






YOLOv8 训练 OSDaR23 数据集
文章目录
YOLOv8 & OSDaR23 介绍
参考这两个链接:
YOLOv8 深度详解
轨道交通数据集-OSDaR23: Open Sensor Data for Rail 2023
YOLOv8 源码
源码链接:https://github.com/ultralytics/ultralytics
相关部署和环境配置参考该链接:完整且详细的Yolov8复现+训练自己的数据集
OSDaR 数据集处理
1. 下载链接
因为这个数据集下载需要翻墙,然后下载那边的数据集,速度很慢,而且如果网络不好还会一直断联,因此此处俺将自己下载好的数据集链接放在百度网盘里面,需要的可以自行下载。不过这个数据集究极大,所以一定要用百度网盘的会员来下载。(看在作者这么无私的份上给个免费的赞吧)
链接: https://pan.baidu.com/s/1cWrnteEf-6vgsXawiqL4-w?pwd=yjnu 提取码: yjnu
2. 了解 YOLOv8 数据集格式
首先要了解 YOLOv8 所需要的数据集格式,可以看下面这个树状图
- datasets
- images
- train
- valid
- test
- labels
- train
- valid
- test
- images
这个就是 YOLOv8 数据集的分布,不过我在做这次的数据集的时候没有添加 test 部分的文件夹(对结果没啥影响)。
3. 处理 OSDaR23 数据集
下载好数据集后,打开文件夹可以发现里面有好多个文件夹,但是如果是用于图像检测的 YOLOv8 来说,使用这 6 个文件夹即可。同时,每个文件夹里面的标签文件都放在同一个 .json 文件下面。所以这个标签文件非常巨大,内容及其难读取。
下面是我根据标签文件里面的内容读取一个图片的标注框的代码,可以进行参考。
在这里插入代码片
正式开始处理数据集。
先将处理数据集的代码与所有文件夹放在同一个文件夹下面,如下图所示(dataset.py)。yolo_dataset 为最后生成的数据集文件(一共 107.3 GB,简直离谱!!!)。

生成数据集的代码如下:
大部分代码都有注释,想细看的可以自己逐步分析,里面还有一部分数据增强环节,不过因为增强部分太过耗时,因此被注释掉了,在本人实际使用时并未打开(想开的兄弟可以自行打开)。运行完毕即可生成名为 yolo_dataset 的数据集。
不过因为数据集里面有一些图像实际是没有标注内容的,因此理论上其对应的 txt 文件应该为空文件,但时当时写代码的时候没注意到,导致空文件没有生成,而图片数量比实际对应的标签文件数量多了一些。针对这个问题,删除多余的图片即可。
# import raillabel
import json
import cv2
import os
import shutil
import random
import numpy as np
dirt_yaml = {
'person': 0, 'bicycle': 1, 'road_vehicle': 2, 'motorcycle': 3,
'crowd': 4, 'group_of_bicycles': 5, 'train': 6, 'wagons': 7,
'animal': 8, 'group_of_animals': 9, 'wheelchair': 10, 'drag_shoe': 11,
'track': 12, 'transition': 13, 'switch': 14, 'catenary_pole': 15,
'signal_pole': 16, 'signal': 17, 'signal_bridge': 18, 'buffer_stop': 19,
'flame': 20, 'smoke': 21
}
# 定义要遍历的文件夹列表
rgb_folder_list = ["rgb_center", "rgb_left", "rgb_right",
"rgb_highres_center", "rgb_highres_left", "rgb_highres_right"]
home_path = os.getcwd() # /home/be/Desktop/Train_Image_Dataset 主目录
print(home_path)
yolo_path = './yolo_dataset/' # yolo 数据集路径
yolo_image_path = yolo_path + 'image/'
yolo_image_train_path = yolo_image_path + 'train/'
yolo_image_valid_path = yolo_image_path + 'valid/'
yolo_label_path = yolo_path + 'label/'
yolo_label_train_path = yolo_label_path + 'train/'
yolo_label_valid_path = yolo_label_path + 'valid/'
train_ratio = 0.8 # 分配比例
valid_ratio = 0.2
# 遍历所有子文件夹里面的 6 个 rgb 图像文件夹,将每个文件夹里面的图像路径按照 8:2 随机分配到数据集的 train 和 valid
train_paths = []
valid_paths = []
def make_dirs():
if os.path.exists(yolo_path):
print("文件夹已存在!")
