







2021-10-9
文章目录
————————————————————————————
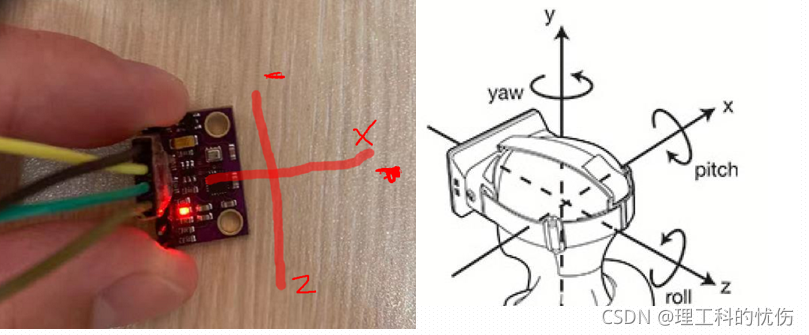
一.MPU9250
 1->板子 stm32f103rct6 ;传感器 mpu 9250
1->板子 stm32f103rct6 ;传感器 mpu 9250
2-> 串口输出PITCH、ROLL、YAW;
3->接线
PBout(6) //SCL
PBout(7) //SDA
4->
5->
t=MPU_Init();
while (t)
{
printf("MPU_Init error\n\r ");
delay_ms(200);
printf("t=%d\n\r ",t);
}
其中,把main函数中的这段注释了。主要是检测MPU9250连接了吗?
if(res==MPU6500_ID1||res==MPU6500_ID2) //器件ID正确
{
MPU_Write_Byte(MPU9250_ADDR,MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU9250_ADDR,MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(200); //设置采样率为200Hz
}else return 33; //返回值33 是为了自己便于调试,知道在哪里出了问题
//返回值33 是为了自己便于调试,知道在哪里出了问题
1.主程序
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "mpu9250.h"
#include "math.h"
/***********************宏定义***********************/
#define Kp 40.0f // proportional gain governs rate of convergence toaccelerometer/magnetometer
//Kp比例增益 决定了加速度计和磁力计的收敛速度
#define Ki 0.02f // integral gain governs rate of convergenceof gyroscope biases
//Ki积分增益 决定了陀螺仪偏差的收敛速度
#define halfT 0.004f // half the sample period
//halfT采样周期的一半
#define dt 0.008f
/***************************************************/
static float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f;
static float exInt = 0, eyInt = 0, ezInt = 0;
static short turns=0;
static float newdata=0.0f,olddata=0.0f;
static float pitchoffset,rolloffset,yawoffset;
static float k10=0.0f,k11=0.0f,k12=0.0f,k13=0.0f;
static float k20=0.0f,k21=0.0f,k22=0.0f,k23=0.0f;
static float k30=0.0f,k31=0.0f,k32=0.0f,k33=0.0f;
static float k40=0.0f,k41=0.0f,k42=0.0f,k43=0.0f;
float invSqrt(float number);
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az, float mx, float my, float mz,float *roll,float *pitch,float *yaw);
void CountTurns(float *newdata,float *olddata,short *turns);
void CalYaw(float *yaw,short *turns);
void CalibrateToZero(void);
int main(void)
{
u8 t=0;
float pitch,roll,yaw;
short igx,igy,igz;
short iax,iay,iaz;
short imx,imy,imz;
float gx,gy,gz;
float ax,ay,az;
float mx,my,mz;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
uart_init(9600); //串口初始化为9600
printf("1 ");
LED_Init(); //初始化与LED连接的硬件接口
t=MPU_Init();
// while (t)
// {
// printf("MPU_Init error\n\r ");
// delay_ms(200);
// printf("t=%d\n\r ",t);
// }
CalibrateToZero();
while(1)
{
MPU_Get_Gyro(&igx,&igy,&igz,&gx,&gy,&gz);
