






文章目录
硬盘坏了,项目没了/(ㄒoㄒ)/~~幸好记录了一些步骤
一、前置知识
1.1 变换矩阵
位置是相对的,必须先确定参考系,才能描述物体的位置。我们将定义的第一个坐标系称为参考坐标系,其他的坐标系都是相对于这个参考坐标系来描述的。从参考坐标系转换到其他坐标系上的转换关系矩阵叫变换矩阵,变换矩阵是连接两个坐标系的桥梁。具体来说,变换矩阵T是由两部分组成:旋转矩阵R和平移矩阵t。旋转矩阵R负责处理坐标系之间的旋转关系,而平移矩阵t则负责处理坐标系之间的平移关系。通过变换矩阵,我们能够准确地将物体从一个坐标系转换到另一个坐标系。
下面举出一个例子,定义蓝色的坐标系为参考坐标系,绿色的坐标系为目标坐标系,红色的点表示空间中的一个物体。首先确定旋转矩阵R,z轴绕负方向旋转了90度,其余轴都没有进行旋转,则
R
=
[
0
−
1
0
0
1
0
0
0
0
0
1
0
0
0
0
1
]
R=\begin{bmatrix}0&-1&0&0\\1&0&0&0\\0&0&1&0\\0&0&0&1\end{bmatrix}
R=
0100−100000100001
,再确定平移矩阵t,x轴正向平移1单位,y轴正向平移6单位,z轴正向平移2单位,
t
=
[
1
0
0
1
0
1
0
6
0
0
1
2
0
0
0
1
]
t=\begin{bmatrix}1&0&0&1\\0&1&0&6\\0&0&1&2\\0&0&0&1\end{bmatrix}
t=
1000010000101621
,则从参考坐标系转换到目标坐标系的变换矩阵
T
=
[
0
−
1
0
6
1
0
0
−
1
0
0
1
−
2
0
0
0
1
]
T=\begin{bmatrix}0&-1&0&6\\1&0&0&-1\\0&0&1&-2\\0&0&0&1\end{bmatrix}
T=
0100−100000106−1−21
。物体在参考坐标系的坐标位置是
P
=
(
3
,
2
,
4
)
P=(3,2,4)
P=(3,2,4),如果要变换到目标坐标系则左乘变换矩阵T,将得到物体在目标坐标系的位置
P
=
(
4
,
2
,
2
)
P=(4,2,2)
P=(4,2,2)。

参考:旋转矩阵R、平移向量t以及变换矩阵T的定义及其下标的含义。
1.2 旋转矩阵
向量的旋转一共有三种表示方法:旋转矩阵、欧拉角和四元数。因此可以用计算旋转(旋转矩阵、欧拉角、四元数、旋转向量)+平移(平移矩阵、平移向量)的8种排列组合来表示变换矩阵,旋转矩阵+平移矩阵是表示变换矩阵最直接的,但其中的数值无法直观的体现出来,因此需要借助欧拉角表示旋转矩阵。欧拉角的计算要区分左右手坐标系以及旋转顺序,在unity中使用的是左手坐标系yxz的顺序。unity中物体的旋转用的是transform.Rotate函数,传入参数的是角度,因此欧拉角转旋转矩阵的代码如下:
Matrix4x4 eulerAnglesToRotationMatrix(Vector3 eulerAngles)
{
double rx = eulerAngles.x / 180.0 * Math.PI;
double ry = eulerAngles.y / 180.0 * Math.PI;
double rz = eulerAngles.z / 180.0 * Math.PI;
Matrix4x4 Rx = new Matrix4x4(new Vector4(1f, 0f, 0f, 0f), new Vector4(0f, (float)Math.Cos(rx), (float)Math.Sin(rx), 0f), new Vector4(0f, -(float)Math.Sin(rx), (float)Math.Cos(rx), 0f), new Vector4(0f, 0f, 0f, 1f));
Matrix4x4 Ry = new Matrix4x4(new Vector4((float)Math.Cos(ry), 0f, -(float)Math.Sin(ry), 0f), new Vector4(0f, 1f, 0f, 0f), new Vector4((float)Math.Sin(ry), 0f, (float)Math.Cos(ry), 0f), new Vector4(0f, 0f, 0f, 1f));