shutil.rmtree(yolo_path)
os.mkdir(yolo_path)
os.makedirs(yolo_image_path)
os.makedirs(yolo_image_train_path)
os.makedirs(yolo_image_valid_path)
os.makedirs(yolo_label_path)
os.makedirs(yolo_label_train_path)
os.makedirs(yolo_label_valid_path)
# 将文件夹里面的所有子文件的所有图片进行存储
def random_shuffle():
for sub_folder in os.listdir(home_path):
sub_folder_path = os.path.join(home_path, sub_folder)
for folder in rgb_folder_list:
sub_sub_folder_path = os.path.join(sub_folder_path, folder)
if not os.path.exists(sub_sub_folder_path):
continue
current_folder_images = []
for file_name in os.listdir(sub_sub_folder_path):
file_path = os.path.join(sub_sub_folder_path, file_name)
current_folder_images.append(file_path)
random.shuffle(current_folder_images)
split_index = int(4 * len(current_folder_images) / 5)
train_paths.extend(current_folder_images[:split_index])
valid_paths.extend(current_folder_images[split_index:])
print(len(train_paths), train_paths)
print(len(valid_paths), valid_paths)
def transfer():
n = 0 # 统计现在向数据集移动了多少个图像
# 将标签文件的内容转换成需要用到的 txt
for folder_name in os.listdir(home_path):
if not os.path.isdir(folder_name): # 先跳过 dataset.py
continue
# 首先筛掉不是数据的文件夹
sub_folder_path = os.path.join(home_path, folder_name)
# 检查子文件夹中是否存在 JSON 文件
json_found = False
json_file = ''
for item in os.listdir(sub_folder_path):
if item.endswith('.json'):
json_found = True
json_file = item
break
if json_found:
print("当前子文件夹中存在 JSON 文件。")
else:
continue
sub_json_path = os.path.join(sub_folder_path, json_file)
print("当前数据文件夹: ", folder_name)
print("当前文件夹路径: ", sub_folder_path)
print("当前文件夹标签文件路径: ", sub_json_path)
# 读取文件夹对应的 json 文件
with open(sub_json_path, 'r') as data_file:
scene = json.load(data_file)
frames = scene['openlabel']['frames']
# 遍历每一帧 frame
for frame, frame_value in frames.items():
print('current frame ================================================================================'+\
