









IMX6ULL 学习笔记
version : v1.0 「2023.4.27」
author: Y.Z.T.
简介: 随记, 关于I.MX6ULL 系统SOC 的部分寄存器
⭐️ 目录
文章目录
1️⃣ 裸机
简单了解原理
1.1 GUN汇编
1.1.1 与ARM汇编的伪操作差异
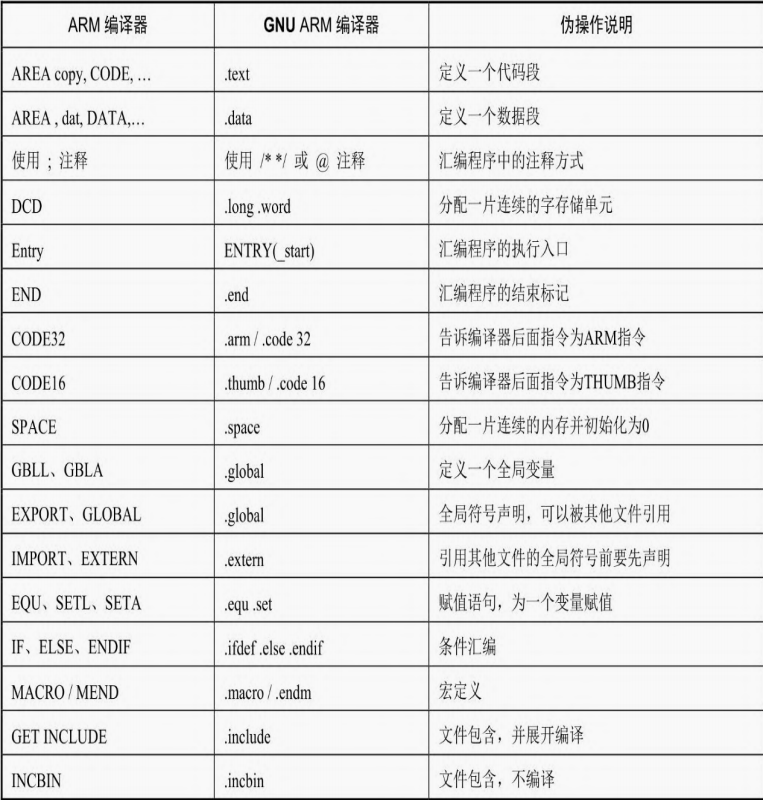
1.1.2 常见GUN ARM 伪操作指令

