







 本文为3B1B视频课程《线性代数的本质》笔记精华,涵盖向量、线性变换、矩阵运算等核心概念及应用。通过直观视角解析复杂理论,帮助读者深入理解线性代数。
本文为3B1B视频课程《线性代数的本质》笔记精华,涵盖向量、线性变换、矩阵运算等核心概念及应用。通过直观视角解析复杂理论,帮助读者深入理解线性代数。
本文是3B1B视频课程《线性代数的本质》全内容笔记。
章节名
1. 向量vector
- 向量是什么
- 物理视角:箭头 (长度和方向决定一个向量)
- 计算机视角:有序数字列表
- 数学视角:可以进行相加或数乘的一切
- (直观视角:各方向运动的合成/对某一方向的运动)
- 在线性代数中,向量常常以原点作为起点
- 列表视角与箭头视角的关联:通过向量坐标(每个值是沿着对应轴走多远)
- 向量相加:三角形定理
- 运动视角:进行两个向量的运动
- 数字视角:加和各坐标系值
- 数乘:数字(标量scalar)的作用是缩放(scale)向量
- 向量整体缩放,相当于分量缩放(对以列表视角看向量相当于每个数被乘)
2. 线性组合、线性生成空间与基
-
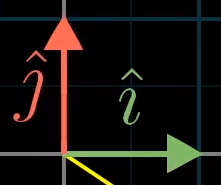
基向量,坐标系的基
向量坐标,可以视作:用各数字分别缩放基向量,再将其缩放后的向量相加:
a i → + b j → a\overrightarrow{i}+b\overrightarrow{j} ai+bj
事实上,我们可以选择别的基,构成另一种坐标系 -
标量与向量乘积之和的结果,被称为这些向量的线性组合: a v → + b w → a\overrightarrow{v}+b\overrightarrow{w} av+bw
所有结果组成一个集合,这个集合给称为这些向量的张成空间span
在二维平面,就是全部的线组成平面/还是一根线 -
在一组向量中,至少有一个是多余的,没有对张成空间做出任何贡献
or
移除一个向量,不影响生成空间
⇒ \Rightarrow ⇒线性相关 or 其中一个向量可以被表示为其他向量的线性组合,因为这个向量已经落在其他向量张成的空间之中
反之则为线性无关
使所有向量地位平等的定义法:

-
空间的一组基:张成该空间的一个线性无关向量的集合
3. 矩阵与线性变换
- 线性代数中,变换是一个向量变化为另一个向量的函数
线性变换- 直线在变换后仍然保持为直线,且原点固定
- “保持网格线平行并等距分布”的变换
- 如何数学地描述空间上所有向量的线性变换:
- 记录
i
^
\widehat{i}
i
和
j
^
\widehat{j}
j
的变化
向量变化前后是基向量的同一个线性组合