MPU_Get_Accel(&iax,&iay,&iaz,&ax,&ay,&az);
MPU_Get_Mag(&imx,&imy,&imz,&mx,&my,&mz);
AHRSupdate(gx,gy,gz,ax,ay,az,mx,my,mz,&roll,&pitch,&yaw);
printf("3 \n\r ");
olddata=newdata;
newdata=yaw;
CountTurns(&newdata,&olddata,&turns);
CalYaw(&yaw,&turns);
pitch+=pitchoffset;
roll+=rolloffset;
yaw+=yawoffset;
printf("%0.1f %0.1f %0.1f",roll,pitch,yaw);
printf("\r\n");
delay_us(5270);
}
}
/*//
*@功能:快速获得开方的倒数
*
*
///*/
float invSqrt(float number)
{
long i;
float x,y;
const float f=1.5f;
x=number*0.5f;
y=number;
i=*((long*)&y);
i=0x5f375a86-(i>>1);
y=*((float *)&i);
y=y*(f-(x*y*y));
return y;
}
/*//
*@功能:融合加速度计和磁力计进行姿态调整
*
*
///*/
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az, float mx, float my, float mz,float *roll,float *pitch,float *yaw)
{
float norm; //用于单位化
float hx, hy, hz, bx, bz; //
float vx, vy, vz, wx, wy, wz;
float ex, ey, ez;
// float tmp0,tmp1,tmp2,tmp3;
// auxiliary variables to reduce number of repeated operations 辅助变量减少重复操作次数
float q0q0 = q0*q0;
float q0q1 = q0*q1;
float q0q2 = q0*q2;
float q0q3 = q0*q3;
float q1q1 = q1*q1;
float q1q2 = q1*q2;
float q1q3 = q1*q3;
float q2q2 = q2*q2;
float q2q3 = q2*q3;
float q3q3 = q3*q3;
// normalise the measurements 对加速度计和磁力计数据进行规范化
norm = invSqrt(ax*ax + ay*ay + az*az);
ax = ax * norm;
ay = ay * norm;
az = az * norm;
norm = invSqrt(mx*mx + my*my + mz*mz);
mx = mx * norm;
my = my * norm;
mz = mz * norm;
// compute reference direction of magnetic field 计算磁场的参考方向
//hx,hy,hz是mx,my,mz在参考坐标系的表示
hx = 2*mx*(0.50 - q2q2 - q3q3) + 2*my*(q1q2 - q0q3) + 2*mz*(q1q3 + q0q2);
hy = 2*mx*(q1q2 + q0q3) + 2*my*(0.50 - q1q1 - q3q3) + 2*mz*(q2q3 - q0q1);
hz = 2*mx*(q1q3 - q0q2) + 2*my*(q2q3 + q0q1) + 2*mz*(0.50 - q1q1 -q2q2);
//bx,by,bz是地球磁场在参考坐标系的表示
bx = sqrt((hx*hx) + (hy*hy));
bz = hz;
// estimated direction of gravity and magnetic field (v and w) //估计重力和磁场的方向
//vx,vy,vz是重力加速度在物体坐标系的表示
vx = 2*(q1q3 - q0q2);
vy = 2*(q0q1 + q2q3);
vz = q0q0 - q1q1 - q2q2 + q3q3;
//wx,wy,wz是地磁场在物体坐标系的表示
wx = 2*bx*(0.5 - q2q2 - q3q3) + 2*bz*(q1q3 - q0q2);
wy = 2*bx*(q1q2 - q0q3) + 2*bz*(q0q1 + q2q3);
wz = 2*bx*(q0q2 + q1q3) + 2*bz*(0.5 - q1q1 - q2q2);
// error is sum ofcross product between reference direction of fields and directionmeasured by sensors
//ex,ey,ez是加速度计与磁力计测量出的方向与实际重力加速度与地磁场方向的误差,误差用叉积来表示,且加速度计与磁力计的权重是一样的
ex = (ay*vz - az*vy) + (my*wz - mz*wy);
ey = (az*vx - ax*vz) + (mz*wx - mx*wz);