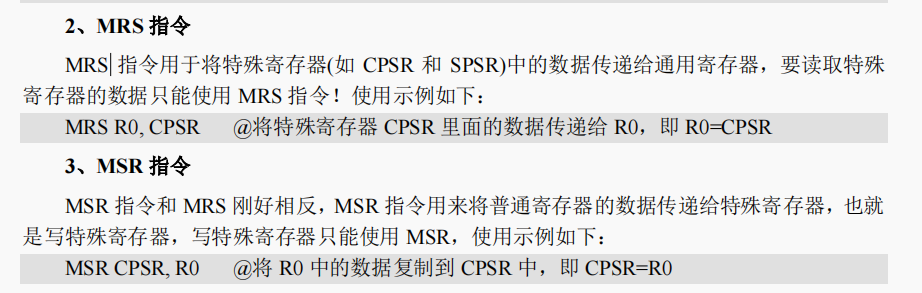
补充数据传输指令
1.1.3
在
GUN ARM汇编语言中 , 标号_start是汇编程序的入口 , 如果希望这个标号被其他文件引用 , 只需要在定义的地方使用.globa伪操作声明即可 (.globa表示定义一个全局标号 ).globa -start ...
.section 伪操作
可以通过
.section伪操作自定义一个段.section <section name> {,"<flags>"} .section .mysection "awx" @注释 : 定义一个可写、可执行的段 .align 2
- 注意在使用伪操作
.section定义一个段时,每个段以段名开始,以 下一个段名或文件结尾 作为结束标记。- 在定义段名时,注意不要和系统预留的段名冲突,(如
.text、.data、.bss、.rodata)
系统预留的段名
1.1.4 基本数据格式
在定义数据的过程中需要注意 :
- 二进制 数据通常以
0B或0b开头- 八进制 数据以
0开头- 十六进制 数据以
0x开头- 十进制 数据则以
非0数字开头- 负数 前面加
-- 取补 用
~- 不相等 用
〈〉- 其他运算符号如
+、-、*、%、<、<<、\>、>>、|、&、^、!、==、>=、&&与C语言语法相似- 字符串常量 要用双引号
""括起来- 使用
.ascii定义字符串时要自行在结尾加\0.string伪操作可以定义多个字符串.asciz伪操作可以定义一个以NULL字符结尾的字符串- 用
.rept 伪操作可以重复定义数据- 在
GNU ARM汇编程序中经常使用小圆点.表示 当前指令的地址.ascii "hello\0" .string "hello", "world!" .asciz "hello" .rept 3 .byte 0x10 .endr
1.1.5 .equ 伪操作
使用 伪操作 定义浮点数
@标签: 命令 f: .float 3.14 .equ f,3.1415
- 上面通过使用
.float伪操作定义一个浮点数f,并初始化为3.14- 并通过
.equ伪操作 将浮点数重新赋值成3.1415
.equ伪操作除了给数据赋值,还可以把常量定义在代码段中,然后在代码中直接引用。类似C语言中的#define宏定义.section .data .equ DELAY,100 ... .section .text ... MOV R0,$DELAY ...
1.1.6 补充
stmdb和ldmia
- stmdb和ldmia指令一般配对使用
- stmdb用于将寄存器压栈
- ldmia用于将寄存器弹出栈
- 它们的作用是保存使用到的寄存器
ARM指令的多数据传输(STM、LDM)中,提到:多寄存器的Load和Store指令分为2组:
- 一组用于数据的存储与读取,对应于IA、IB、DA、DB,
- 一组用于堆栈操作,对应于FD、ED、FA、EA,
STMIB(地址先增而后完成操作)、STMFA(满递增堆栈);LDMIB、LDMED;STMIA(完成操作而后地址递增)、STMEA(空递增堆栈);LDMIA、LDMFD;STMDB(地址先减而后完成操作)、STMFD(满递减堆栈);LDMDB、LDMEA;STMDA(完成操作而后地址递减)、STMED(空递减堆栈);LDMDA、LDMFA。
IA模式表示:每次传送后地址+4;(After Increase)DB模式表示:每次传送前地址-4;(Before Decrease)
1.2 IO复用表
在《imx6ull 中文参考手册》 199页
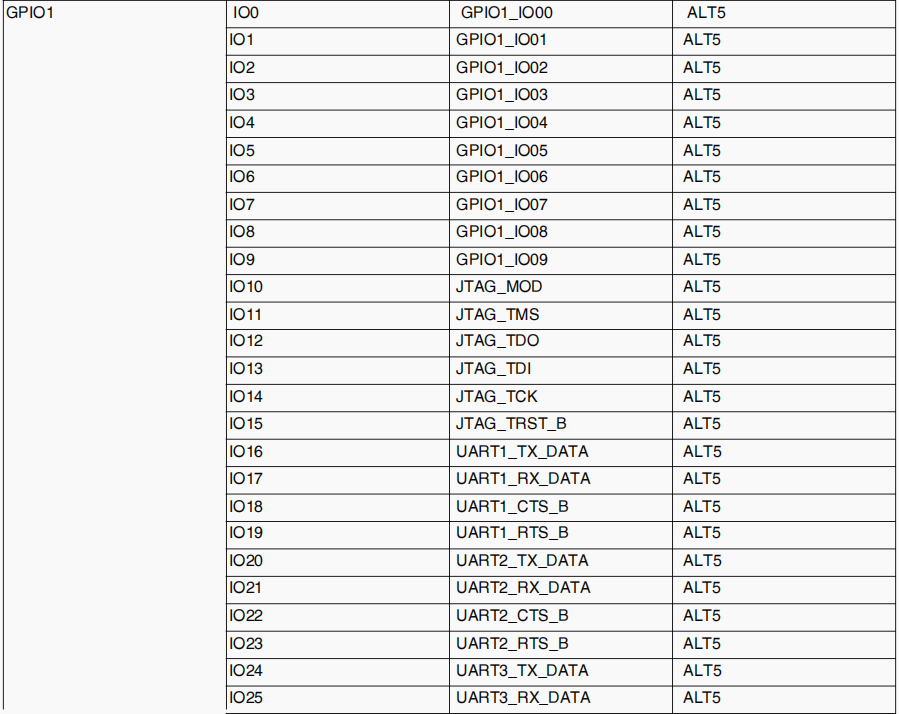
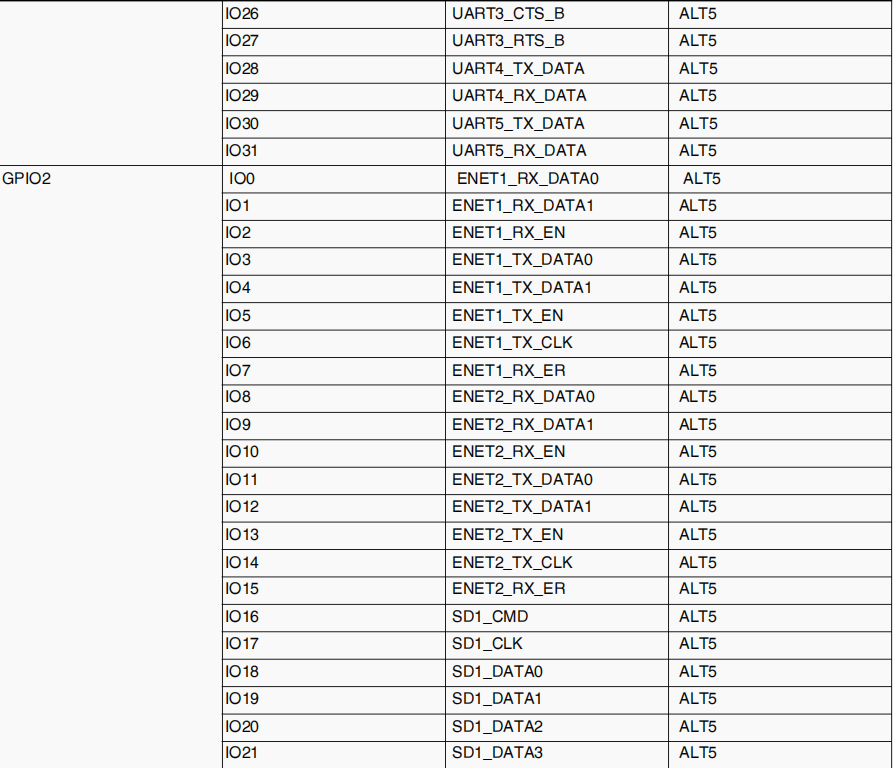
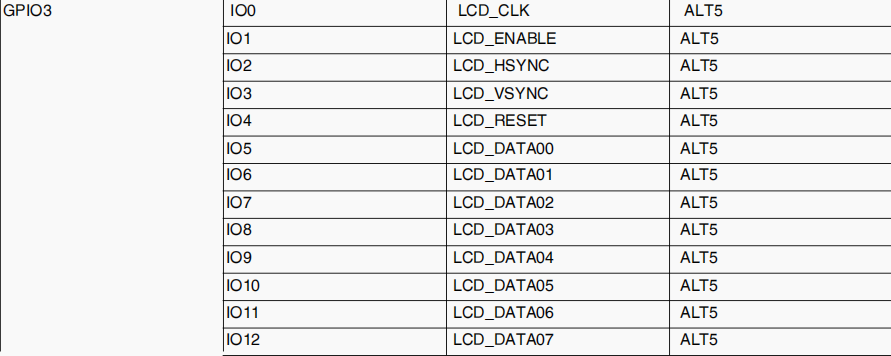
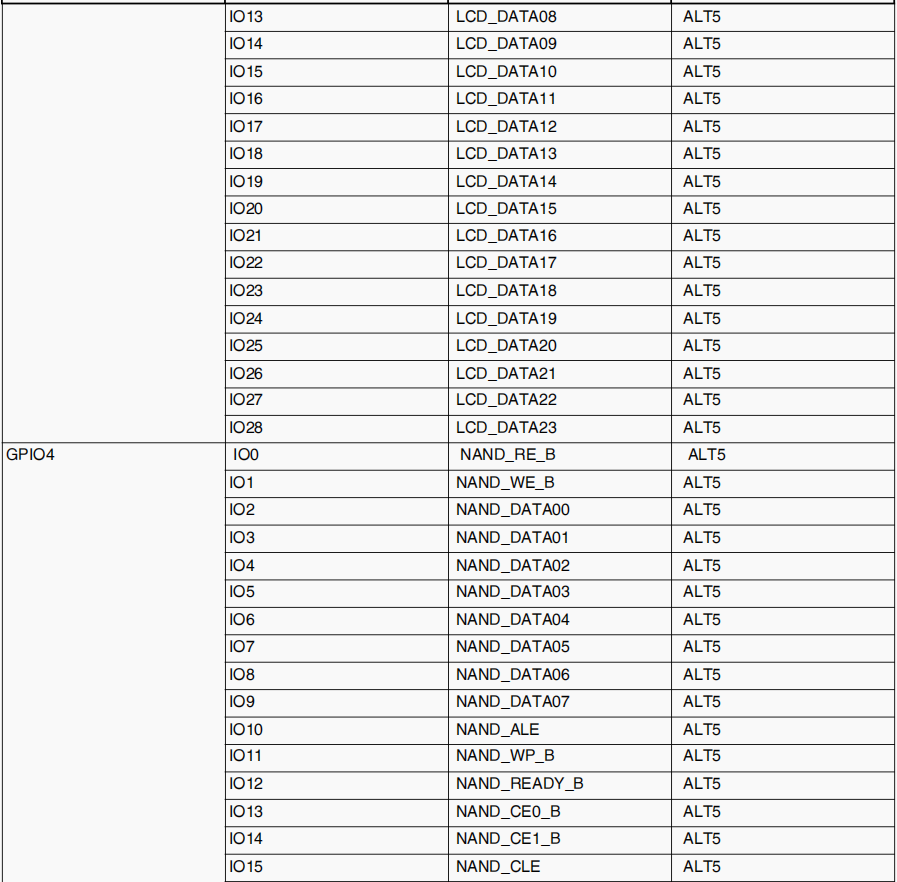
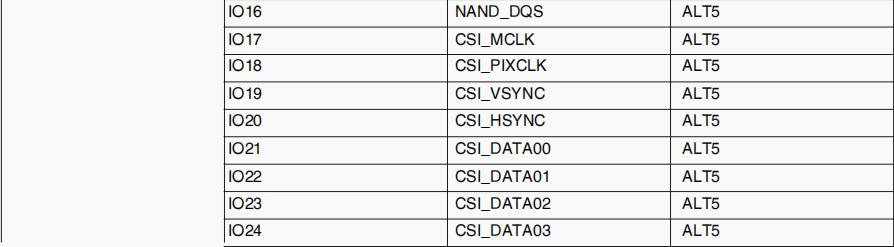
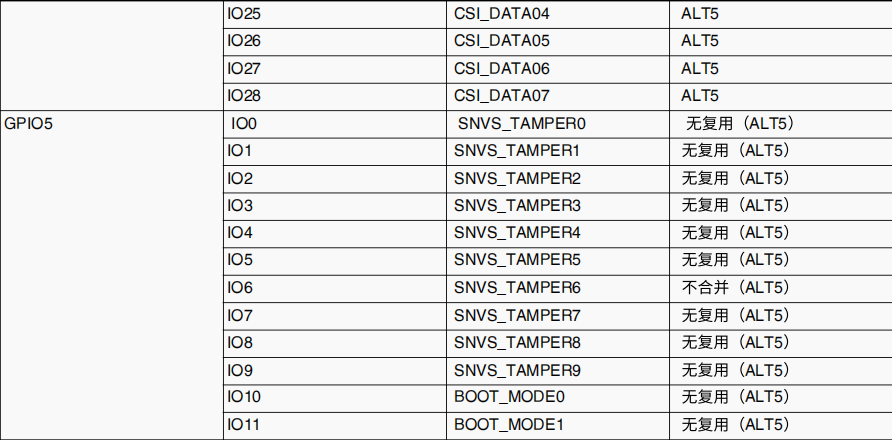
可以看见 :
- GPIO1 有 32 个 IO
- GPIO2 有 22 个 IO
- GPIO3 有 29 个 IO
- GPIO4 有 29 个 IO
- GPIO5 有 12 个 IO
1.3 复用为GPIO时的寄存器
1.3.1 IO复用功能和IO电气属性
-
SW_MUX_CTL_PAD_*: 配置IO口的复用功能以
GPIO1_IO1举例: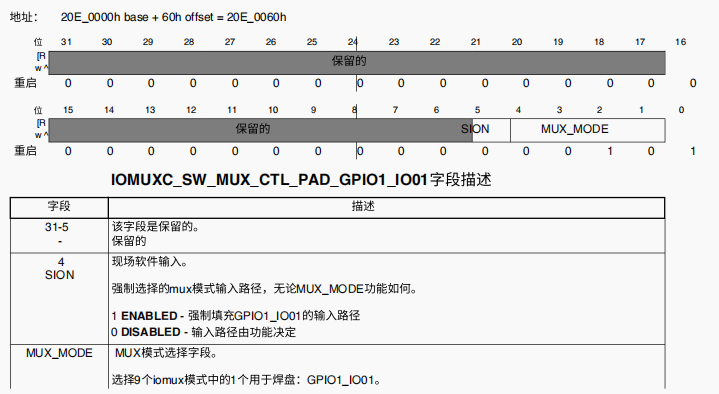

