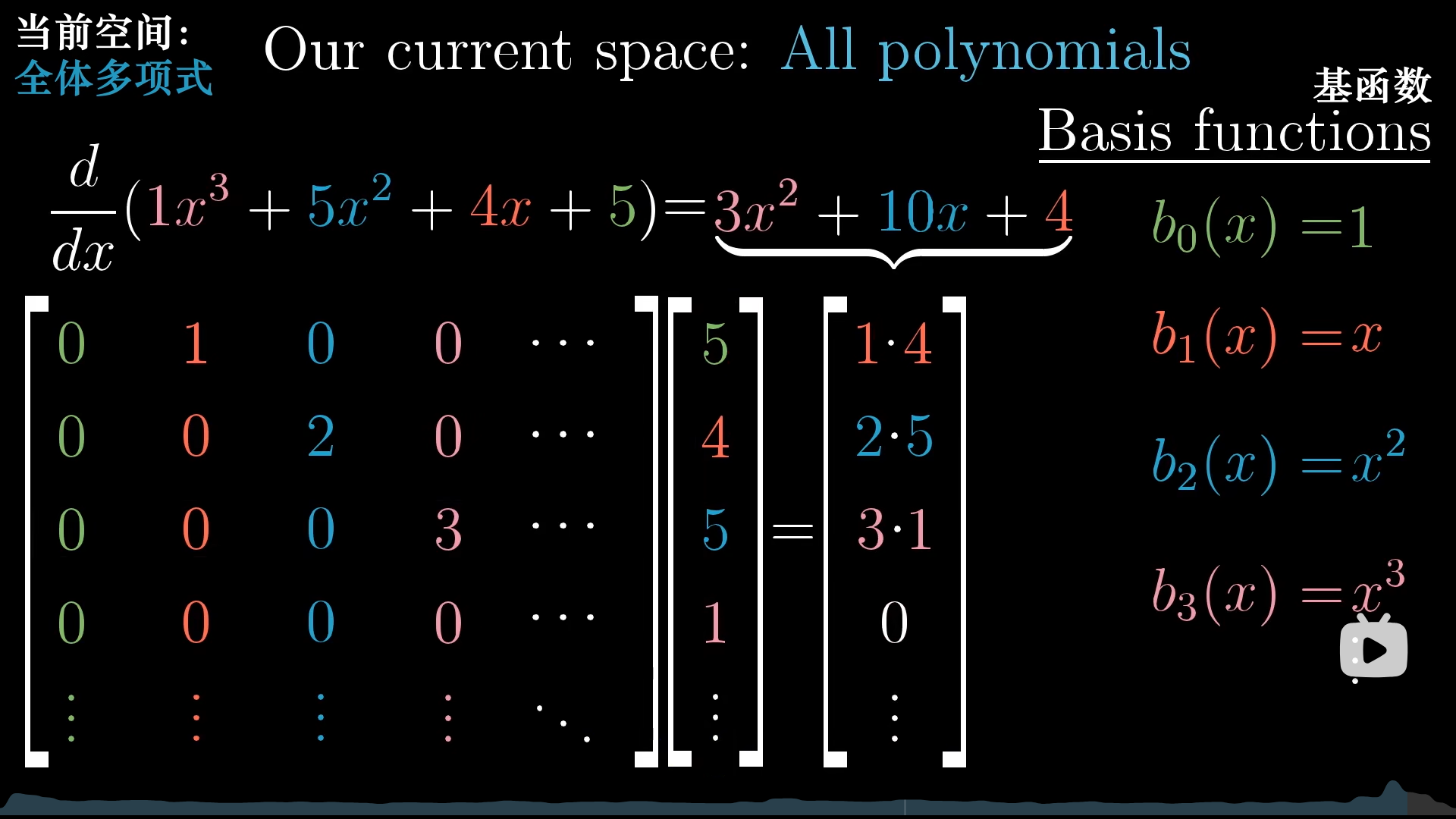
在数学中,除了求导,还有更多的东西是线性变换,凡是线性变换,都可以写成基,矩阵,向量,并且应用线代计算法则。
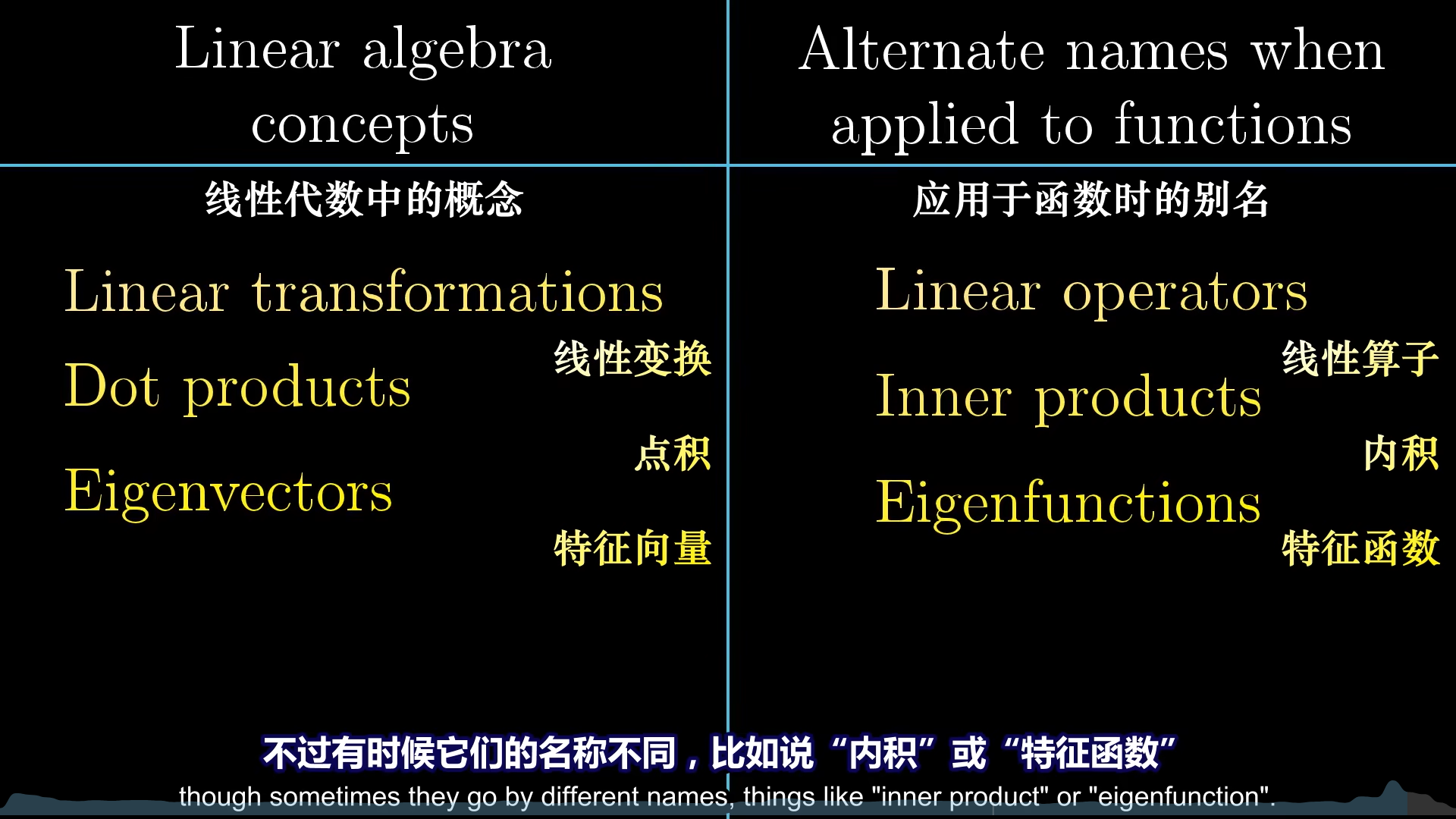