'======================================================================================: ', frame)
for properties_or_objects, _value in frame_value.items():
print('properties_or_objects==============================================:', properties_or_objects)
# 获取图片和对应的时间戳
if properties_or_objects == 'frame_properties':
streams_value = _value['streams']
for key_folder, image_path in streams_value.items():
original_image_path = sub_folder_path + image_path['uri']
# 排除不是 rgb 的图像
if 'ir' in image_path['uri'] or 'lidar' in image_path['uri'] or 'radar' in image_path['uri']:
continue
# 确定图像是否存在
if not os.path.exists(original_image_path):
print('error')
break
# 判断图像属于 train 还是 valid
# 在传输图像的时候顺便进行变亮的增强处理,扩充一倍的数据集
if judge_train_valid(original_image_path) == 'train':
# 读取当前路径下面的图片然后复制到数据集的路径下面
shutil.copy(original_image_path, yolo_image_train_path)
old_image_name = yolo_image_train_path + image_path['uri'].split("/")[-1]
new_image_name = yolo_image_train_path + folder_name + '_' + key_folder + '_' + image_path['uri'].split("/")[-1].split("_")[0] + '.png'
os.rename(old_image_name, new_image_name)
# # 图像增强并另存为 _2 版本
# pre_image = cv2.imread(new_image_name)
# done_image = brighter(pre_image)
# cv2.imwrite(yolo_image_train_path + folder_name + '_' + key_folder + '_' + image_path['uri'].split("/")[-1].split("_")[0] + '_2' + '.png', done_image)
elif judge_train_valid(original_image_path) == 'valid':
shutil.copy(original_image_path, yolo_image_valid_path)
old_image_name = yolo_image_valid_path + image_path['uri'].split("/")[-1]
new_image_name = yolo_image_valid_path + folder_name + '_' + key_folder + '_' + image_path['uri'].split("/")[-1].split("_")[0] + '.png'
os.rename(old_image_name, new_image_name)
# # 图像增强并另存为 _2 版本
# pre_image = cv2.imread(new_image_name)
# done_image = brighter(pre_image)
# cv2.imwrite(yolo_image_valid_path + folder_name + '_' + key_folder + '_' + image_path['uri'].split("/")[-1].split("_")[0] + '_1' + '.png', done_image)
n += 1
print(n)