- 可以看到
GPIO1_IO01可以复用为8种不同功能的IO
- 可以看到
-
SW_PAD_CTL_PAD_*: 配置IO口的电气属性还是以
GPIO1_IO00举例: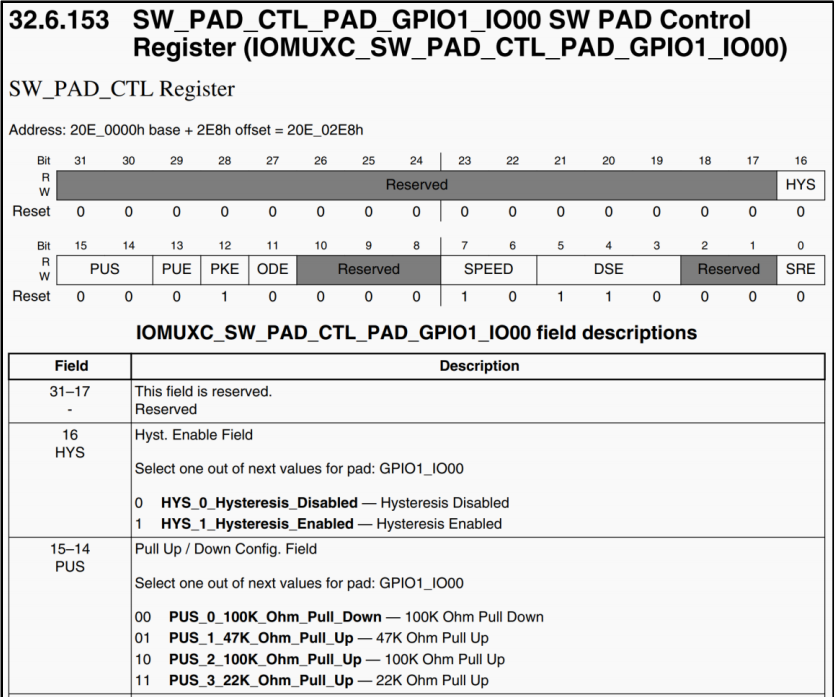
- 用于配置
IO的 上下拉电阻、IO速度、IO驱动能力、压摆率等电气属性 - 一般主要设置压摆率 (SRE)、驱动能力 (DSE)、速度 (SPEED )、上下拉 ( PUS)、 开漏 (ODE)
- 用于配置
1.3.2 复用为GPIO时其他寄存器
- DR寄存器: 数据寄存器
- 寄存器中的每一位对应一个IO
- 当 GPIO 被配置为输出功能 以后 , 向指定的位写入数据那么相应的 IO 就会输出相应的高低电平 ( 如 :
GPIO1_IO00输出高电平,那么就应该设置GPIO1.DR=1) - 当 GPIO 被配置为输出功能 以后 , 此寄存器就保存着对应 IO 的电平值 (如 : 当
GPIO1_IO00这个引脚接地的话,那么GPIO1.DR的bit0就是 0)
- GDIR 寄存器 : 方向寄存器
- 寄存器中的每一位对应一个IO , 用来设置某个IO的工作方向
- 如果要设置一个GPIO为输入 , 则对应的位设置为0 (如 : 要设置
GPIO1_IO00为输入,那么GPIO1.GDIR=0) - 如果要设置一个GPIO为输出 , 则对应的位设置为1
- PSR 寄存器 : 状态寄存器
- 寄存器中的每一位对应一个IO , 获取对应
GPIO的状态 - 读取相应的位即可获取对应的 GPIO 的状态,也就是 GPIO 的高低电平值 ( 功能和输入状态下的
DR寄存器一样。 )
- 寄存器中的每一位对应一个IO , 获取对应
-
ICR1 和 ICR2寄存器 : 中断控制寄存器
-
寄存器中的每两位对应一个IO ,
ICR1用于配置低16个GPIO (IO0 ~ IO15) , ICR2 用于配置高 16 个 GPIO ( IO16~ IO31 ) -
这两个位用来配置中断的触发方式
举例: 设置
GPIO1_IO15为上升沿触发中断 (GPIO1.ICR1=2<<30)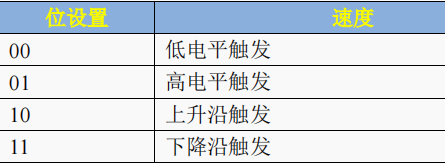
-
- IMR 寄存器 : 中断使能寄存器
- 寄存器中的每一位对应一个IO , 用来控制 GPIO 的中断禁止和使能
- 如果使能某个 GPIO 的中断,那么设置相应的位为 1 ; ( 如: 使能
GPIO1_IO00的中断,那么就可以设置GPIO1.MIR=1) - 禁止中断 , 则设置相应的位 0
- ISR 寄存器 : 中断状态寄存器
- 寄存器中的每一位对应一个IO , 用于判断
GPIO中断是否发生 - 只要某个 GPIO 的中断发生 , 那么ISR中相应的位就会被置1
- 在处理完中断之后 , 必须清除中断标志位
- 寄存器中的每一位对应一个IO , 用于判断
- EDGE_SEL 寄存器 : 边沿选择寄存器
- 寄存器中的每一位对应一个IO , 用来设置边沿中断
- 这个寄存器会覆盖
ICR1和ICR2的设置 - 如果相应的位被 置 1,那么就相当与设置了对应的 GPIO 是 上升沿和下降沿(双边沿) 触发
- ( 例如 : 设置
GPIO1.EDGE_SEL=1,那么就表示GPIO1_IO01是双边沿触中断 )
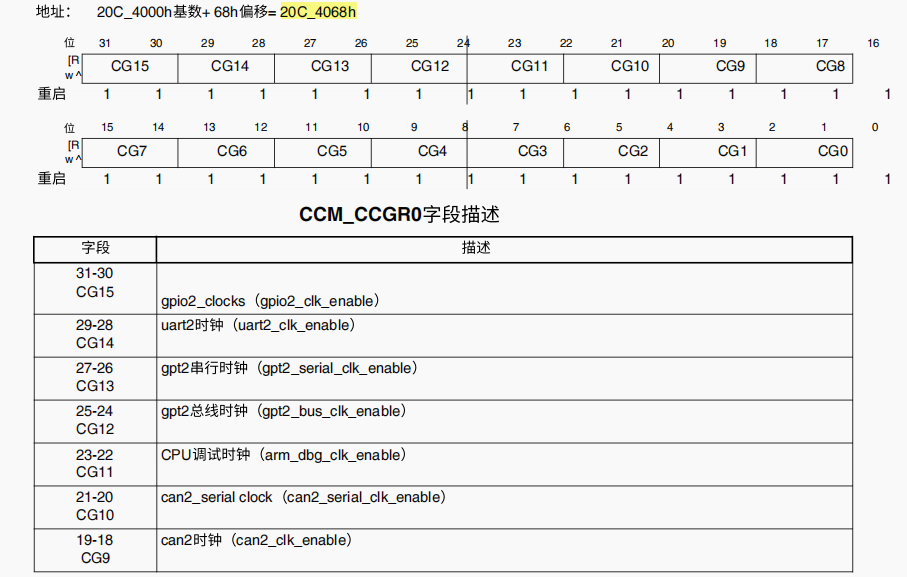
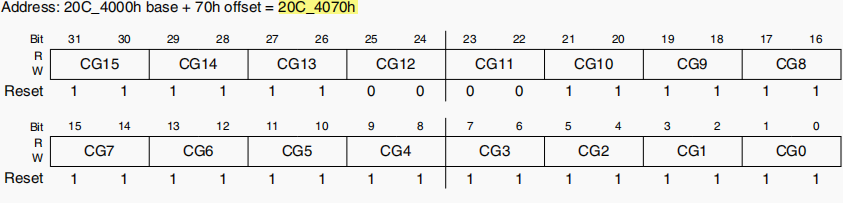
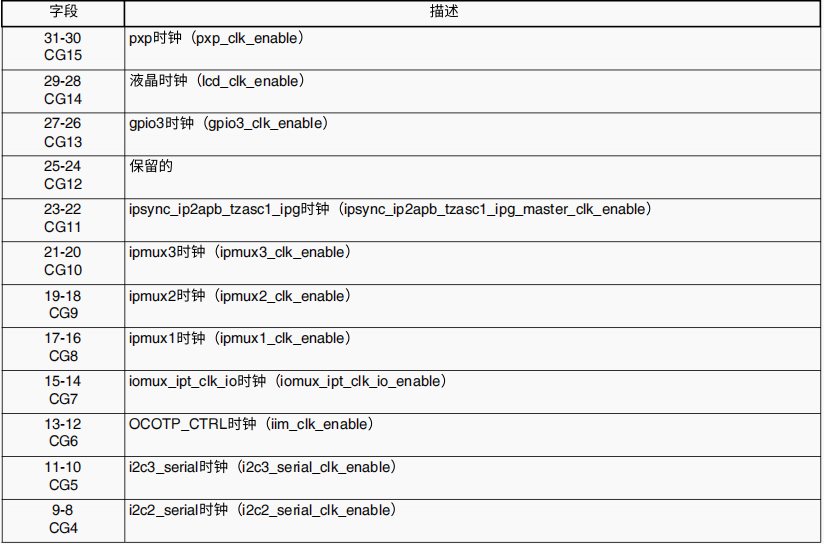
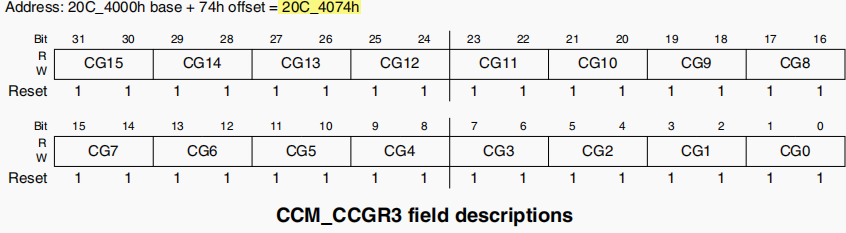
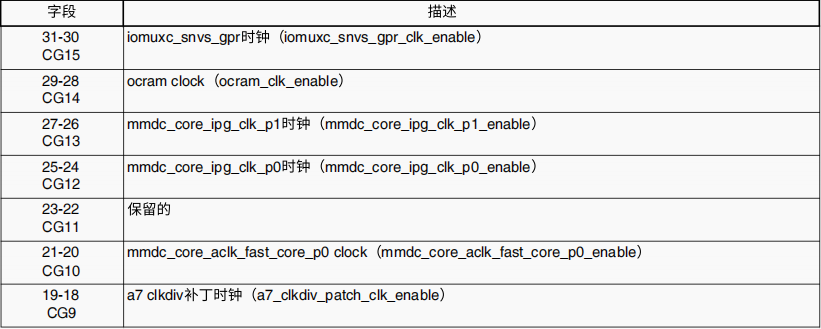
1.4 CCM时钟控制寄存器 (CCM_CCGRx)
CCM_CCGRx寄存器 用于使能各个外设模块的时钟 , 为每2位对应一个外设时钟CGR值如下所示:

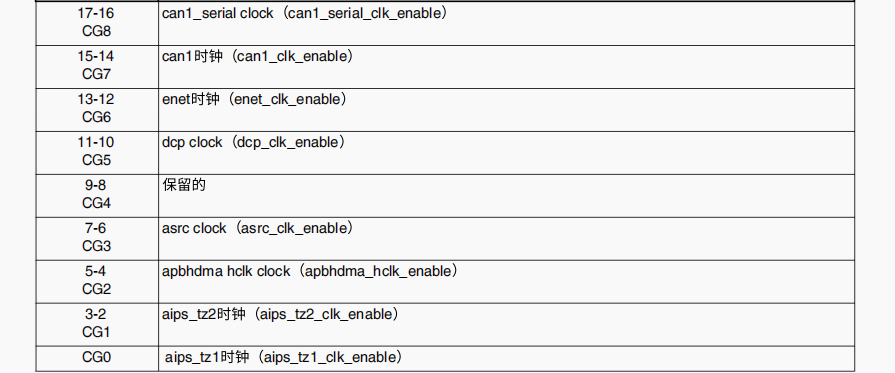
1.4.1 CCM_CCGR0
地址 : 0x 20C_4068H
使能方式 :
以GPIO2的时钟为例 ( CCM_CCGR0 = 3<<30 )
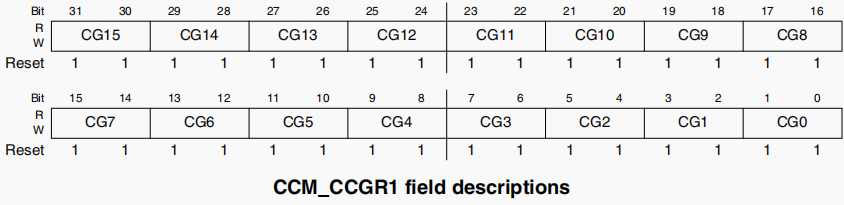
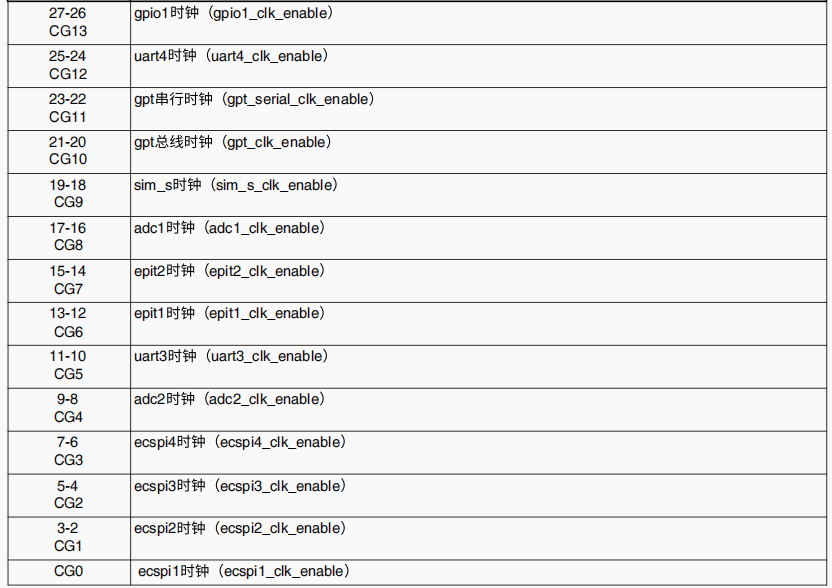
1.4.2 CCM_CCGR1
地址 :
0x20C_406CH

