






一、清华园镜像地址
-i https://pypi.tuna.tsinghua.edu.cn/simple
二、ubuntu系统快捷按键
PrtSc – 获取整个屏幕的截图并保存到 Pictures 目录。
Shift + PrtSc – 获取屏幕的某个区域截图并保存到 Pictures 目录。
Alt + PrtSc –获取当前窗口的截图并保存到 Pictures 目录。
Ctrl + PrtSc – 获取整个屏幕的截图并存放到剪贴板。
Shift + Ctrl + PrtSc – 获取屏幕的某个区域截图并存放到剪贴板。
Ctrl + Alt + PrtSc – 获取当前窗口的 截图并存放到剪贴板。
ctrl + Alt + PrtSc – 获取当前窗口的 截图并存放到剪贴板。
ctrl+alt+shift+R -- 快捷键录制屏幕
三、ros(机器人操作系统)安装
简单快速好用的方法:csdn搜索 鱼香肉丝一键安装。
1、测试是否安装成功
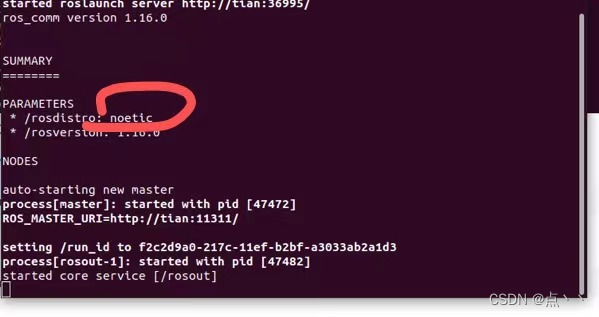
1、在终端中输入以下命令,对ros环境初始化,激活ros的核心管理。
roscore打开后如图所示,并且我们可以查看到ros版本
2、打开一个新的终端(Termial),输入以下命令会弹出一个乌龟的窗口:
rosrun turtlesim turtlesim_node
3、再打开一个新的终端,输入以下命令:
rosrun turtlesim turtle_teleop_key
通过方向键我们可以控制小乌龟的移动
4、打开新的终端,输入以下命令可以查看ROS节点信息:
rosrun rqt_graph rqt_graph
5、补充:对于机器人的开发我们会用到很多硬件传感器设备,每一个设备都会有相应的节点,我们可以用上边方法查看。对于一个整体的机器人用到多个传感器的整体,我们也可以用tf树来进行查看,输入以下指令:
rosrun tf_tree tf_tree我们可以看到整颗tf树,从中我们可以查找以后实践中的通讯问题来进行解决。
四、终端(Termial)中快捷按键(ubuntu系统中使用)
1、打开方式
ubuntu系统中:ctrl+alt+t打开终端 / 也可以鼠标右键打开
windows系统中:我们点开任务栏中的“搜索”,输入“cmd”,打开命令窗口。(在命令窗口用nvidia-smi 命令可以查看GPU驱动版本。)
2、终端指令
ls:当前路径下的文件清单 mkdir+文件名词:创建新的目录文件 cd+文件名:改变当前目录/进入目录
cd .. 返回上一级文件目录 cd ~ 返回主文件夹目录下 tab 指令补全功能(指令唯一情况下)
gedit+文件名 :对文件进行打开编辑 source+文件名称:执行文件中的指令序列
~/.bashrc :终端程序启动脚本 ls -a: 查看所有文件
roscore: 启动ros核心 终端修改配置文件:
1、gedit ~/.bashrc 打开终端配置文件。
2、source ~/.bashrc 保存退出,在终端输入source ~/.bashrc重新加载配置文件,使修改的内容生效。
五、补充
ros的软件包应用商店:index.ros.org















 488
488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