# 获取标签文件 txt 的信息
if properties_or_objects == 'objects':
for key_object_data, value_object_data in _value.items():
for key, value in value_object_data.items():
for key_bbox, value_bbox in value.items():
# 不属于 bbox 的数据,例如 poly2d 直接跳过
if key_bbox == 'bbox':
for value_bbox_i in value_bbox:
# 开始判断单个 bbox 的数据对应的种类以及所属的图片的文件夹
# 获取图片的尺寸并计算框的距离比例
if value_bbox_i['coordinate_system'] in rgb_folder_list:
# 获取 bbox 对应目标物体的种类
class_name = value_bbox_i['name'].split('__')[-1]
class_index = dirt_yaml[class_name]
print(value_bbox_i['name'], ' ', class_name, ': ', class_index)
image_h = 0
image_w = 0
frame_current_path = ''
# 标签文件命名(文件夹_摄像机文件夹_第几帧)
formatted_frame = '{:0>3}'.format(frame)
new_txt_name = folder_name + '_' + value_bbox_i[
'coordinate_system'] + '_' + formatted_frame + '.txt'
find_image_ = formatted_frame + '_'
# 此处循环只为找到获得 bbox 对应图片并获得 高宽 尺寸数据,然后计算出 bbox 的数据
bbox_folder = os.path.join(sub_folder_path, value_bbox_i['coordinate_system'])
for image_name in os.listdir(bbox_folder):
if find_image_ in image_name:
frame_current_path = os.path.join(bbox_folder, image_name)
frame_current_file = cv2.imread(frame_current_path)
image_h, image_w, c = frame_current_file.shape # 这个没有问题
txt_bbox = to_yolo(value_bbox_i['val'], image_h, image_w)
txt_str = str(class_index) + ' ' + str(
' '.join(str(element) for element in txt_bbox)) + '\n'
print(frame_current_path)
# 判断标签文件是 train 还是 valid
if judge_train_valid(frame_current_path) == 'train':
txt_path = os.path.join(yolo_label_train_path,
new_txt_name)
with open(txt_path, 'a') as txt_file:
txt_file.write(txt_str)
txt_file.close()
elif judge_train_valid(frame_current_path) == 'valid':
txt_path = os.path.join(yolo_label_valid_path,
new_txt_name)
with open(txt_path, 'a') as txt_file:
txt_file.write(txt_str)
txt_file.close()
print(value_bbox_i['name'], ' ', 'h: ', image_h, 'w: ', image_w)
print(txt_str)
print(n)
print()
else:
continue
def to_yolo(bbox, image_h, image_w):