缩放基向量后再用这个线性组合计算向量:
[ a b c d ] ⋅ [ x y ] = x [ a c ] + y [ b d ] = [ a x + b y c x + d y ] \begin{bmatrix} a & b \\ c & d \end{bmatrix}\cdot \begin{bmatrix} x \\ y \end{bmatrix}=x\begin{bmatrix} a \\ c \end{bmatrix}+ y\begin{bmatrix} b \\ d \end{bmatrix}=\begin{bmatrix} ax+by \\ cx+dy \end{bmatrix} [acbd]⋅[xy]=x[ac]+y[bd]=[ax+bycx+dy]
[ a b c d ] \begin{bmatrix} a & b \\ c & d \end{bmatrix} [acbd]是基向量变换后的坐标(第一列是第一个基向量)
[ x y ] \begin{bmatrix} x \\ y \end{bmatrix} [xy]是原坐标系中的向量 - 剪切shear [ 1 1 0 1 ] \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix} [1011]
- 变换:也有列向量之间线性相关这种情况
- 若一个变换L满足以下两条性质:
L ( v → + w ‾ ) = L ( v → ) + L ( w → ) ( 1 ) 可加性 L ( c v ‾ ) = c L ( v → ) ( 2 ) 成比例(一阶齐次) \begin{aligned} L\left( \overrightarrow{v}+\overline{w}\right) &=L\left( \overrightarrow{v}\right)+L\left( \overrightarrow{w}\right) &&(1)可加性\\ L\left( c\overline{v}\right) &=cL\left( \overrightarrow{v}\right) &&(2)成比例(一阶齐次)\\ \end{aligned} L(v+w)L(cv)=L(v)+L(w)=cL(v)(1)可加性(2)成比例(一阶齐次)
则称L是线性的
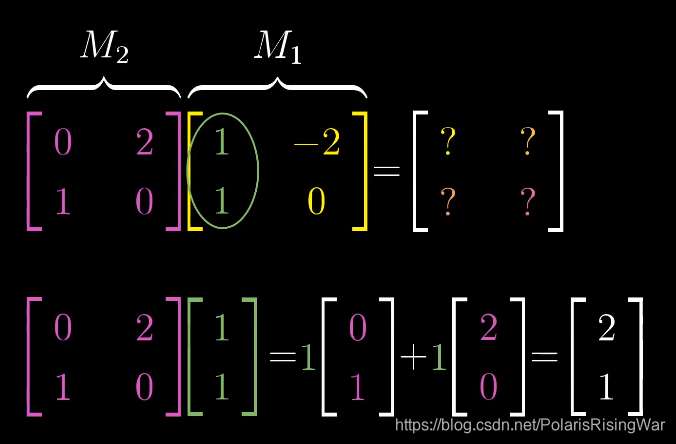
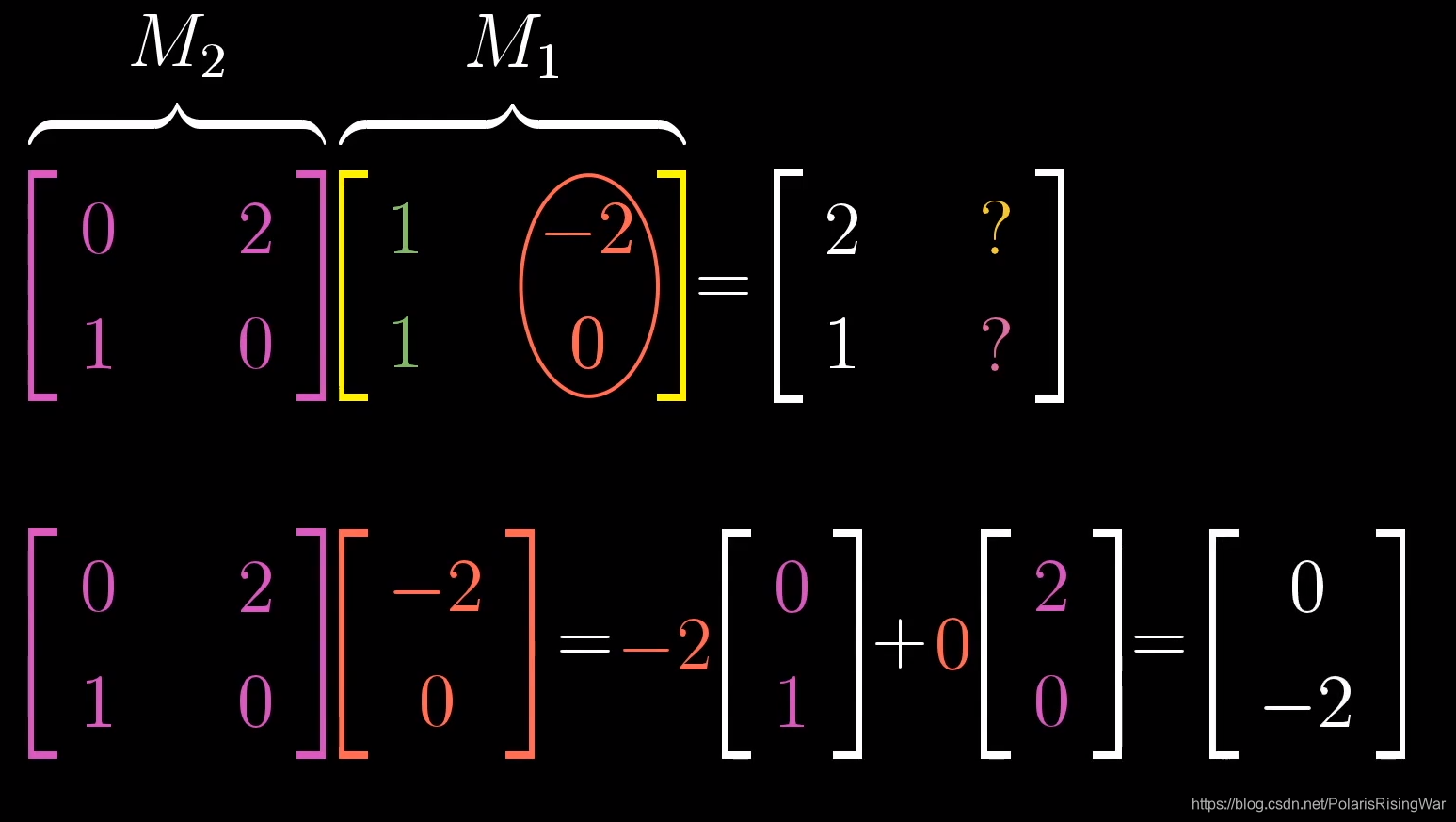
4. 矩阵乘法与线性变换复合
-
两个独立变换的“复合变换”:先变换一次,再变换一次
↓
乘积
需要从右向左读:先应用右边矩阵表示的变换,再应用左边的变换