Matrix4x4 Rz = new Matrix4x4(new Vector4((float)Math.Cos(rz), (float)Math.Sin(rz), 0f, 0f), new Vector4(-(float)Math.Sin(rz), (float)Math.Cos(rz), 0f, 0f), new Vector4(0f, 0f, 1f, 0f), new Vector4(0f, 0f, 0f, 1f));
return Ry * Rx * Rz;
}
四元数转旋转矩阵的代码如下:
Matrix4x4 quaternionToRotationMatrix(Quaternion quaternion)
{
Matrix4x4 result = new Matrix4x4();
double w = quaternion.w;
double rx = quaternion.x;
double ry = quaternion.y;
double rz = quaternion.z;
result.m00 = (float)(1 - 2 * ry * ry - 2 * rz * rz);
result.m01 = (float)(2 * rx * ry - 2 * w * rz);
result.m02 = (float)(2 * rx * rz + 2 * w * ry);
result.m10 = (float)(2 * rx * ry + 2 * w * rz);
result.m11 = (float)(1 - 2 * rx * rx - 2 * rz * rz);
result.m12 = (float)(2 * ry * rz - 2 * w * rx);
result.m20 = (float)(2 * rx * rz - 2 * w * ry);
result.m21 = (float)(2 * ry * rz + 2 * w * rx);
result.m22 = (float)(1 - 2 * rx * rx - 2 * ry * ry);
result.m33 = 1;
return result;
}
参考:彻底搞懂“旋转矩阵/欧拉角/四元数”,让你体会三维旋转之美。
1.3 欧拉角
旋转矩阵转欧拉角的代码如下:
Vector3 rotationMatrixToEulerAngles(Matrix4x4 T)
{
float rx = (float)(Math.Asin(-T.m12));
float ry = (float)(Math.Atan2(T.m02, T.m22));
float rz = (float)(Math.Atan2(T.m10, T.m11));
return new Vector3(rx, ry, rz);
}
四元数转欧拉角的代码如下:
var eulerAngles = rotation.eulerAngles;
1.4 四元数
旋转矩阵转四元数的代码如下:
var rotation = Quaternion.Euler(rotationMatrixToEulerAngles(T));
欧拉角转四元数的代码如下:
var rotation = Quaternion.Euler(eulerAngles);
二、unity搭建机械臂
2.1 下载机械臂模型
unity导入的模型需要fbx格式,下载下来的是step格式,需要使用软件(如3dsmax)进行转换。将模型导入后看到模型部件的名称是乱码,且有层级关系,我们修改对应的名称并且不需要这种层级关系。创建14个空物体分别命名为机械臂、组件1-7、关节1-6,所有空物体的初始位置要在(0,0,0),并把模型部件移动到对应的组件下,如图所示。

参考:资料下载。
2.2 确定用于动画的旋转坐标系
把关节的初始位置设置在关节的圆形切面的中心位置,如图所示。

参考:unity制作机械臂。
2.3 关节旋转动画的设计与实现
将第i+1个组件放入第i个关节中,如图所示。

此时,改变inspector界面中的rotation就可以实现关节的旋转了,如果动画实现错误,将组件、关节拖动到一个层级上,检查组件的初始位置是否为(0,0,0),关节的初始位置是否在关节圆形切面的中心位置。

接下来,为每个关节实现旋转的代码。
public class Joint : MonoBehaviour
{
public TextMeshProUGUI text; //用于可视化界面显示角度的文本框
public Vector3 rotationAxis; //xyz哪个轴进行旋转才能实现动画效果