# 四个数据分别为: 中心点_x、中心点_y、检测框_宽、检测框_高
return [bbox[0] / image_w, bbox[1] / image_h, bbox[2] / image_w, bbox[3] / image_h]
def judge_train_valid(path):
if path in train_paths:
return 'train'
if path in valid_paths:
return 'valid'
# 亮度
# def brighter(image, percetage=1.3):
# image_copy = image.copy()
# w = image.shape[1]
# h = image.shape[0]
# # get brighter
# for xi in range(0, w):
# for xj in range(0, h):
# image_copy[xj, xi, 0] = np.clip(int(image[xj, xi, 0] * percetage), a_max=255, a_min=0)
# image_copy[xj, xi, 1] = np.clip(int(image[xj, xi, 1] * percetage), a_max=255, a_min=0)
# image_copy[xj, xi, 2] = np.clip(int(image[xj, xi, 2] * percetage), a_max=255, a_min=0)
# return image_copy
if __name__ == '__main__':
make_dirs()
random_shuffle()
transfer()
其实就是读取文件夹里面的图片名字,然后提换成对应的 txt 文件名,然后在 labels 文件夹里面找,是否存在对应的 txt 文件,如果没有就创建一个空的 txt 文件或者把这个图片删除。
最后的结果如下所示,其中一个 txt 文件:
YOLOv8 训练
编写 yolo_dataset.yaml 训练文件,内容如下
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: /home/be/Desktop/T_I_Dataset/yolo_dataset # dataset root dir
train: images/train # train images (relative to 'path') 4 images
val: images/valid # val images (relative to 'path') 4 images
test: # test images (optional)
# Classes
names:
0: person
1: bicycle
2: road_vehicle
3: motorcycle
4: crowd
5: group_of_bicycles
6: train
7: wagons
8: animal
9: group_of_animals
10: wheelchair
11: drag_shoe
12: track
13: transition
14: switch
15: catenary_pole
16: signal_pole
17: signal
18: signal_bridge
19: buffer_stop
20: flame
21: smoke
最后在 YOLOv8 终端部分输入命令:yolo detect train data=yolo_dataset.yaml model=yolov8n.yaml epochs=300 imgsz=640
温情提示:这个数据集很大,训练时间很久,如果可以,尽量使用 GPU 训练,对应命令为 yolo detect train data=yolo_dataset.yaml model=yolov8n.yaml epochs=300 imgsz=640 device=0,但是即便如此依旧时间很久。最好有超算的话,用超算可以节省很多时间。
这么說,我在并行超算平台训练这个数据集, 300轮,使用了 8 张卡,依旧接近 10 个小时。emmmmmmmm,所以,你懂的。
使用权重文件进行预测以及生成结果视频
使用权重文件进行预测,可以使用命令
“ 记得修改文件的路径 ”
yolo detect predict model=/{pwd}/best.pt source=/{pwd}/yolo_dataset/images/valid