一个矩阵,一个交换 -
依然可以视作基向量的变换:
-
不能交换,可以结合
-
附注:三维线性变换
i → \overrightarrow{i} i j → \overrightarrow{j} j k → \overrightarrow{k} k
[ . . . . . . . . . ] \begin{bmatrix} . & . & . \\ . & . & . \\ . & . & . \end{bmatrix} .........
5. 行列式determinant
-
行列式,用于测量矩阵(变换)扩大/挤压的程度 ⇒ \Rightarrow ⇒测量一个给定区域面积增大或减小的比例
可以用原空间的一个 (1,1) 小格子来进行直观理解 -
行列式为0,代表这个矩阵(变换)将空间压缩到更小的维度上 (列的线性相关)
-
翻转平面,orientation of space转变了:行列式为负
-
三维行列式:变换形成的平行六面体的体积
空间方向:右手定则(如果变换后需要用左手,行列式为负) -
行列式计算公式:
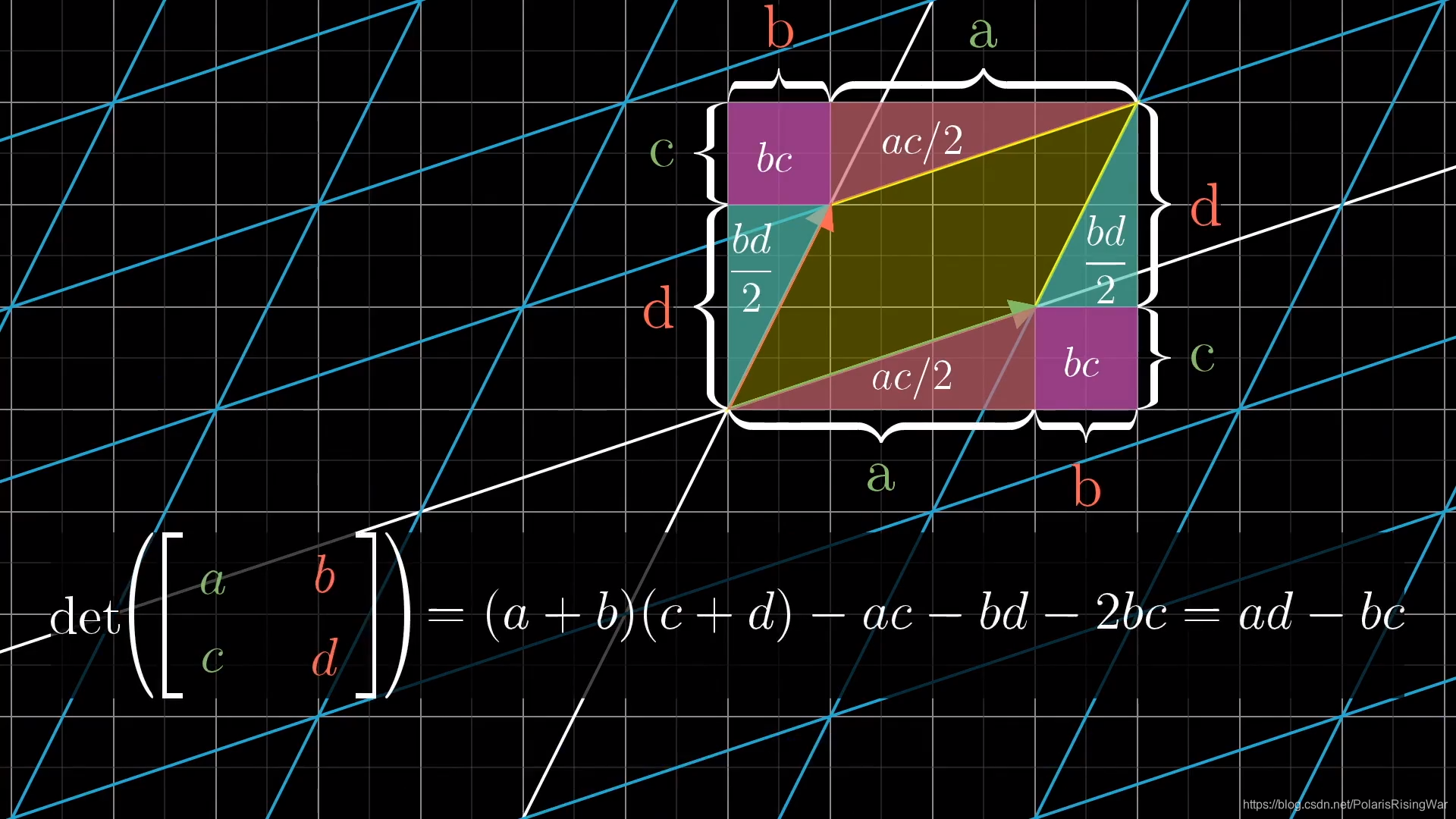
-
d e t ( M 1 M 2 ) = d e t ( M 1 ) ⋅ d e t ( M 2 ) det(M_{1}M_{2})=det(M_{1})\cdot det(M_{2}) det(M1M2)=det(M1)⋅det(M2)
6. 逆矩阵、列空间与零空间、秩
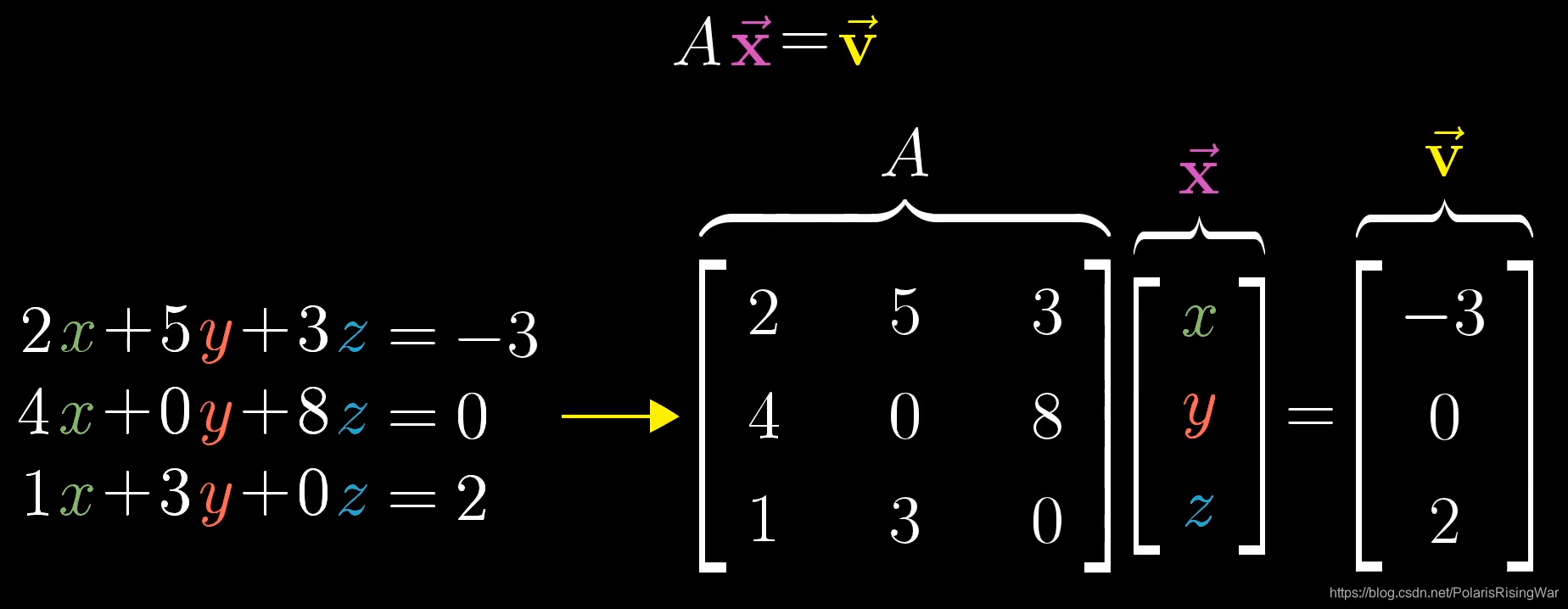
- 线性方程组
系数矩阵A
- 逆矩阵
如果变换没有将空间降维,那么v总是有一个x能与之对应。计算方法是使 A x → = v → A\overrightarrow{x}=\overrightarrow{v} Ax=v此式左乘 A − 1 A^{-1} A−1
直觉理解:用一个逆变换(逆矩阵)复原变换
即 A − 1 A = I A^{-1}A=I A−1A=I 是一个恒等变换(什么都不做) - d e t ( a ) ≠ 0 ⇒ A − 1 det(a)\neq0\Rightarrow A^{-1} det(a)=0⇒A−1存在
- d e t ( a ) = 0 ⇒ det(a)=0\Rightarrow det(a)=0⇒在经过这个变换压缩后,没法通过线性变换升维(用一个逆矩阵复原),也就是不存在 A − 1 A^{-1} A−1(如果 v → \overrightarrow{v} v在这个低维空间上,方程组就有解,不在就无解)
- 有些行列式为0的矩阵变换将空间压缩得更狠(有些压成线,更狠的压成点)