public Vector2 rotationLimit; //对关节的角度进行限制
float angle = 0f; //用于存储当前关节的角度
float rotationAnglePerSencond = 45f;//每秒旋转多少角度
int isRotation = 0; //按钮是否被按下,有-1,0,1三个值,分别表示逆向旋转,暂停,正向旋转
// 如果按钮被按下,则按照按钮对应的值进行旋转
void Update(){if (isRotation != 0) jointRotation(rotationAnglePerSencond * Time.deltaTime * isRotation);}
//获取当前关节的角度
public float getAngle(){return angle;}
//检查关节能否继续旋转△角度
public bool jointCheck(float deltaAngle)
{
if (angle + deltaAngle < rotationLimit.x)
return false;
if (angle + deltaAngle > rotationLimit.y)
return false;
return true;
}
//检查关节是否可以旋转,若可以更新角度和UI
public void jointRotation(float deltaAngle)
{
if (jointCheck(deltaAngle))
{
angle += deltaAngle;
transform.Rotate(deltaAngle * rotationAxis);
text.SetText(text.text.Substring(0, 12) + String.Format("{0:F2}", angle).PadLeft(7, ' '));
}
}
//绑定按钮+按下事件
public void rotationDirectionAdd(){isRotation = 1;}
//绑定按钮-按下事件
public void rotationDirectionSub(){isRotation = -1;}
//绑定按钮+-弹起事件
public void rotationDirectionStop(){isRotation = 0;}
}
将脚本拖动到每个关节中,设置脚本中的初始值,并将UI界面的按钮事件与脚本绑定,最终就可以实现如3.1 正移动学中的动画效果了。
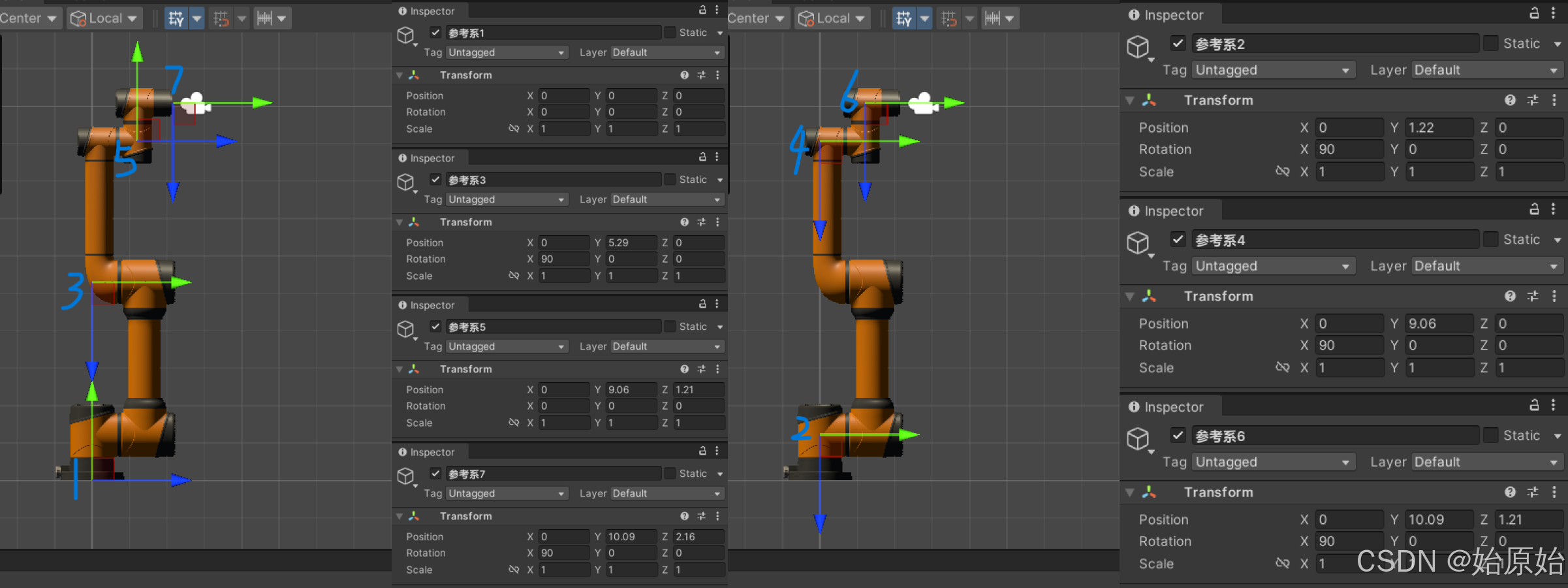
2.4 确定用于建模的变换坐标系
这一部分需要理解参考中的方法才能实现,如果机械臂的大致位置朝向和本文类似,可以试着跟着做。本文用的是SDH法,具体流程如下:
1、创建7个空物体分别命名为参考系1-7,所有空物体的初始位置要在(0,0,0)。
2、移动7个空物体到其相应的位置,精确位置的数值可以参考2.2旋转坐标系的位置。
具体操作:
①往上(绿色y轴正方向)移动得到②
②往上(绿色y轴正方向)移动得到③
③往上(绿色y轴正方向)移动得到④
④往右(蓝色z轴正方向)移动得到⑤
⑤往上(绿色y轴正方向)移动得到⑥
⑥往右(蓝色z轴正方向)移动得到⑦
3、旋转7个空物体到其相应的朝向,朝向的规则为:绿色y轴与其对应的关节圆形切面垂直;红色x轴与屏幕平面垂直。
具体操作:
②红色x轴正向旋转90度
③红色x轴正向旋转90度
④红色x轴正向旋转90度
⑥红色x轴正向旋转90度
⑦红色x轴正向旋转90度
4、确定SDH法中的参数,可以描述为:参考系i的红色x轴(xoz平面)绕其绿色y轴offset度得到参考系i+1的红色x轴(xoz平面)相同朝向;再将参考系i的原点沿绿色y轴平移d单位得到参考系i+1的原点相同高度;再将参考系i的绿色y轴(yoz平面)绕其红色x轴alpha度得到参考系i+1的绿色y轴(yoz平面)相同朝向;再将参考系i的原点沿蓝色z轴平移a单位得到参考系i+1的原点相同位置。
具体操作:
①依次通过rotation.y转动0度,position.y平移1.22单位,rotation.x转动90度,position.z平移0单位得到②
②依次通过rotation.y转动0度,position.y平移0单位,rotation.x转动0度,position.z平移-4.07单位得到③
③依次通过rotation.y转动0度,position.y平移0单位,rotation.x转动0度,position.z平移-3.77单位得到④