ez = (ax*vy - ay*vx) + (mx*wy - my*wx);
// integral error scaled integral gain
//积分误差
exInt = exInt + ex*Ki*dt;
eyInt = eyInt + ey*Ki*dt;
ezInt = ezInt + ez*Ki*dt;
// printf("exInt=%0.1f eyInt=%0.1f ezInt=%0.1f ",exInt,eyInt,ezInt);
// adjusted gyroscope measurements
//PI调节陀螺仪数据
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
//printf("gx=%0.1f gy=%0.1f gz=%0.1f",gx,gy,gz);
// integrate quaernion rate aafnd normalaizle
//欧拉法解微分方程
// tmp0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
// tmp1 = q1 + ( q0*gx + q2*gz - q3*gy)*halfT;
// tmp2 = q2 + ( q0*gy - q1*gz + q3*gx)*halfT;
// tmp3 = q3 + ( q0*gz + q1*gy - q2*gx)*halfT;
// q0=tmp0;
// q1=tmp1;
// q2=tmp2;
// q3=tmp3;
//printf("q0=%0.1f q1=%0.1f q2=%0.1f q3=%0.1f",q0,q1,q2,q3);
RUNGE_KUTTA 法解微分方程
k10=0.5 * (-gx*q1 - gy*q2 - gz*q3);
k11=0.5 * ( gx*q0 + gz*q2 - gy*q3);
k12=0.5 * ( gy*q0 - gz*q1 + gx*q3);
k13=0.5 * ( gz*q0 + gy*q1 - gx*q2);
k20=0.5 * (halfT*(q0+halfT*k10) + (halfT-gx)*(q1+halfT*k11) + (halfT-gy)*(q2+halfT*k12) + (halfT-gz)*(q3+halfT*k13));
k21=0.5 * ((halfT+gx)*(q0+halfT*k10) + halfT*(q1+halfT*k11) + (halfT+gz)*(q2+halfT*k12) + (halfT-gy)*(q3+halfT*k13));
k22=0.5 * ((halfT+gy)*(q0+halfT*k10) + (halfT-gz)*(q1+halfT*k11) + halfT*(q2+halfT*k12) + (halfT+gx)*(q3+halfT*k13));
k23=0.5 * ((halfT+gz)*(q0+halfT*k10) + (halfT+gy)*(q1+halfT*k11) + (halfT-gx)*(q2+halfT*k12) + halfT*(q3+halfT*k13));
k30=0.5 * (halfT*(q0+halfT*k20) + (halfT-gx)*(q1+halfT*k21) + (halfT-gy)*(q2+halfT*k22) + (halfT-gz)*(q3+halfT*k23));
k31=0.5 * ((halfT+gx)*(q0+halfT*k20) + halfT*(q1+halfT*k21) + (halfT+gz)*(q2+halfT*k22) + (halfT-gy)*(q3+halfT*k23));
k32=0.5 * ((halfT+gy)*(q0+halfT*k20) + (halfT-gz)*(q1+halfT*k21) + halfT*(q2+halfT*k22) + (halfT+gx)*(q3+halfT*k23));
k33=0.5 * ((halfT+gz)*(q0+halfT*k20) + (halfT+gy)*(q1+halfT*k21) + (halfT-gx)*(q2+halfT*k22) + halfT*(q3+halfT*k23));
k40=0.5 * (dt*(q0+dt*k30) + (dt-gx)*(q1+dt*k31) + (dt-gy)*(q2+dt*k32) + (dt-gz)*(q3+dt*k33));
k41=0.5 * ((dt+gx)*(q0+dt*k30) + dt*(q1+dt*k31) + (dt+gz)*(q2+dt*k32) + (dt-gy)*(q3+dt*k33));
k42=0.5 * ((dt+gy)*(q0+dt*k30) + (dt-gz)*(q1+dt*k31) + dt*(q2+dt*k32) + (dt+gx)*(q3+dt*k33));
k43=0.5 * ((dt+gz)*(q0+dt*k30) + (dt+gy)*(q1+dt*k31) + (dt-gx)*(q2+dt*k32) + dt*(q3+dt*k33));
q0=q0 + dt/6.0 * (k10+2*k20+2*k30+k40);
q1=q1 + dt/6.0 * (k11+2*k21+2*k31+k41);