秩:衡量压缩程度- 变换后空间的维数(压缩程度)
- 列空间的维数
- A的列空间
- 所有可能的输出向量 A v → A\overrightarrow{v} Av构成的集合
- 矩阵的列所张成的空间
- 零向量一定会被包含在列空间中
- 它可以告诉我们什么时候存在解
- 满秩
- 矩阵的零空间或核:在变换后落在原点的向量集合
- 原视频未提到计算方面内容,建议搜索相应关键词学习:高斯消元法、行阶梯型
- 附注2:非方阵:可看作是输入输出维数不同的线性变换
和方阵的一样,每列向量是基向量变换后的坐标
7. 点积与对偶性
- 点积
- 观点1:向量对应位元素相乘,对其求和
- 观点2:长度×正交投影长度
如果两个向量垂直,点积:0
点积与顺序无关的直觉解释:如果两个向量等长,那么按照对称性,两个投影应该也一样长,两个投影-长度乘积互为镜像;如果两个向量不等长,可以将其想象为两个等长向量中的一个按比例伸缩,对面投影到这个上面的长度又不变,这个投影到对面的长度按比例伸缩,所以最后乘起来还是一样的
- 对偶性:两种数学事物之间自然而又出乎意料的对应关系
解释点积两种观点的统一性 - (类似于6的附注2)
多维空间到一维空间(数轴)的线性变换
一个长这样的一维横向量:[ . . ]→矩阵向量乘法(点积)
(1个从向量到数的映射) - 将二维向量投影到一条线上的函数:一个线性变换
是点积的观点2
这个线性变换的矩阵是该线上的单位向量 v → \overrightarrow{v} v的x,y坐标构成的(1,2)矩阵(证明方式:对称性)
(所以对单位向量来说,很显然其点积的观点1、2是一致的)(而非单位向量,和1中2的直觉理解逻辑一样,对其进行对应的缩放就行)
也就是点积的观点1
应用这个变换 = 和这个 v → \overrightarrow{v} v做点积
8. 叉积
-
v
→
×
w
→
=
向量平行四边形的面积(行列式)
\overrightarrow{v}\times\overrightarrow{w}=向量平行四边形的面积(行列式)
v×w=向量平行四边形的面积(行列式)
方向:符合基向量方向的叉积结果(指顺 i ^ × j ^ \widehat{i}\times\widehat{j} i ×j 的方向)为正
右手法则,指向纸外的方向为正
注意:将向量写成矩阵的行和写成矩阵的列,都是一样的,因为转置不影响行列式的值
一个矩阵(变换)的行列式,变换后面积扭曲的程度 - 真正的叉积:一个新向量,垂直于向量平行四边形
长度是其值