④依次通过rotation.y转动0度,position.y平移1.21单位,rotation.x转动-90度,position.z平移0单位得到⑤
⑤依次通过rotation.y转动0度,position.y平移1.03单位,rotation.x转动90度,position.z平移0单位得到⑥
⑥依次通过rotation.y转动0度,position.y平移0.95单位,rotation.x转动0度,position.z平移0单位得到⑦
参考:机器人工程师进阶之路(二)6轴机械臂D-H法建模。
2.5 正逆运动学的设计与实现
2.5.1 正运动学
正运动学的推导如4.2描述,因此正运动学的代码如下:
Matrix4x4 forward(double[] joint_theta)
{
Matrix4x4 T = Matrix4x4.identity;
// 公式T=T1T2T3T4T5T6
for (int i = 0; i < 6; i++) T *= SDH(new Vector3((float)alpha[i], (float)(joint_theta[i]+offset[i]), 0), new Vector3(0, (float)d[i], (float)a[i]));
return T;
}
其中SDH函数的代码如下:
Matrix4x4 SDH(Vector3 eulerAngles, Vector3 position = new Vector3())
{
double rx = eulerAngles.x / 180.0 * Math.PI;
double ry = eulerAngles.y / 180.0 * Math.PI;
double rz = eulerAngles.z / 180.0 * Math.PI;
double x = position.x;
double y = position.y;
double z = position.z;
Matrix4x4 Rx = new Matrix4x4(new Vector4(1f, 0f, 0f, 0f), new Vector4(0f, (float)Math.Cos(rx), (float)Math.Sin(rx), 0f), new Vector4(0f, -(float)Math.Sin(rx), (float)Math.Cos(rx), 0f), new Vector4(0f, 0f, 0f, 1f));
Matrix4x4 Ry = new Matrix4x4(new Vector4((float)Math.Cos(ry), 0f, -(float)Math.Sin(ry), 0f), new Vector4(0f, 1f, 0f, 0f), new Vector4((float)Math.Sin(ry), 0f, (float)Math.Cos(ry), 0f), new Vector4(0f, 0f, 0f, 1f));
Matrix4x4 Rz = new Matrix4x4(new Vector4((float)Math.Cos(rz), (float)Math.Sin(rz), 0f, 0f), new Vector4(-(float)Math.Sin(rz), (float)Math.Cos(rz), 0f, 0f), new Vector4(0f, 0f, 1f, 0f), new Vector4(0f, 0f, 0f, 1f));
Matrix4x4 Tx = new Matrix4x4(new Vector4(1f, 0f, 0f, 0f), new Vector4(0f, 1f, 0f, 0f), new Vector4(0f, 0f, 1f, 0f), new Vector4((float)x, 0f, 0f, 1f));
Matrix4x4 Ty = new Matrix4x4(new Vector4(1f, 0f, 0f, 0f), new Vector4(0f, 1f, 0f, 0f), new Vector4(0f, 0f, 1f, 0f), new Vector4(0f, (float)y, 0f, 1f));
Matrix4x4 Tz = new Matrix4x4(new Vector4(1f, 0f, 0f, 0f), new Vector4(0f, 1f, 0f, 0f), new Vector4(0f, 0f, 1f, 0f), new Vector4(0f, 0f, (float)z, 1f));