发明线代的数学家,为了把这种规则推广到各个领域,就需要建立其他领域到线代领域的桥梁,即线性空间的判定。
向量是什么形式并不重要,只要你构造的向量空间只要满足8条公理,就证明这个写法是线性的,可以应用所有线代法则。
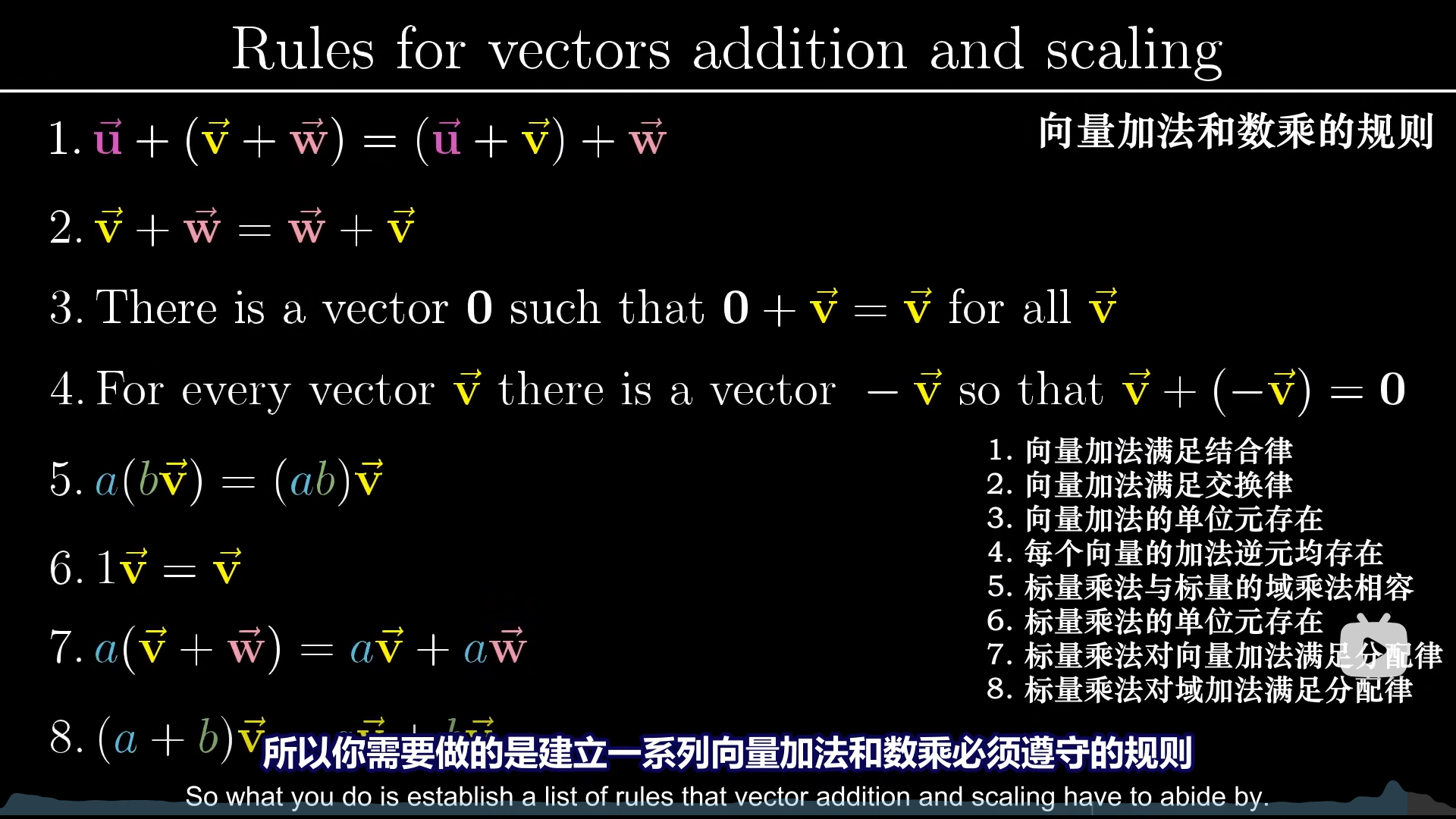
之所以我们讲的那么难,就是为了普适,但是普适的代价就是抽象,所以如果真的想学好,其实应该先从具象入手,然后推广到抽象,只是这样就费时间了,所以很矛盾,但是我仍然建议两者互为补充。















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