方向判定:右手法则(食指 v → \overrightarrow{v} v,中指 w → \overrightarrow{w} w)(对我来说是直接抱圆了,一样的) - [ v 1 v 2 v 3 ] × [ ω 1 ω 2 ω 3 ] = det ( [ i ^ v 1 ω 1 j ^ v 2 ω 2 k ^ v 2 ω 3 ] ) = i ^ ( v 2 ω 3 − v 3 ω 2 ) + j ^ ( v 3 ω 1 − v 1 ω 3 ) + k ^ ( v 1 ω 2 − v 2 ω 1 ) \begin{aligned} \begin{bmatrix} v_{1} \\ v_{2} \\ v_{3} \end{bmatrix}\times\begin{bmatrix} \omega _{1} \\ \omega _{2} \\ \omega _{3} \end{bmatrix} &=\det \left( \begin{bmatrix} \widehat{i} & v_{1} & \omega_{1} \\ \widehat{j} & v_{2} & \omega_{2} \\ \widehat{k} & v_{2} & \omega_{3} \end{bmatrix}\right) \\ &=\widehat{i}\left( v_{2}\omega_{3}-v_{3}\omega_{2}\right) + \widehat{j}\left( v_{3}\omega_{1}-v_{1}\omega_{3}\right) + \widehat{k}\left( v_{1}\omega_{2}-v_{2}\omega_{1}\right) \end{aligned} v1v2v3 × ω1ω2ω3 =det i j k v1v2v2ω1ω2ω3 =i (v2ω3−v3ω2)+j (v3ω1−v1ω3)+k (v1ω2−v2ω1)
- 以线性变换的眼光看叉积:
对偶性:一个(从空间)到数轴的线性变换(变换矩阵为[ . . ]) → \rightarrow →这个变换的对偶向量 [ . . . ] \begin{bmatrix} . \\ . \\ . \end{bmatrix} ...
应用线性变换 ⟺ \iff ⟺与这个向量做点积
根据 v → \overrightarrow{v} v和 w → \overrightarrow{w} w定义一个三维到一维的线性变换 ⇒ \Rightarrow ⇒找到它的对偶向量 ⇒ \Rightarrow ⇒说明其就是 v → × w → \overrightarrow{v}\times\overrightarrow{w} v×w