return Ry * Ty * Rx * Tx * Rz * Tz;
}
返回的T变换矩阵包含了旋转和位置的信息,可以通过1.3 变换矩阵转欧拉角来获取旋转信息,T.m03,T.m13,T.m23则是位置信息。
2.5.2 逆运动学
逆运动学的推导如4.3描述,因此逆运动学的代码如下:
List<np.array> inverseKinematics(Matrix4x4 T)
{
double d1 = d[0], a2 = a[1], a3 = a[2], d4 = d[3], d5 = d[4], d6 = d[5];
double nx = T.m00, ox = T.m01, ax = T.m02, px = T.m03;
double ny = T.m10, oy = T.m11, ay = T.m12, py = T.m13;
double nz = T.m20, oz = T.m21, az = T.m22, pz = T.m23;
var ans = new np.array[6];
for (int i = 0; i < ans.Length; i++) ans[i] = new np.array();
double m1 = pz - d6 * oz;
double n1 = d6 * ox - px;
ans[0][0, 4] = new np.array(np.arctan2(m1, n1) - np.arctan2(d4, np.pow(np.pow(m1, 2) + np.pow(n1, 2) - np.pow(d4, 2), 0.5)), 4);
ans[0][4, 8] = new np.array(np.arctan2(m1, n1) - np.arctan2(d4, -np.pow(np.pow(m1, 2) + np.pow(n1, 2) - np.pow(d4, 2), 0.5)), 4);
var s1 = np.sin(ans[0]);
var c1 = np.cos(ans[0]);
ans[4][0, 2] = np.arccos(s1[0, 2] * ox + oz * c1[0, 2]);
ans[4][2, 4] = -np.arccos(s1[2, 4] * ox + oz * c1[2, 4]);
ans[4][4, 6] = np.arccos(s1[4, 6] * ox + oz * c1[4, 6]);
ans[4][6, 8] = -np.arccos(s1[6, 8] * ox + oz * c1[6, 8]);
var s5 = np.sin(ans[4]);
var c5 = np.cos(ans[4]);
var m2 = s1 * ax + az * c1;
var n2 = s1 * nx + nz * c1;
ans[5] = np.arctan2(m2, n2) + np.arctan2(0, -s5);
var s6 = np.sin(ans[5]);
var c6 = np.cos(ans[5]);
var m3 = d5 * (-(c1 * nx - nz * s1) * s6 + c6 * (c1 * ax - az * s1)) - d6 * (c1 * ox - oz * s1) + (c1 * px - pz * s1);
var n3 = d5 * (ny * s6 - ay * c6) + oy * d6 - py + d1;
ans[2][0, 8, 2] = np.arccos(np.clip((np.pow(m3[0, 8, 2], 2) + np.pow(n3[0, 8, 2], 2) - np.pow(a2, 2) - np.pow(a3, 2)) / (2 * a2 * a3), -1, 1));
ans[2][1, 8, 2] = -np.arccos(np.clip((np.pow(m3[1, 8, 2], 2) + np.pow(n3[1, 8, 2], 2) - np.pow(a2, 2) - np.pow(a3, 2)) / (2 * a2 * a3), -1, 1));
var s3 = np.sin(ans[2]);
var c3 = np.cos(ans[2]);