1.4.3 CCM_CCGR2
地址 :
0x 20C_4070H

1.4.4 CCM_CCGR3
地址
0x20C_4074H
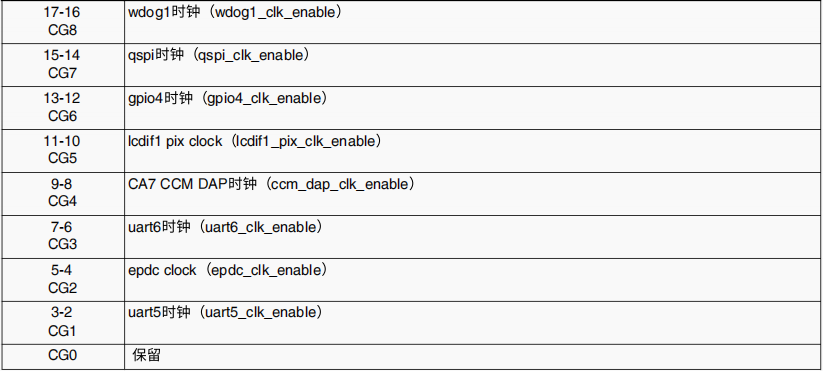
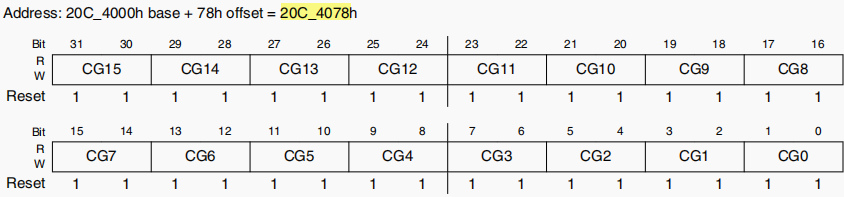
1.4.5 CCM_CCGR4
地址 :
0x20C_4078H

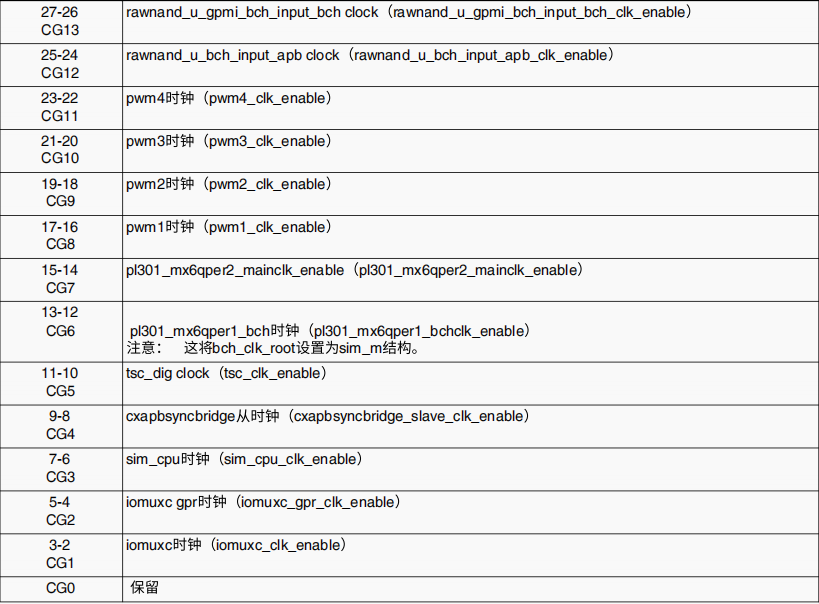
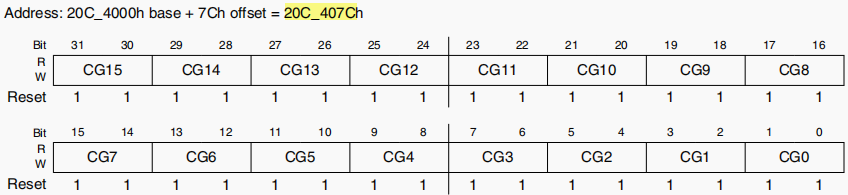
1.4.6 CCM_CCGR5
地址 :
0x20C_407CH
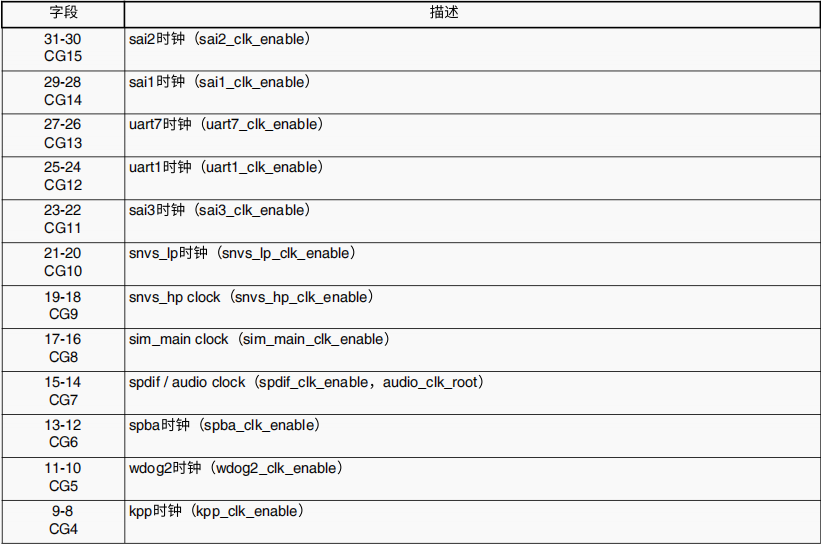