f ( [ x y z ] ) = det ( [ x v 1 ω 1 y v 2 ω 2 z v 3 ω 3 ] ) f\left( \begin{bmatrix} x \\ y \\ z \end{bmatrix}\right) =\det \left( \begin{bmatrix} x & v_{1} & \omega_{1} \\ y & v_{2} & \omega_{2} \\ z & v_{3} & \omega_{3} \end{bmatrix}\right) f xyz =det xyzv1v2v3ω1ω2ω3 一个线性变换
其中 det ( [ x v 1 ω 1 y v 2 ω 2 z v 3 ω 3 ] ) \det \left( \begin{bmatrix} x & v_{1} & \omega_{1} \\ y & v_{2} & \omega_{2} \\ z & v_{3} & \omega_{3} \end{bmatrix}\right) det xyzv1v2v3ω1ω2ω3 是这三个向量构成的平行六面体的体积
这是一个线性变换
f是 [ … ] [ x y z ] → [ . . . ] . [ x y z ] \left[ \ldots \right] \begin{bmatrix} x \\ y \\ z \end{bmatrix}\rightarrow \begin{bmatrix} . \\ . \\ . \end{bmatrix} .\begin{bmatrix} x\\ y\\ z\end{bmatrix} […] xyz → ... . xyz
[ . . . ] \begin{bmatrix} . \\ . \\ . \end{bmatrix} ... 是p
p ⇒ { p 1 = v 2 w 3 − v 3 w 2 p 2 = v 3 w 1 − v 1 w 3 p 3 = v 1 w 2 − v 2 w 1 \Rightarrow \begin{cases}p_{1}=v_{2}w_{3}-v_{3}w_{2}\\ p_{2}=v_{3}w_{1}-v_{1}w_{3}\\ p_{3}=v_{1}w_{2}-v_{2}w_{1}\end{cases} ⇒⎩ ⎨ ⎧p1=v2w3−v3w2p2=v3w1−v1w3p3=v1w2−v2w1- 在计算上:右边那个行列式最后算出来就是这样的