var s2 = ((a3 * c3 + a2) * m3 - a3 * s3 * n3) / (np.pow(a2, 2) + np.pow(a3, 2) + 2 * a2 * a3 * c3);
var c2 = (n3 + a3 * s3 * s2) / (a3 * c3 + a2);
ans[1] = np.arctan2(s2, c2);
var m4 = (-ny * c6 - ay * s6) * (-c5) + s5 * oy;
var n4 = (ny * s6 - ay * c6);
ans[3] = np.arctan2(m4, n4) - ans[1] - ans[2];
return ans;
}
其中np类是对一些计算的封装,array类是对double[]的一个封装,方便用于计算,给出部分代码。
class np
{
public class array
{
public double[] data;
public int Length;
public array(double[] data){this.data = data;this.Length = data.Length;}
public static array operator +(array a, array b)
{
array ans = new array(new double[a.Length]);
for (int i = 0; i < a.Length; i++){ans[i] = a[i] + b[i];}
return ans;
}
public array this[int begin, int end, int sep]
{
get{array ans = new array(new double[(end - begin + 1) / sep]);for (int i = 0; i < ans.Length; i++){ans[i] = this[begin + i * sep];}return ans;}
set{for (int i = begin; i < end; i += sep){this[i] = value[(i - begin) / sep];}}
}
}
public static array arctan2(array a, array b)
{
array ans = new array(new double[a.Length]);
for (int i = 0; i < a.Length; i++){ans[i] = Math.Atan2(a[i], b[i]);}
return ans;
}
}
参考:UR机械臂正逆运动学求解。
2.6 机械臂示教器的设计与实现
2.6.1 回顾之前的工作
我们在第一章实现了旋转矩阵、欧拉角和四元数的互相转换。在2.5节实现了正逆移动学的代码,可以将(6个关节的角度)和(末端位置的旋转和平移)进行互相转换。在2.3节实现了单个关节的旋转动画。因此在这一节将实现机械臂示教器的模拟。
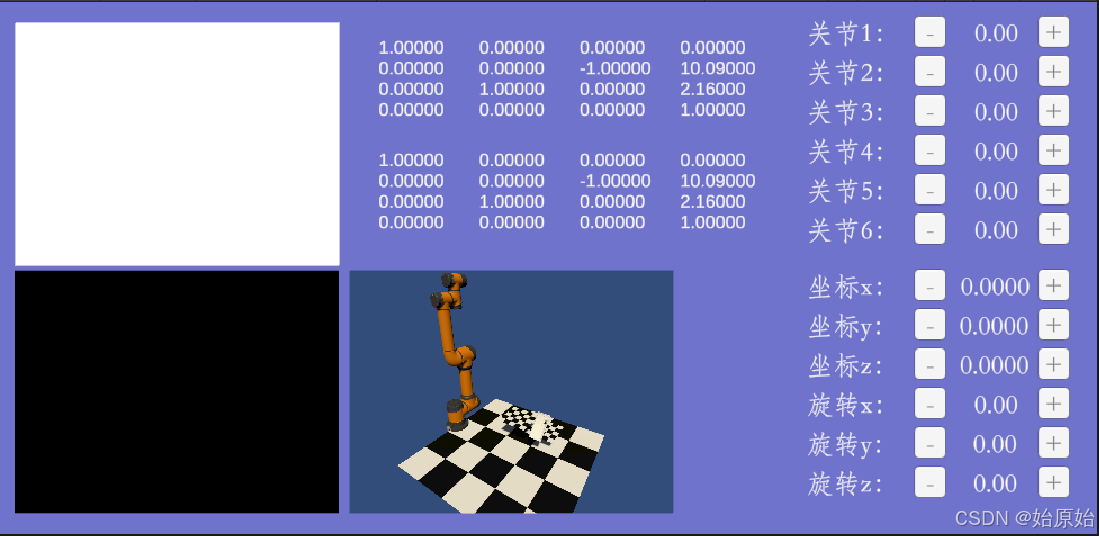
2.6.2 UI界面的制作
从下幅图片中可以看出,对机械臂的控制按钮有24个,分别是6个轴、3个姿态、3个位置的正向和反向变化。

创建一个UI相机;创建一个UI图层,包括显示机械臂所在环境的image,显示当前帧和下一帧的变化矩阵的text,6个轴、3个姿态、3个位置的正向和反向button及text。
2.6.3 机械臂脚本的制作
机械臂脚本的核心代码如下,在Start函数中限制帧率并初始化关节位置,在Update函数中的步骤如下:
1、获取每个关节的角度
2、正运动学求解获取x、y、z、rx、ry、rz
3、更新示教器UI
4、有无示教器操作,若无返回1
5、逆运动学求解获取j1、j2、j3、j4、j5、j6
6、选择最优解
7、移动每个关节到相应角度
8、更新示教器UI
void Start()
{
// 限制帧率,初始化关节位置
Application.targetFrameRate = 60;
joint1.GetComponent<Joint>().jointRotation(0f);
joint2.GetComponent<Joint>().jointRotation(-10f);
joint3.GetComponent<Joint>().jointRotation(-50f);
joint4.GetComponent<Joint>().jointRotation(-30f);
