






 本文介绍了舵机的基本概念,重点讲述了如何通过C++代码在Arduino上控制舵机进行0~90°的来回转动,并附有接线图和仿真模拟过程。
本文介绍了舵机的基本概念,重点讲述了如何通过C++代码在Arduino上控制舵机进行0~90°的来回转动,并附有接线图和仿真模拟过程。
目 录
1. 舵机简介
舵机是一种位置(角度)伺服的驱动器。舵机只是一种通俗的叫法,其实质是一个伺服马达。在需要角度不断变化并可以保持的控制系统中应用广泛。如遥控机械人、飞机模型等。
舵机的转动角度为0~180°,其内部结构包括电机,控制电路和机械结构三部分。电机有三根线引出,分别接VCC、GNG和信号线。主要有两种引出线的格式:
棕(黑)、红、橙(棕色连接GND、红色连接VCC、橙色连接信号);
图1 舵机实物图

2 项目:舵机来回转动
实现功能:舵机0~90°来回转动。
3 代码
// C++ code
//
#include <Servo.h>
Servo servo_9;
void setup()
{
servo_9.attach(9, 500, 2500);
}
void loop()
{
while (1 == 1) {
servo_9.write(0);
delay(1000); // Wait for 1000 millisecond(s)
servo_9.write(90);
delay(1000); // Wait for 1000 millisecond(s)
}
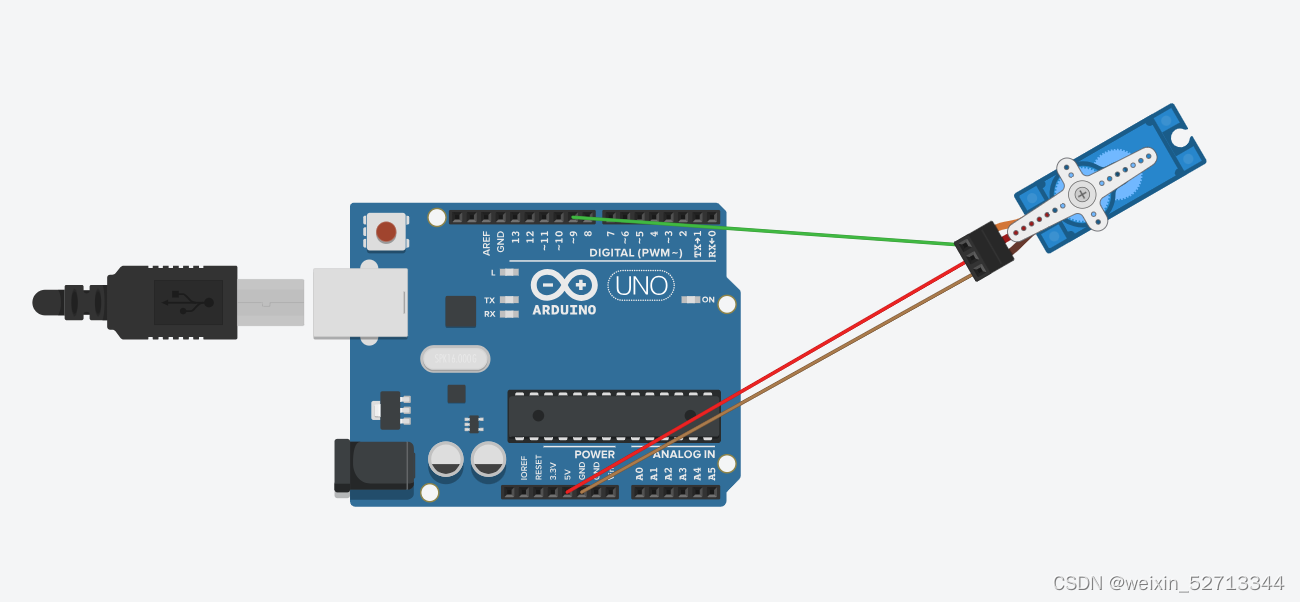
}九号针脚
接线图:
4 仿真模拟
arduino控制舵机仿真视频
// C++ code
//
#include <Servo.h>
Servo servo_9;
void setup()
{
servo_9.attach(9, 500, 2500);
}
void loop()
{
while (1 == 1) {
servo_9.write(0);
delay(1000); // Wait for 1000 millisecond(s)
servo_9.write(90);
delay(1000); // Wait for 1000 millisecond(s)
}
}














 2100
2100











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