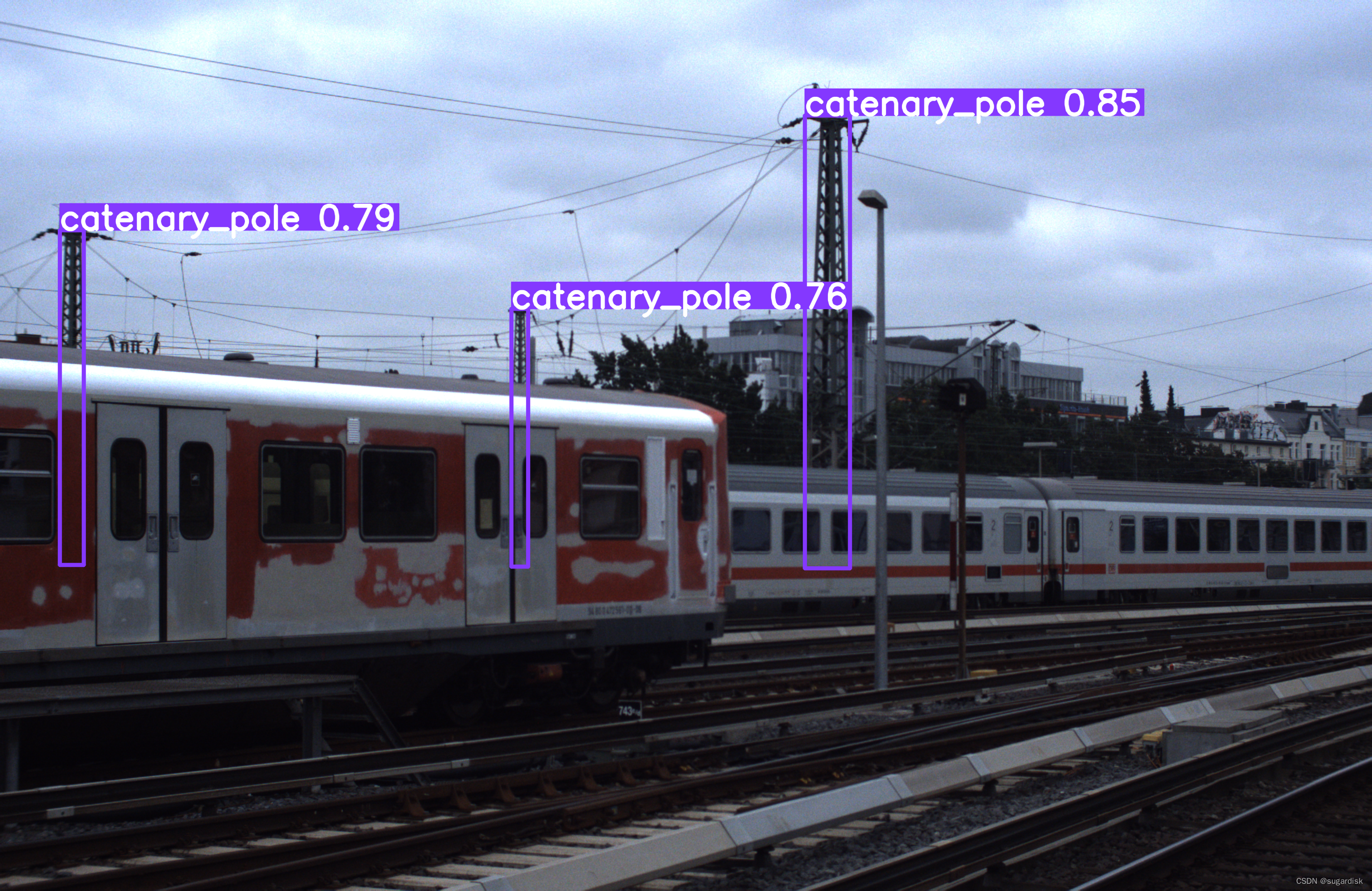
可以得到一系列结果图,例如下图:
使用生成的结果进行视频制作
代码如下:
from PIL import Image
import cv2
import os
import numpy as np
class_dict = {
'0': 'person',
'1': 'bicycle',
'2': 'road_vehicle',
'3': 'motorcycle',
'4': 'crowd',
'5': 'group_of_bicycles',
'6': 'train',
'7': 'wagons',
'8': 'animal',
'9': 'group_of_animals',
'10': 'wheelchair',
'11': 'drag_shoe',
'12': 'track',
'13': 'transition',
'14': 'switch',
'15': 'catenary_pole',
'16': 'signal_pole',
'17': 'signal',
'18': 'signal_bridge',
'19': 'buffer_stop',
'20': 'flame',
'21': 'smoke'
}
# 定义目标宽度
target_width = 1000
# 帧率
frame_rate = 1
video_name = '/{pwd}/test.mp4'
# 创建视频写入对象
fourcc = cv2.VideoWriter_fourcc(*'mp4v') # 使用 MPEG-4 编解码器(对应字符串为 'mp4v')
video = cv2.VideoWriter(video_name, fourcc, frame_rate, (2000, 1298))
source_images_path = '/{pwd}/images/valid' # 存放原测试部分的图像
source_labels_path = '/{pwd}/labels/valid' # 存放原测试部分的标签文件
predict_images_path = '/{pwd}/runs/detect/train_predict' # 存放已经进行 predict 的图片
for pre_image in os.listdir(predict_images_path):
# 分别获得图片对应的路徑
s_image_path = os.path.join(source_images_path, pre_image)
s_label_path = os.path.join(source_labels_path, pre_image.replace('.png', '.txt'))
p_image_path = os.path.join(predict_images_path, pre_image)
# 检查这个文件路径是否正确
if not os.path.exists(s_label_path) or not os.path.exists(s_image_path) or not os.path.exists(p_image_path):
print("文件路径不匹配")
break
# 读取图像
s_image = cv2.imread(s_image_path)
p_image = cv2.imread(p_image_path)
image_h, image_w, c = p_image.shape
# 创建一个用于标注的图像
clone_s_image = np.copy(s_image)
# 创建一个空白的画板
blank_image = np.ones((image_h, image_w, 3), np.uint8) * 0
# 对原图像进行标签标注
with open(s_label_path, 'r') as file:
for line in file:
class_bbox = line.split(' ')
label_class = class_dict[class_bbox[0]]
bbox = [int(float(class_bbox[1]) * image_w), int(float(class_bbox[2]) * image_h), # 中心点位置,检测框宽高