- 在几何上:平行四边形的面积 × ( x , y , z ) \times(x,y,z) ×(x,y,z)在垂直于 v → \overrightarrow{v} v和 w → \overrightarrow{w} w方向上的分量=垂直于 v → \overrightarrow{v} v和 w → \overrightarrow{w} w且长度为平行四边形的面积的向量 ⋅ [ x y z ] \cdot\begin{bmatrix} x \\ y\\ z \end{bmatrix} ⋅ xyz (注意点乘是投影 × \times ×原长,投影过去就是平行六面体的高,原长(p)是平行四边形的面积)
9. 基变换
-
将向量坐标看作拉伸或压缩向量的标量
第一个元素缩放 i ^ \widehat{i} i ,第二个缩放 j ^ \widehat{j} j …etc. 压缩后基和即为所求向量 -
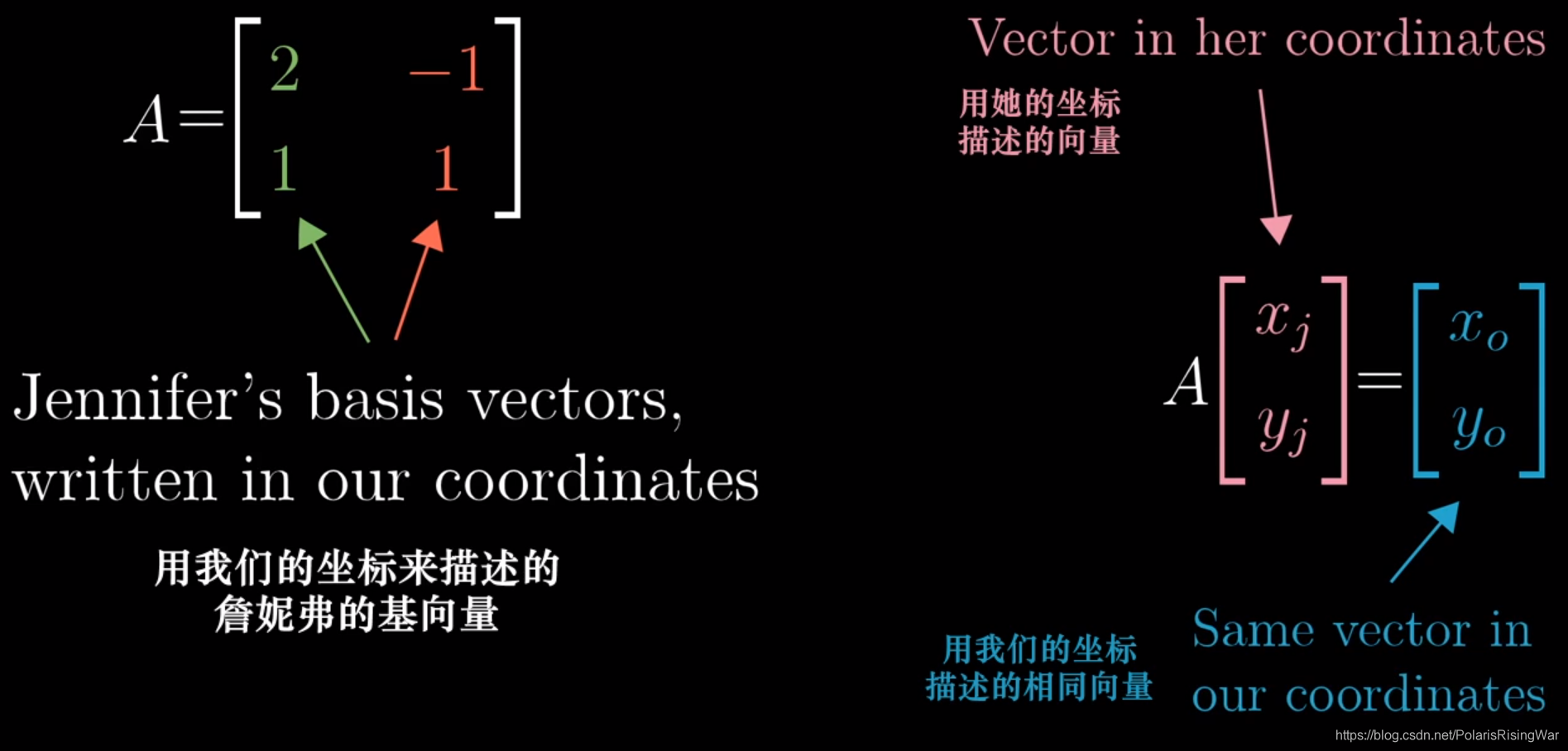
原点一定,对基的选择不同,导致得到的坐标系会不同
标准坐标系 -
转换:矩阵(基)向量乘法
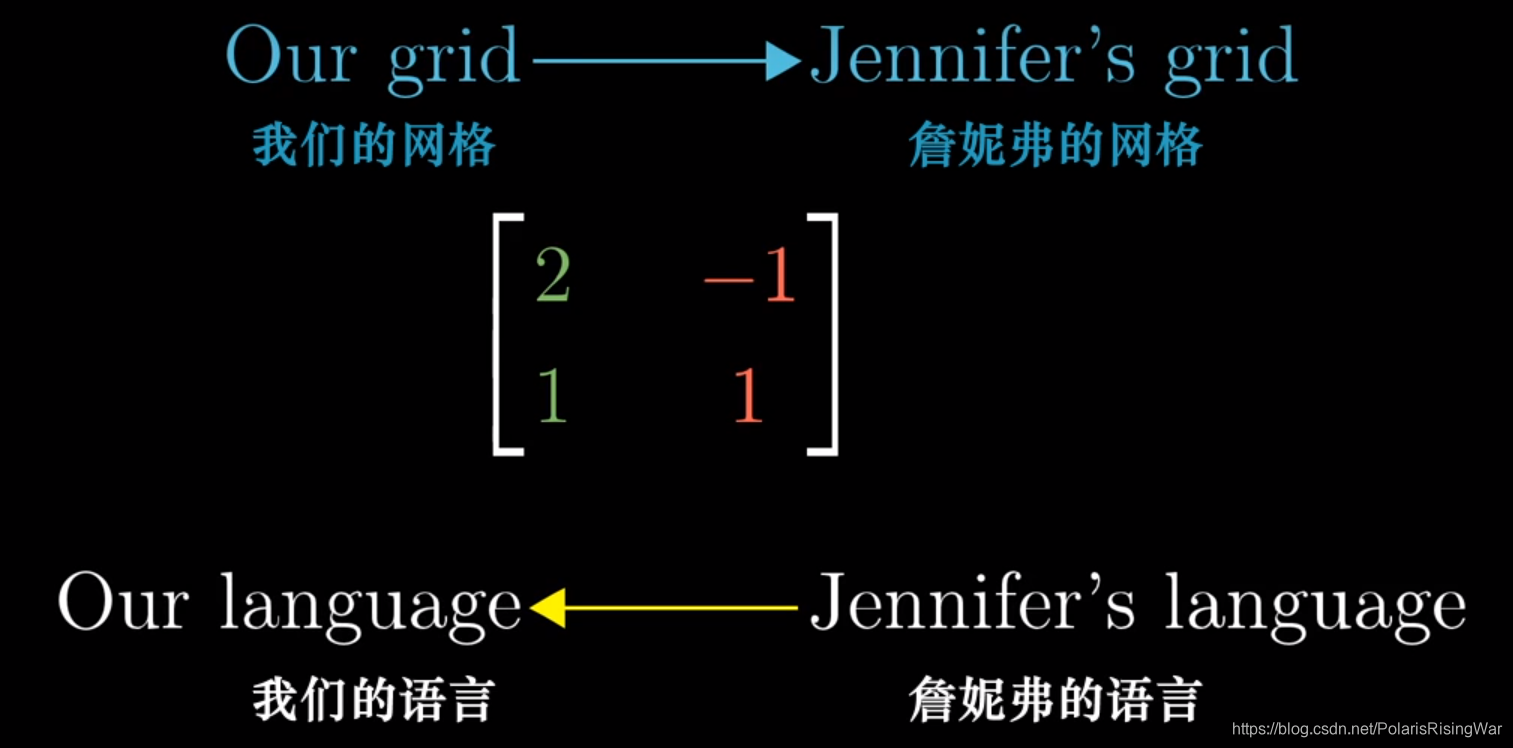
逆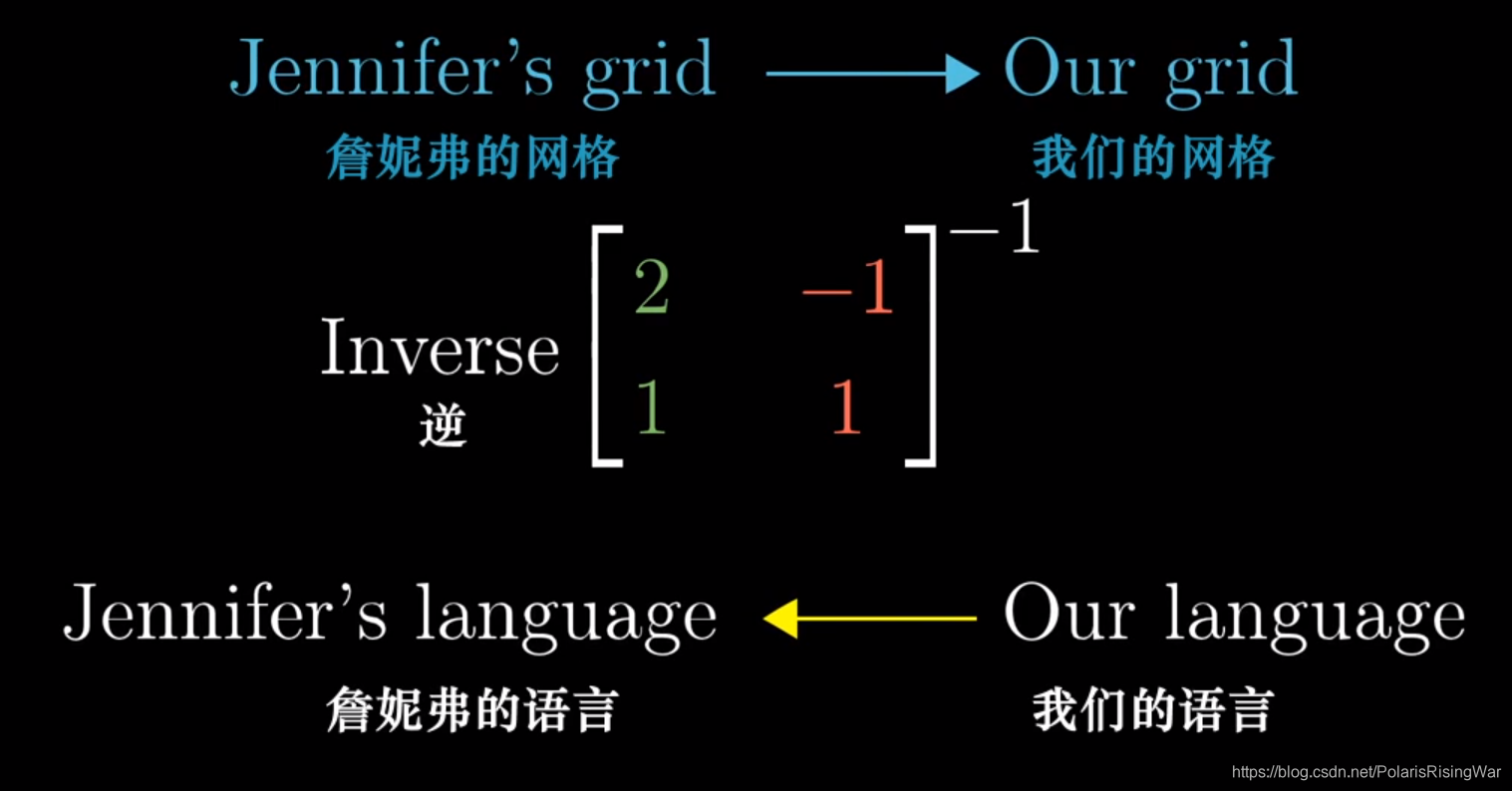
-
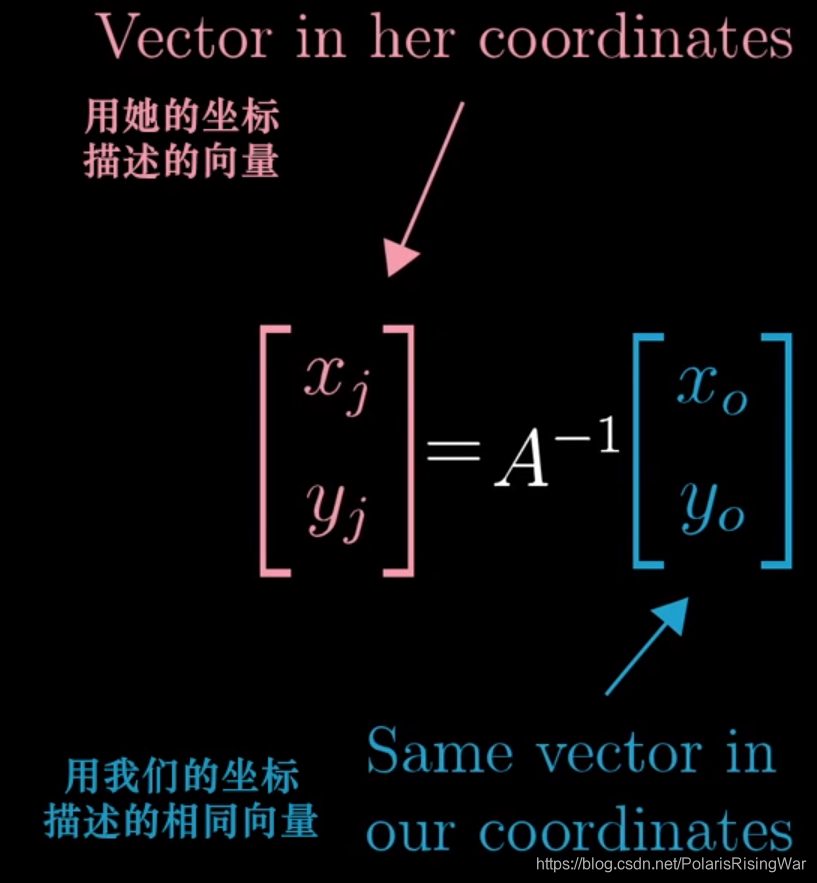
基变换→线性变换→基变换的逆
A − 1 M A A^{-1}MA A−1MA暗示着一种数学上的转移作用
这是一个跟M一样的变换,但是以另一种视角(基向量)来看的(在基变换后的坐标系上做变换,然后转到标准坐标系上)
10. 特征向量与特征值
- 在线性变换中,大部分向量离开了它生成的空间
- 线性变换的特征向量则仍留在它所张成的空间里
矩阵对它仅作拉伸或压缩(就像一个标量:特征值衡量比例的因子)
线性性质:特征向量张成空间内所有向量都会这样 - 旋转轴(特征值为1)(三维空间的特征向量)
我们过去对线性变换的描述过多依赖于特定的空间坐标系了(基坐标的变换),用特征向量和特征值其实能更好地理解线性变换 - 计算方式:
A v → = λ v → = ( λ I ) v → A\overrightarrow{v}=\lambda\overrightarrow{v}=(\lambda I)\overrightarrow{v} Av=λv=(λI)v
( A − λ I ) v → = 0 → (A-\lambda I)\overrightarrow{v}=\overrightarrow{0} (A−λI)v=0 ①
如果 v → = 0 \overrightarrow{v}=0 v=0的话上式永远成立。但是我们主要要找一个非零特征向量
情况就是: d e t ( A − λ I ) = 0 ⇐ det(A-\lambda I)=0\Leftarrow det(A−λI)=0⇐这是一个空间压缩