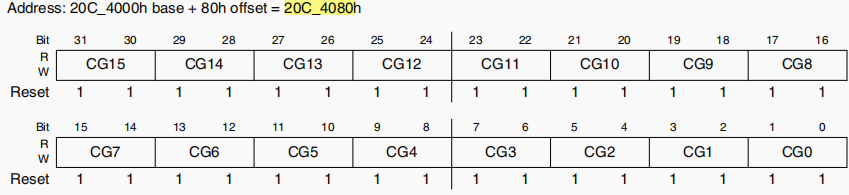
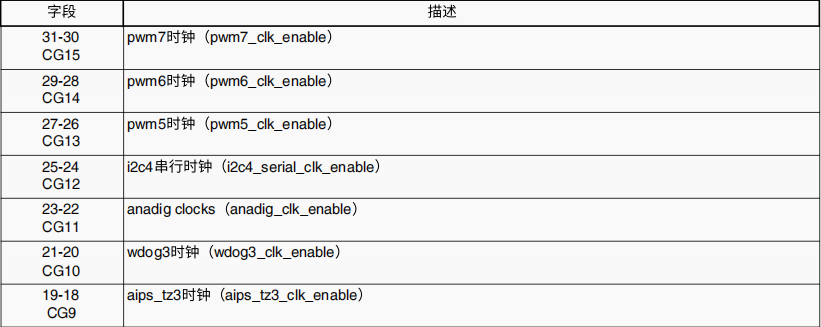
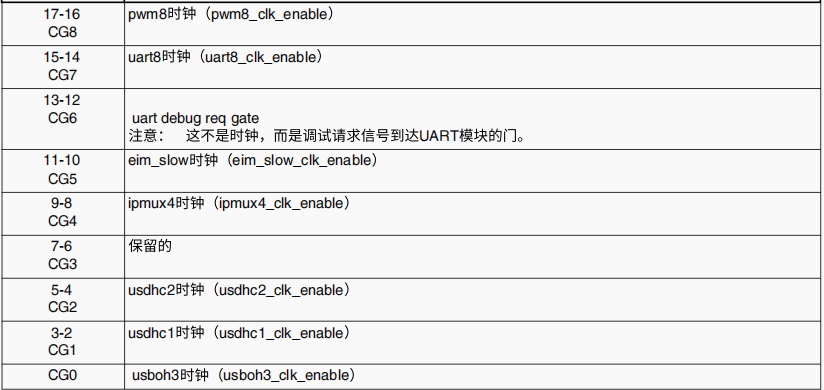
1.4.7 CCM_CCGR6
地址 :
0x20C_4080H
1.5 IO复用为GPIO
一般步骤:
- 使能
GPIO对应的时钟 (CCM_CCGRx寄存器) - 设置寄存器
IOMUXC_SW_MUX_CTL_PAD_XX_XX,设置 IO 的复用功能 - 设置寄存器
IOMUXC_SW_PAD_CTL_PAD_XX_XX,设置 IO 的上下拉、速度等电气属性 - 配置GPIO专属寄存器 , 配置GPIO的输入输出、是否使用中断 等 (
DR、GDIR、ICR等寄存器)
1.6 可执行文件
将裸机的汇编点灯程序编译成可执行文件
.bin, 需要在.bin文件前面添加 头部信息包括 镜像向量表 (
IVT) 、Boot启动数据 (Boot data)、 配置信息 (DCD)等 , 后面才是用户可执行代码 (Application)
如下所示:
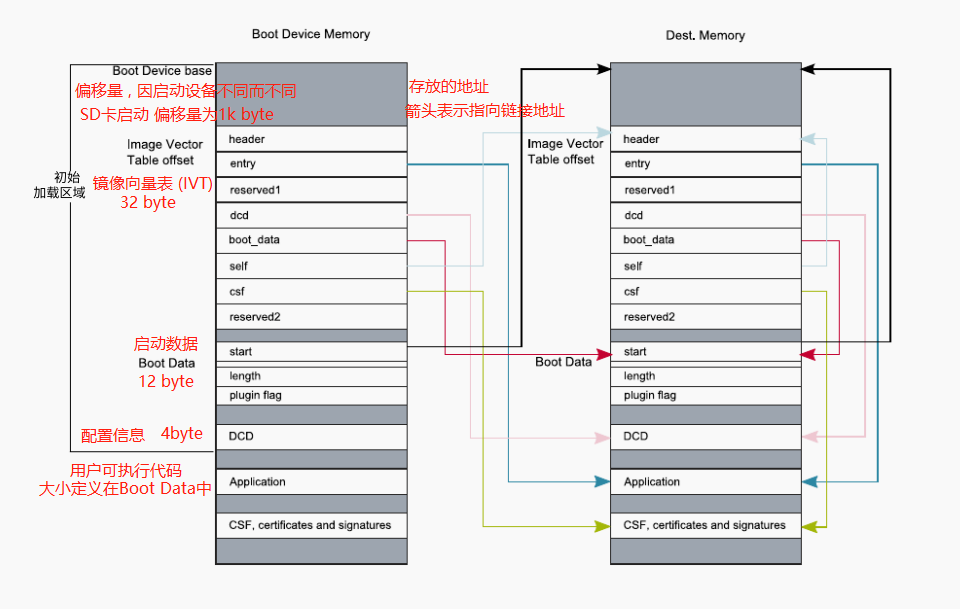
不同引导设备的 偏移量与 加载区域大小 ( 即 头部信息)
- 则
IVT + Boot Data + DCD的大小为 加载区域大小 减去 偏移量 (4K Byte - 1K Byte = 3K Byte)
在
IVT和Boot Data中存放着各个 部分的 链接地址如 :
entry存放的是镜像第一行指令所在的位置 , 即 用户执行代码 的入口 , 可以看到箭头指向了Application
self存放的是IVT复制到DDR中以后的首地址 , 可以看到箭头目的地址指向IVT的开头

