







 超级会员免费看
超级会员免费看
综述
车载单目摄像头是车载感知系统的核心组件之一,其核心特征是单镜头 + 单图像传感器的硬件架构,通过软件算法实现对车辆周边环境的二维(2D)目标识别、定位及状态判断,广泛应用于辅助驾驶(ADAS)和低级别自动驾驶(L1/L2)系统中。
与双目摄像头(依赖视差测距)、激光雷达(依赖点云建模)相比,单目摄像头以 “低成本、小体积、成熟算法” 为核心优势,是当前车载感知方案中性价比最高的选择之一。
一、车载单目摄像头工作原理介绍
车载单目摄像头的核心工作逻辑是通过 “硬件成像 + 软件算法” 协同,弥补 “单镜头无物理视差” 的先天局限,最终将 “图像” 转化为车载系统可识别的 “环境感知数据”(如目标类型、距离、速度)。其完整工作流程可拆解为 5 个关键步骤,从物理光线采集到功能指令输出形成闭环:
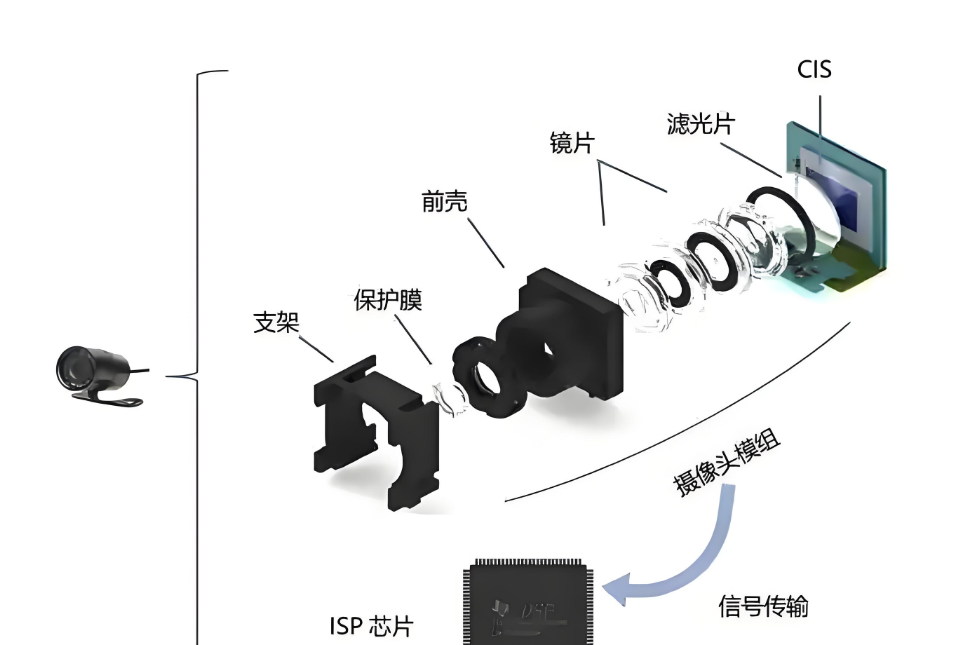
第一步:光线采集与原始成像
感知的 “源头”,核心是将外界物理光线转化为电子信号,依赖光学镜头和图像传感器两大硬件:

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1007
1007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