这样算出特征值后就能代入①式求出特征向量 - 有的线性变换没有特征向量
有的线性变换的一个特征值对应多个特征向量(可以不在一条直线上) - 特征基
基向量就是特征向量
对角矩阵:每列是特征向量,对角上的元素是特征值
(用对角矩阵多次左乘向量,会很好计算)
选择能张成全空间的特征向量,用特征向量作基(基变换)A
A − 1 M A A^{-1}MA A−1MA M:原始的变换 特征基视角下的变换
线性变换得到的结果:是对角,且对角元为对应的特征值(它所处的坐标系里的基向量只做了缩放)
有的线性变换做不了这件事,它们的特征向量不够
用处:矩阵幂次计算
11. 抽象向量空间
- 有向量性质的东西
- 函数
- 函数相加是逐自变量相加,向量相加是逐元素相加
- 数乘
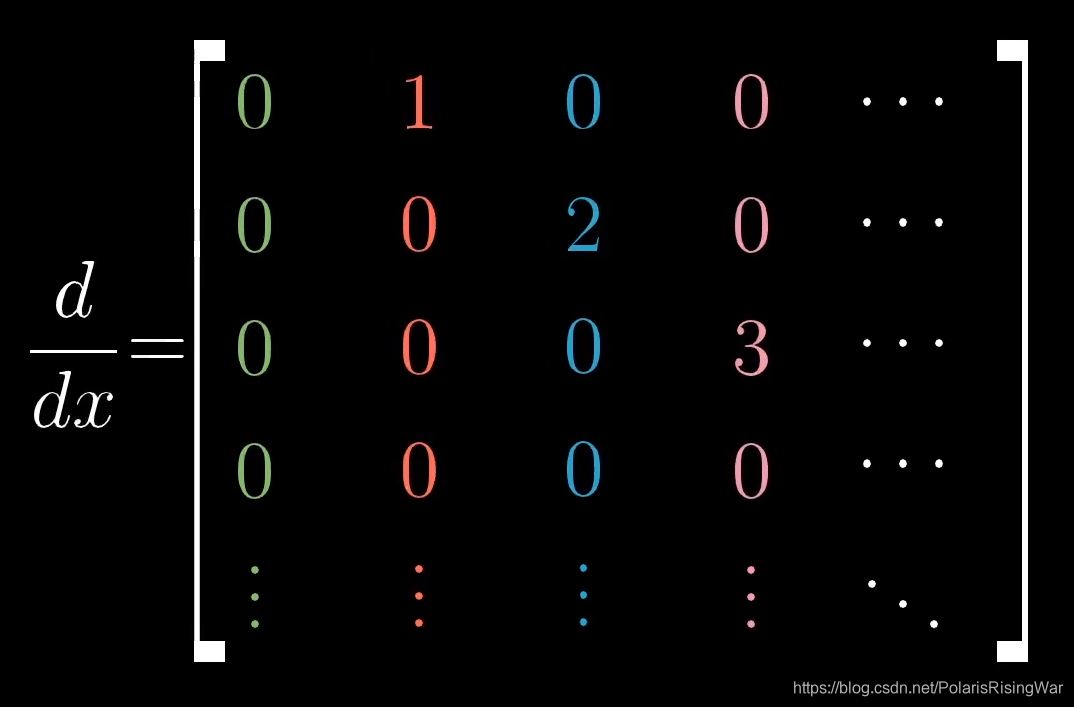
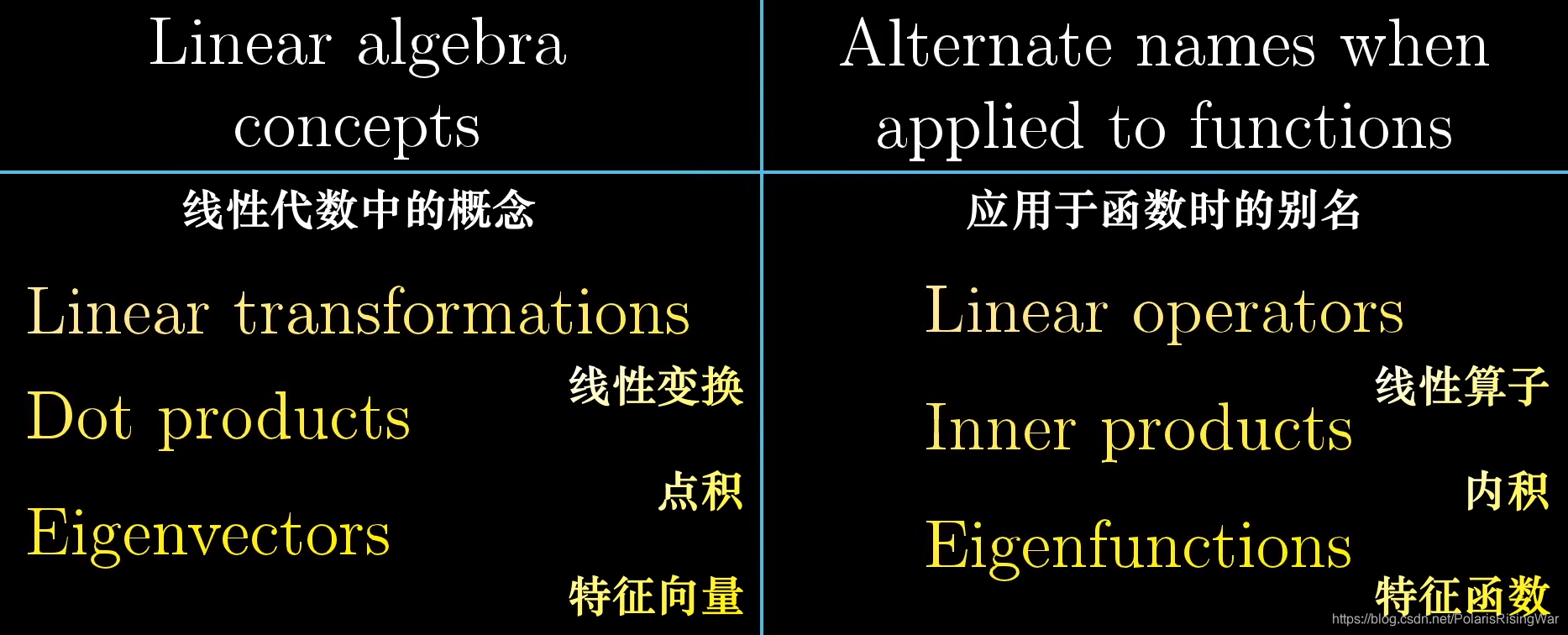
- 线性变换/线性算子:如导数/微分算子(可加性的严格定理见本系列笔记第3章)
- 举例来说,以全体多项式为一个空间,可以以1,
x
x
x,
x
2
x^{2}
x2,
x
3
x^{3}
x3…为基函数
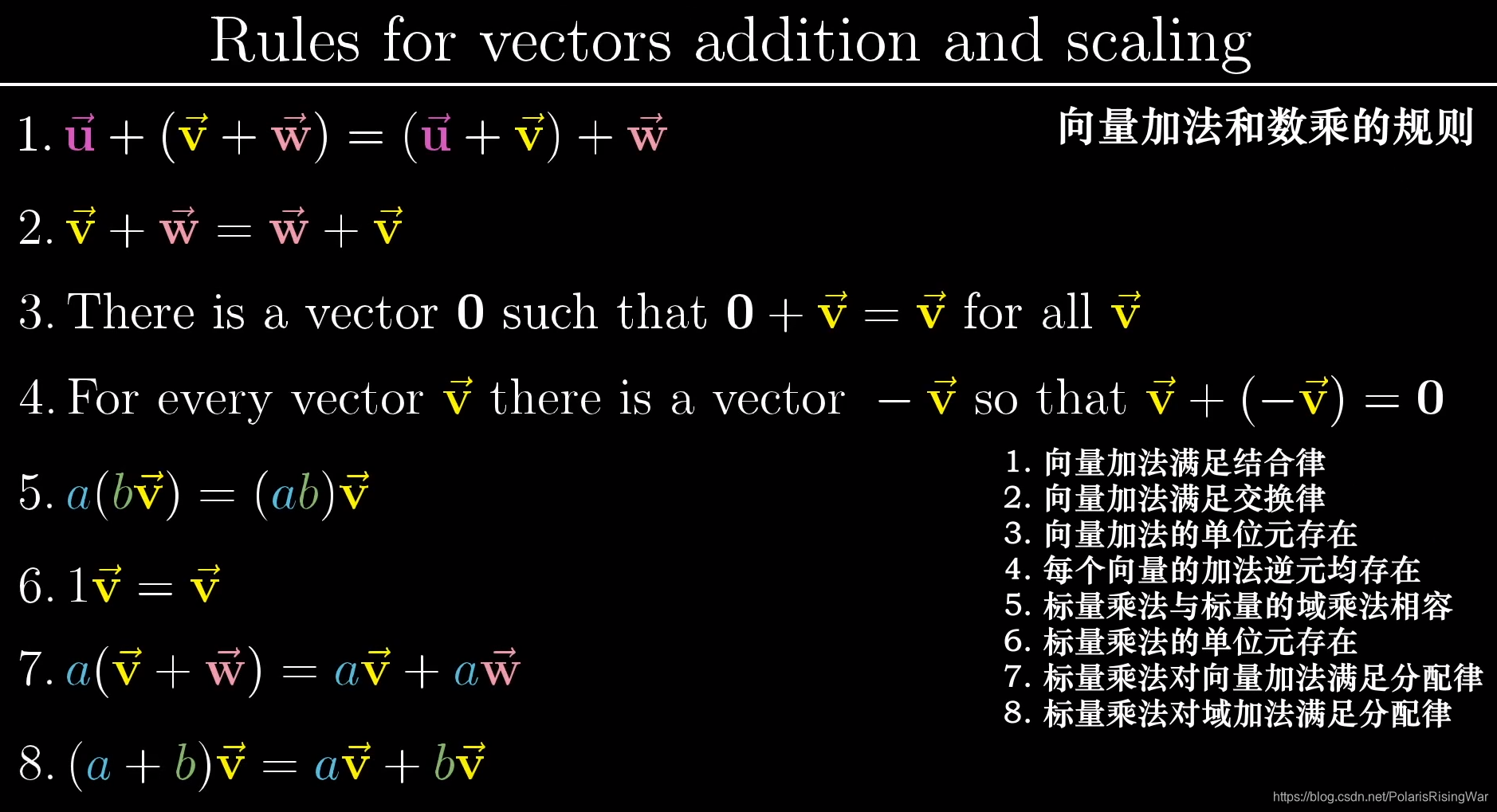
- 有很多数学事物都跟向量一样(只要对象集具有合理的数乘和相加概念)
类似向量的事物:向量空间——8条公理
12. 克莱姆法则,几何解释
-
A
x
→
=
v
→
A\overrightarrow{x}=\overrightarrow{v}
Ax=v
本章仅考虑非零行列式情况
二维:输入向量与基向量分别形成的平行四边形的面积(有向)就是其x/y的值
三维:输入向量某轴上的值,是该向量与另外两轴基向量形成的平行六面体体积
所有面积伸缩的比例都等于给定的行列式(也就是说,变换后的面积是: d e t ( A ) × y (或 x ) det(A)\times y(或x) det(A)×y(或x))
所以可以这么算y: y = Area det ( A ) y=\dfrac{\text{Area}}{\det \left( A\right) } y=det(A)Area
其中, det ( A ) \det(A) det(A)是可算的,而 A r e a Area Area是用这个输入向量与基向量组成的新矩阵的行列式来算出来的
克莱姆法则 - 正交变换(旋转):不改变点积的变换
- 更快的解法:高斯消元法


















 563
563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