1.6.1 各部分起始地址
在裸机点灯的程序中, 链接的地址是 0x87800000
即 用户执行代码 (
Application) 的 起始地址entry = 0x87800000镜像向量表 (
IVT) 的起始地址self = 0x877FF400[0x87800000 - 3k byte = 0x877FF400]
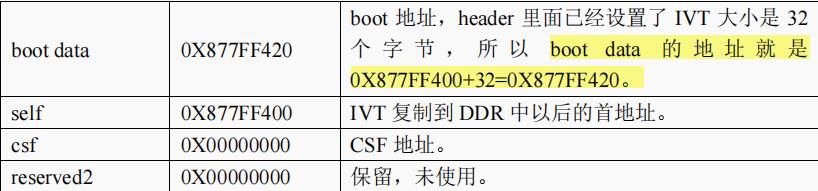
Boot启动数据 (Boot Data) 的起始地址boot data = 0x877FF420
- [ 此处是
IVT的地址 加上IVT的长度0x877FF400 + 32 Byte = 0x877FF420]
配置信息 (
DCD) 的起始地址dcd = 0x877FF42C
- [ 此处是
Boot Data的地址 加上Boot data的长度0x877FF420 + 12 Byte = 0x877FF42C]
整个头部信息的 起始地址
start = 0X877FF000
- [ 此处是 IVT 的起始地址 减去 1K Byte 的偏移量
0x877FF400 - 1K Byte = 0X877FF000]
1.6.2 镜像向量表
镜像向量表 ( IVT ) 存放了 8条 信息 , 每条信息大小都是 32位
IVT 存放的内容:
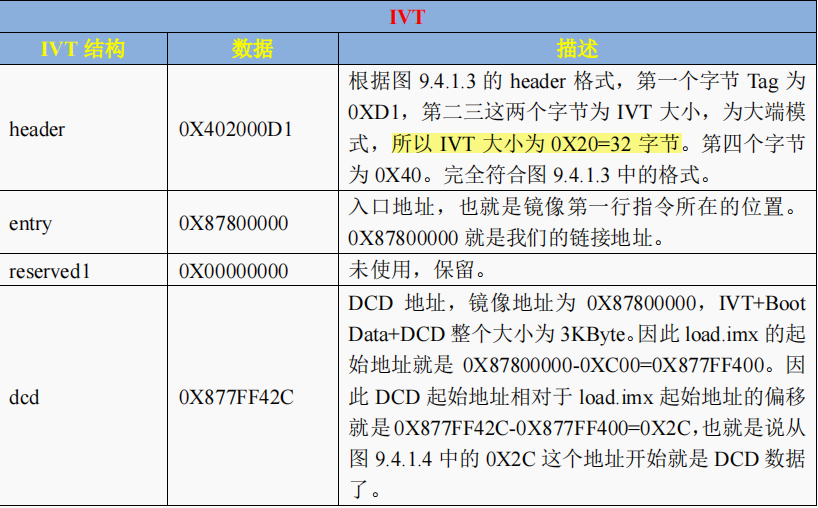
header 存放格式:

Tag为一个字节长度,值固定为0XD1Length为大端模式的两字节字段 , 存放着IVT的长度信息 , IVT 长度固定为32字节 (0x0020) , 则Length = 0x2000Version为单字节字段 , 值为0x40或0x41
1.6.3 Boot Data
Boot Data 存放了 3条 信息 , 每条信息大小都是 32位

start存放的是整个头部信息的存放地址 , 包含偏移量length存放的是整个镜像 文件的大小plugin插件
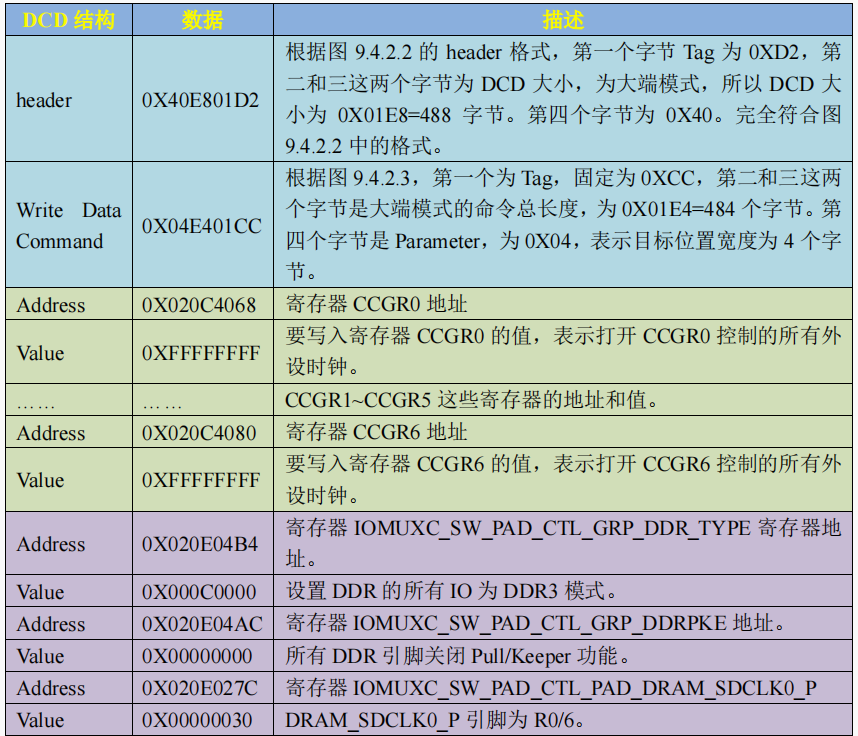
1.6.4 DCD数据
DCD 存放 程序镜像中包含的各种配置信息 ( 即
IMX6ULL寄存器地址 和对应配置信息的集合 )因为复位芯片后 ,
I.MX6U片内的所有寄存器都会复位为默认值,但是这些默认值往往不是我们想要的值 , 通过在DCD中添加这部分寄存器的配置信息 ( 如系统时钟 ) ,Boot ROM会使用这些寄存器地址和配置集合来初始化相应的寄存器DCD 区域不能超过 1768Byte
DCD格式 :
Header格式

Tag是单字节,固定为0XD2Length为大端模式的两字节字段 , 存放着DCD的长度信息Version为单字节 , 固定为0x41
CMD 格式:
CMD 包含 写数据命令、检查数据命令、NOP命令、解锁命令
其中写数据命令格式如下:
- Tag 是单字节,固定为
0xCCLength为大端模式的两字节字段 , 存放着*** 写入数据的长度信息***CMD是命令 , 包含headerAddress是地址 , 存放着写入数据的目标地址 ( 即寄存器地址 )Value / Mask值或掩码 , 存放着前一个 地址 (Address) 的数据值 ( 即寄存器值)
Parameter参数 的格式如下:
Parameter为单字节数据bytes表示是目标位置宽度,单位为byte,可以选择 1、2、和 4 字节flags是命令控制标志位