joint5.GetComponent<Joint>().jointRotation(90f);
joint6.GetComponent<Joint>().jointRotation(90f);
}
void Update()
{
theta = getTheta(); //获取每个关节的角度
T = forward(theta); //正运动学求解
updateUI(); //更新示教器UI
if (teachingPendant()) //有无示教器操作
{
var ans = inverseKinematics(nextT); //逆运动学求解
if (ans.Count > 0)
{
var cnt = chooseBest(ans); //选择最优解
moveJ(ans[cnt].data); //通过轴动实现运动
}
}
}
其中updateUI函数是读取变量并更新到UI界面上;teachingPendant函数是判断有无键鼠操作,有操作修改下一帧的T,无操作返回false;chooseBest函数是从8组解中选择与当前关节角度最接近的解。
参考:unity制作机械臂。
三、结果展示
3.1 正移动学

3.2 逆移动学
初版代码有bug,导致有时关节直接进行转跳,后来采用double的高精度浮点型数据类型进行计算可以避免bug。

四、原理解释
不同的坐标系和参数算出来的结果都不一样,下面的符号只适用于本文的情况进行推导,其中的区别是unity用的是左手坐标系y轴朝上,教程是右手坐标系z轴朝上。
参考:[机器人工程师进阶之路(二)6轴机械臂D-H法建模;UR机械臂正逆运动学求解]。
4.1 符号解释
- T i T_{i} Ti表示从第 i − 1 i-1 i−1个坐标系变换到第 i i i个坐标系的变换矩阵。
- 定义所有的y轴与关节活动处的圆形平面垂直。
- α i \alpha_{i} αi表示从第 i − 1 i-1 i−1个坐标系的y轴(yoz平面)绕其x轴旋转多少度能得到第 i i i个坐标系的y轴(yoz平面)。
- θ i \theta_{i} θi表示第 i i i个关节的转动角度。
- o f f s e t i offset_{i} offseti表示对第 i i i个关节的补偿角度。
- d i d_{i} di表示从第 i − 1 i-1 i−1个坐标系的原点沿其y轴平移多少距离能得到第 i i i个坐标系的原点。
- a i a_{i} ai表示从第 i − 1 i-1 i−1个坐标系的原点沿其z轴平移多少距离能得到第 i i i个坐标系的原点。
- Rx,Ry,Rz表示旋转矩阵,tx,ty,tz表示平移矩阵。
- 将 s i n ( θ 1 ) sin(\theta_{1}) sin(θ1)简化为s1,将 c o s ( θ 1 ) cos(\theta_{1}) cos(θ1)简化为c1,其他下标依次类推。
4.2 正运动学
重新推导变换矩阵为:
T
i
=
R
y
∗
t
y
∗
R
x
∗
t
z
=
[
c
o
s
(
θ
)
s
i
n
(
θ
)
s
i
n
(
α
)
s
i
n
(
θ
)
c
o
s
(
α
)
z
∗
s
i
n
(
θ
)
c
o
s
(
α
)
0
c
o
s
(
α
)
−
s
i
n
(
α
)
−
z
∗
s
i
n
(
α
)
+
y
−
s
i
n
(
θ
)
c
o
s
(
θ
)
s
i
n
(
α
)
c
o
s
(
θ
)
c
o
s
(
α
)
z
∗
c
o
s
(
θ
)
c
o
s
(
α
)
0
0
0
1
]
T_{i}=Ry*ty*Rx*tz= \begin{bmatrix} cos(\theta) & sin(\theta)sin(\alpha) & sin(\theta)cos(\alpha) & z*sin(\theta)cos(\alpha)\\ 0 & cos(\alpha) & -sin(\alpha) & -z*sin(\alpha)+y\\ -sin(\theta) & cos(\theta)sin(\alpha) & cos(\theta)cos(\alpha) & z*cos(\theta)cos(\alpha)\\ 0 & 0 & 0 & 1 \end{bmatrix}
Ti=Ry∗ty∗Rx∗tz=
cos(θ)0−sin(θ)0sin(θ)sin(α)cos(α)cos(θ)sin(α)0sin(θ)cos(α)−sin(α)cos(θ)cos(α)0z∗sin(θ)cos(α)−z∗sin(α)+yz∗cos(θ)cos(α)1
