







超声波介绍


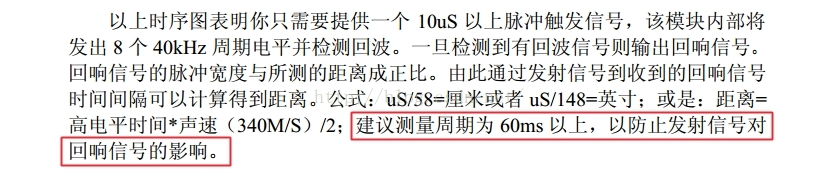
工作原理:

时序图:

cube配置
用引脚PB8 PB9可以自己改

时钟选择72M外部晶振的
设置定时器
定时时间 = (Prescaler+1)× (Counter +1)/ 定时器时钟频率
例如,定时时间为 1ms,可设置Prescaler = 72-1;Counter = 1000 - 1;(TIM2时钟频率设置为72MHz)
当然也可以用我们习惯的,72 000 000(72M)/ 72-1(Prescaler) =1 000 000;
再用Counter 去除以1 000 000 ,如图中的 50 000 / 1 000 000 =0.05s;
格式为 定时时间=(Counter +1)/ {定时器时钟频率/(Prescaler+1)}

剩下串口自己点一下就好了
主程序代码:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
int fputc(int ch, FILE *f){
HAL_UART_Transmit (&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
#define TRIG_ON HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_SET);
#define TRIG_OFF HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_RESET);
float S1,S2,distance; //数据1,数据2,距离
int32_t distance1; //距离1
uint32_t chaoshenbo_flag=0;
double chaoshenbo_data = 0;
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void chaoShenBo(){
htim2.Instance->CNT=0;
TRIG_OFF;
TRIG_ON;
HAL_Delay(1);
TRIG_OFF; //根据时序要求拉低TR引脚,等待EC引脚回应
while(HAL_GPIO_ReadPin(ECHO_GPIO_Port,ECHO_Pin)==GPIO_PIN_RESET);
S1=htim2.Instance->CNT; //EC回应低,记录其时间S1
while(HAL_GPIO_ReadPin(ECHO_GPIO_Port,ECHO_Pin)==1);
S2=htim2.Instance->CNT; //EC回应高,记录其时间S2
distance=(S2-S1)*0.034/2; //用时间S2-S1=声波返回时间 再乘0.034/2(声速/2)=距离 时间*速度=距离
distance1=distance*100; //将小数放大百倍
distance=distance1; //转化为整数型 去掉后面尾数 保证数据精确 反正我是这样子想的
distance/=100; //转回浮点数
/**以上操作相当于x*100/100=x(但尾部小数被滤掉了)**/
/**取100次的平均值,达到滤波的效果,准确一点**/
// chaoshenbo_data=chaoshenbo_data+distance;
// if( chaoshenbo_flag == 100-1 )
// {
// chaoshenbo_data/=100;
// chaoshenbo_data*=10; //cm转mm 乘10
// chaoshenbo_flag=0;
// distance1=chaoshenbo_data;
// printf("Dostace is :%dmm \r\n",distance1);
// }else{
// chaoshenbo_flag++;
// }
printf("distance:%f",distance);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
printf("gg\r\n");
chaoShenBo();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/

工程文件:https://download.csdn.net/download/weixin_51102592/22410732?spm=1001.2014.3001.5503
















 2461
2461











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