q2=q2 + dt/6.0 * (k12+2*k22+2*k32+k42);
q3=q3 + dt/6.0 * (k13+2*k23+2*k33+k43);
// normalise quaternion
norm = invSqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 * norm;
q1 = q1 * norm;
q2 = q2 * norm;
q3 = q3 * norm;
*pitch = asin(-2 * q1 * q3 + 2 * q0 * q2)* 57.3; // pitch
*roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2 * q2 + 1)* 57.3; // roll
*yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw
}
/*//
*@功能:计算水平方向转的圈数
*
*
///*/
void CountTurns(float *newdata,float *olddata,short *turns)
{
if (*newdata<-170.0f && *olddata>170.0f)
(*turns)++;
if (*newdata>170.0f && *olddata<-170.0f)
(*turns)--;
}
/*//
*@功能:计算偏航角
*
*
///*/
void CalYaw(float *yaw,short *turns)
{
*yaw=360.0**turns+*yaw;
}
/*//
*@功能:补偿欧拉角偏移,主要补偿yaw角
*
*
///*/
void CalibrateToZero(void)
{
u8 t=0;
float sumpitch=0,sumroll=0,sumyaw=0;
float pitch,roll,yaw;
short igx,igy,igz;
short iax,iay,iaz;
short imx,imy,imz;
float gx,gy,gz;
float ax,ay,az;
float mx,my,mz;
for (t=0;t<150;t++)
{
MPU_Get_Gyro(&igx,&igy,&igz,&gx,&gy,&gz);
MPU_Get_Accel(&iax,&iay,&iaz,&ax,&ay,&az);
MPU_Get_Mag(&imx,&imy,&imz,&mx,&my,&mz);
AHRSupdate(gx,gy,gz,ax,ay,az,mx,my,mz,&roll,&pitch,&yaw);
delay_us(6430);
if (t>=100)
{
sumpitch+=pitch;
sumroll+=roll;
sumyaw+=yaw;
}
}
pitchoffset=-sumpitch/50.0f;
rolloffset=-sumroll/50.0f;
yawoffset=-sumyaw/50.0f;
}
2.程序链接
链接:https://pan.baidu.com/s/19tSTw2x0utACXVRnlFkbww
提取码:ixvp
————————————————————————————
二.BMP280
不知道为为什么,3个BMP读取的值都不一样,我觉得应该是硬件问题!
文章目录
1.调试程序时,可以在不同地方设置printf();看运行状况;
2.
/*s32—int32_t
*u32 —uint32_t
*
运行结果:
压强:南京这边是101200pa
温度:2772,代表是27.72C

1.主程序
//PA6----SCL
//PA7---SDA
/*s32---int32_t
*u32 ---uint32_t
*
*
#include "sys.h"
#include "usart.h
#include "bmpiic.h"
#include "bm280.h"
int main(void)
{
s32 bmp280_temp;
u32 bmp280_press;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(9600); //串口初始化为500000
delay_init(); //延时初始化
BMP280_Init();
while(1)
{
BMP280_ReadPressureTemperature(&bmp280_press,&bmp280_temp); //bmp280获取气压值和温度
printf("\r\nTemperatureU %u C PressureU %u Pa",bmp280_temp,bmp280_press);
printf("\r\nTemperatureD %d C PressureD %u Pa",bmp280_temp,bmp280_press);
delay_ms(1000);
}
}
运行结果:
压强:南京这边是101200pa
温度:2772,代表是27.72C

2.程序
链接:https://pan.baidu.com/s/19RWZ6nZxWWw2dUhPZf8zJA
提取码:kbl7















 1754
1754











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