例:
1.7 点灯(GPIO复用测试)
1.7.1 启动文件(start.S)
// 定义全局入口符号
.global _start
_start:
mrs r0, cpsr // 将CPSr寄存器的值读到 r0 中
bic r0, r0, #0x1f // 0001 1111 将低5位清零
orr r0, r0, #0x13 // 0001 0011 将 [M0 ~ M4]设置为SVC模式
msr cpsr, r0 // 将r0 的值重新写回cpsr寄存器中
ldr sp, =0x80200000 // Cortex -A 是FD满递减栈 , DDR的起始地址是0x80000000 , 栈空间 2MB
b main // 跳转main函数
1.7.2 源文件与头文件
main.c && led.c
/******************************** main.c ******************************/
#include "main.h"
#include "led.h"
/*
* @description : 短时间延时函数
* @param - n : 要延时循环次数(空操作循环次数,模式延时)
* @return : 无
*/
void delay_short(volatile unsigned int n)
{
while(n--){}
}
/*
* @description : 延时函数,在 396Mhz 的主频下延时时间大约为 1ms
* @param - n : 要延时的 ms 数
* @return : 无
*/
void delay(volatile unsigned int n)
{
while(n--)
{
delay_short(0x7ff);
}
}
int main(void)
{
led_init();
while (1)
{
set_led_off();
delay(500);
set_led_on();
delay(500);
}
return 0;
}
/******************************** led.c ******************************/
#include "led.h"
#include "main.h"
void led_init (void)
{
/* 使能时钟 */
CCM->CCGR1 = (3 << 26) | (3 << 18) ; //使能GPIO1的时钟 和 SIM时钟 , 因为是烧录到SD卡的
/* IO复用为GPIO */
SW_MUX_GPIO1_IO03 = 0x05;
/* 电气属性设置 */
SW_PAD_GPIO1_IO03 = 0x00001058;
/* GPIO 设置为输出 */
GPIO1->GDIR = 1 << 3;
/* GPIO初始化为低电平 */
GPIO1->DR = 0;
}
void set_led_on(void)
{
GPIO1->DR &= ~(1 << 3);
}
void set_led_off(void)
{
GPIO1->DR |= (1 << 3);
}
main.h $$ led.h
/******************************** led.h ******************************/
#ifndef __LED_H
#define __LED_H
void led_init (void);
void set_led_on(void);
void set_led_off(void);
#endif
/******************************** main.h ******************************/
#ifndef __MAIN_H
#define __MAIN_H
/*
* 外设寄存器组的基地址
*/
#define CCM_BASE (0X020C4000)
#define GPIO1_BASE (0x0209C000)
/*
* IOMUX 相关寄存器地址
*/
#define SW_MUX_GPIO1_IO03 *((volatile unsigned int *)0X020E0068)
#define SW_PAD_GPIO1_IO03 *((volatile unsigned int *)0X020E02F4)
/*
* CCM寄存器结构体定义
*/
typedef struct
{
volatile unsigned int CCR;
volatile unsigned int CCDR;
volatile unsigned int CSR;
volatile unsigned int CCSR;
volatile unsigned int CACRR;
volatile unsigned int CBCDR;
volatile unsigned int CBCMR;
volatile unsigned int CSCMR1;
volatile unsigned int CSCMR2;
volatile unsigned int CSCDR1;
volatile unsigned int CS1CDR;
volatile unsigned int CS2CDR;
volatile unsigned int CDCDR;
volatile unsigned int CHSCCDR;
volatile unsigned int CSCDR2;
volatile unsigned int CSCDR3;
volatile unsigned int RESERVED_1[2];
volatile unsigned int CDHIPR;
volatile unsigned int RESERVED_2[2];
volatile unsigned int CLPCR;
volatile unsigned int CISR;
volatile unsigned int CIMR;
volatile unsigned int CCOSR;
volatile unsigned int CGPR;
volatile unsigned int CCGR0;
volatile unsigned int CCGR1;
volatile unsigned int CCGR2;
volatile unsigned int CCGR3;
volatile unsigned int CCGR4;
volatile unsigned int CCGR5;
volatile unsigned int CCGR6;
volatile unsigned int RESERVED_3[1];
volatile unsigned int CMEOR;
} CCM_Type;
/*
* GPIO寄存器结构体
*/
typedef struct
{
volatile unsigned int DR;
volatile unsigned int GDIR;
volatile unsigned int PSR;
volatile unsigned int ICR1;
volatile unsigned int ICR2;
volatile unsigned int IMR;
volatile unsigned int ISR;
volatile unsigned int EDGE_SEL;
}GPIO_Type;
/*
* 外设指针
*/
#define CCM ((CCM_Type *)CCM_BASE)
#define GPIO1 ((GPIO_Type *)GPIO1_BASE)
#endif
1.7.3 Makefile
CC =arm-linux-gnueabihf
link :=-ld -Timx6ul.lds -o # 使用链接脚本
elf_bin :=-objcopy -O binary -S
obj :=$(subst .S,.o,$(wildcard *.S)) $(subst .c,.o,$(wildcard *.c)) #将c文件和s文件替换成 o 文件
ledc.bin: $(obj)
$(CC)$(link) ledc.elf $^ # 链接
$(CC)$(elf_bin) ledc.elf $@ # 格式转换
%.o:%.c
$(CC)-gcc -Wall -nostdlib -c -o $@ $< # -Wall表示显示编译的时候的所有警告
%.o:%.S
$(CC)-gcc -Wall -nostdlib -c -o $@ $< # -nostdilib表示不链接系统标准启动文件和库文件
.PHONY: clean
clean:
rm *.o *.bin *.elf
1.7.4 链接脚本
SECTIONS{
. = 0X87800000;
.text :
{
start.o
*(.text)
}
.rodata ALIGN(4) : {*(.rodata*)}
.data ALIGN(4) : { *(.data) }
__bss_start = .;
.bss ALIGN(4) : { *(.bss) *(COMMON) }
__bss_end = .;
}
- 使用关键字
SECTIONS, 描述输出文件的内存布局.是 定位计数器 , 其值表示以其为地址开始 , 这里是以0x87800000为起始地址.text.rodata.data. bss分别是代码段、只读数据段、数据段、bss段- 这几个段名冒号后面的
ALIGN(4)表示以四字节对齐 , 大括号里面表示输入文件 ( 即将什么文件 放入哪一段)__bss_start和__bss_end相当于两个变量 , 其值均为定位符., 分别报存了bss段 的起始地址 和 结束地址 , 方便对bss段进行清零
1.8 时钟树
时钟树由三部分组成:时钟切换控制器,根时钟产生器,系统时钟
时钟切换控制器: 用来将外部晶振进行倍频,以实现稳定且高频的时钟信号。
根时钟产生器: 在时钟切换控制器配置完成之后的输出时钟就成了根时钟产生器的时钟源,在根时钟产生器中,经过寄存器配置之后,就成为了外设时钟的时钟源
一个外设的时钟信号的产生途径:晶振向芯片输入时钟信号,信号进入时钟切换控制器,经过用户配置,产生
PLL时钟信号,该信号进入根时钟产生步骤,经过分频或倍频,最终成为系统某个外设的时钟信号。
主时钟生成

ARM_PLL(PLL1),此路PLL是供ARM内核使用的,ARM内核时钟就是由此PLL生成的,此PLL通过编程的方式最高可倍频到1.3GHz
528_PLL(PLL2),此路PLL也叫做System_PLL,此路PLL是固定的 22 倍频 , 即528MHZ
- 此PLL 有四路PFD :
PLL2_PFD0、PLL2_PFD1、PLL2_PFD2、PLL2_PFD3, 这些PFD以PLL为基础,经过不同的分频系数产生不同频率的时钟- 官方推荐配置参数
USB1_PLL(PLL3),此路PLL主要用于USB1PHY, 此路PLL是固定的20倍频 , 即480MHZ
- 此PLL 也有四路PFD :
PLL3__PFD0、PLL3__PFD1、PLL3__PFD2、PLL3__PFD3- 官方推荐配置参数
USB2_PLL(PLL7)主要用于USB2PHY,此路PLL固定为20倍频,因此也是480MHz
ENET_PLL(PLL6), 此路PLL固定为20+5/6倍频 , 即480MHz
VIDEO_PLL(PLL5)用于显示相关的外设 ,PLL的输出范围在650MHz~1300MHz, 可选1/2/4/8/16分频
AUDIO_PLL(PLL4)用于音频相关的外设 ,PLL的输出范围在650MHz~1300MHz, 可选1/2/4分频


时钟树

- 橙色梯形的是 选择器 ,可以选择不同的
PLL时钟作为 时钟源- 矩形就是 分频器(2位,3位,6位)
- 黄色高亮的就是用来配置选择器的各种寄存器
- 红色字是用来配置分频系数的 , 就是配置 寄存器的某个几位<>















 2304
2304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