int(float(class_bbox[3]) * image_w), int(float(class_bbox[4].split('\n')[0]) * image_h),]
# 计算矩形的左上角和右下角坐标
top_left = (int(bbox[0] - bbox[2] / 2), int(bbox[1] - bbox[3] / 2))
bottom_right = (int(bbox[0] + bbox[2] / 2), int(bbox[1] + bbox[3] / 2))
# 画检测框
clone_s_image = cv2.rectangle(clone_s_image, top_left, bottom_right, color=(0, 255, 0), thickness=2)
blank_image = cv2.rectangle(blank_image, top_left, bottom_right, color=(0, 255, 0), thickness=2)
# 计算缩放比例
scale_percent = target_width / image_w
width = target_width
height = int(image_h * scale_percent)
dim = (width, height)
print(dim)
org = cv2.FONT_HERSHEY_SIMPLEX
# 缩放图像,并打上标签并拼接
resized_s_image = cv2.resize(s_image, dim, interpolation=cv2.INTER_LINEAR)
resized_s_image = cv2.putText(resized_s_image, 'source image', (10, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255),
1)
resized_blank_image = cv2.resize(blank_image, dim, interpolation=cv2.INTER_LINEAR)
resized_blank_image = cv2.putText(resized_blank_image, 'label image', (10, 50), cv2.FONT_HERSHEY_SIMPLEX, 1,
(0, 0, 255), 1)
resized_clone_image = cv2.resize(clone_s_image, dim, interpolation=cv2.INTER_LINEAR)
resized_clone_image = cv2.putText(resized_clone_image, 'test image', (10, 50), cv2.FONT_HERSHEY_SIMPLEX, 1,
(0, 0, 255), 1)
resized_p_image = cv2.resize(p_image, dim, interpolation=cv2.INTER_LINEAR)
resized_p_image = cv2.putText(resized_p_image, 'predict image', (10, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255),
1)
# 水平拼接两张图片
combined_1_image = np.hstack((resized_s_image, resized_blank_image))
combined_2_image = np.hstack((resized_clone_image, resized_p_image))
# 垂直拼接两张图片
concatenated_image = np.vstack((combined_1_image, combined_2_image))
h, w, c = concatenated_image.shape
print(h, w)
# 向视频中插入图片帧
video.write(concatenated_image)
# 释放资源
cv2.destroyAllWindows()
video.release()
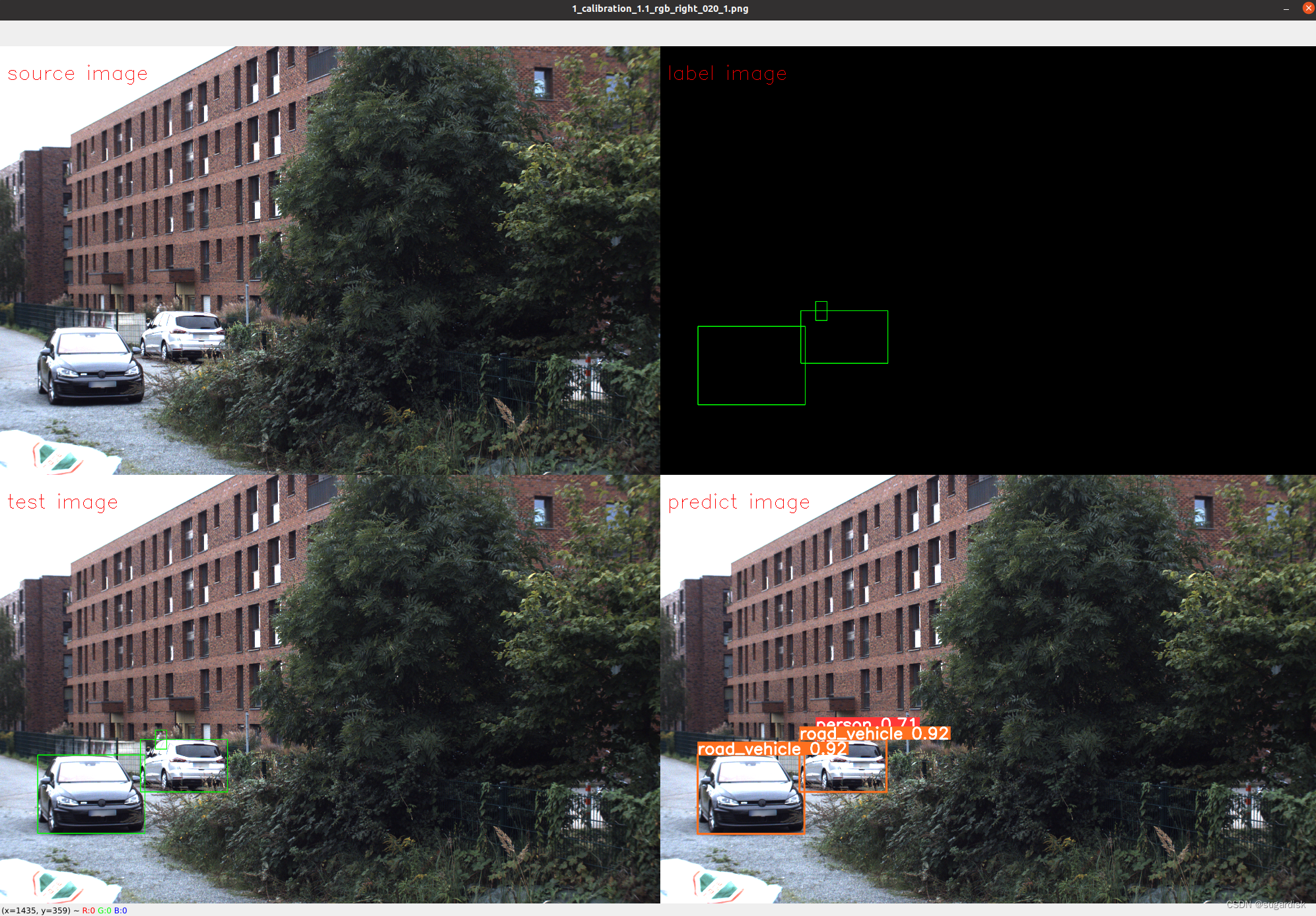
测试的图片效果如下所示:
生成的视频结果如下:
OSDaR23预测视频

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