绘制参数表格:
| i | α \alpha α(x轴) | θ \theta θ(y轴) | d(y轴) | a(z轴) | offset(y轴) |
|---|---|---|---|---|---|
| 1 | 90 | j1 | 1.22 | 0 | 0 |
| 2 | 0 | j2 | 0 | -4.07 | 0 |
| 3 | 0 | j3 | 0 | -3.77 | 0 |
| 4 | -90 | j4 | 1.21 | 0 | 0 |
| 5 | 90 | j5 | 1.03 | 0 | 0 |
| 6 | 0 | j6 | 0.95 | 0 | 0 |
将每个变量代入得:
T
1
=
[
c
1
s
1
0
0
0
0
−
1
d
1
−
s
1
c
1
0
0
0
0
0
1
]
,
T
2
=
[
c
2
0
s
2
a
2
∗
s
2
0
1
0
0
−
s
2
0
c
2
a
2
∗
c
2
0
0
0
1
]
,
T
3
=
[
c
3
0
s
3
a
3
∗
s
3
0
1
0
0
−
s
3
0
c
3
a
3
∗
c
3
0
0
0
1
]
,
T
4
=
[
c
4
−
s
4
0
0
0
0
1
d
4
−
s
4
−
c
4
0
0
0
0
0
1
]
,
T
5
=
[
c
5
s
5
0
0
0
0
−
1
d
5
−
s
5
c
5
0
0
0
0
0
1
]
,
T
6
=
[
c
6
0
s
6
0
0
1
0
d
6
−
s
6
0
c
6
0
0
0
0
1
]
T_{1}= \begin{bmatrix} c1 & s1& 0 & 0\\ 0 & 0 & -1 & d1\\ -s1 & c1& 0 & 0\\ 0 & 0 & 0 & 1 \end{bmatrix}, T_{2}= \begin{bmatrix} c2& 0 & s2 & a2*s2\\ 0 & 1 & 0 & 0\\ -s2 & 0 & c2 & a2*c2\\ 0 & 0 & 0 & 1 \end{bmatrix}, T_{3}= \begin{bmatrix} c3& 0 & s3 & a3*s3\\ 0 & 1 & 0 & 0\\ -s3 & 0 & c3 & a3*c3\\ 0 & 0 & 0 & 1 \end{bmatrix}, T_{4}= \begin{bmatrix} c4& -s4& 0 & 0\\ 0 & 0 & 1 & d4\\ -s4 & -c4& 0 & 0\\ 0 & 0 & 0 & 1 \end{bmatrix}, T_{5}= \begin{bmatrix} c5 & s5 & 0 & 0\\ 0 & 0 & -1 & d5\\ -s5 & c5 & 0 & 0\\ 0 & 0 & 0 & 1 \end{bmatrix}, T_{6}= \begin{bmatrix} c6 & 0 & s6 & 0\\ 0 & 1 & 0 & d6\\ -s6 & 0 & c6 & 0\\ 0 & 0 & 0 & 1 \end{bmatrix}
T1=
c10−s10s10c100−1000d101
,T2=
c20−s200100s20c20a2∗s20a2∗c21
,T3=
c30−s300100s30c30a3∗s30a3∗c31
,T4=
c40−s40−s40−c4001000d401
,T5=
c50−s50s50c500−1000d501
,T6=
c60−s600100s60c600d601
设T为:
T
=
[
n
x
o
x
a
x
p
x
n
y
o
y
a
y
p
y
n
z
o
z
a
z
p
z
0
0
0
1
]
T= \begin{bmatrix} nx & ox & ax & px \\ ny & oy & ay & py \\ nz & oz & az & pz \\ 0 & 0 & 0 & 1 \end{bmatrix}
T=
nxnynz0oxoyoz0axayaz0pxpypz1
正运动学公式为
T
=
T
1
T
2
T
3
T
4
T
5
T
6
T=T_{1}T_{2}T_{3}T_{4}T_{5}T_{6}
T=T1T2T3T4T5T6
4.3 逆运动学
4.3.1 求解156轴
这个公式成立:
T
1
−
1
T
T
6
−
1
=
T
2
T
3
T
4
T
5
T_{1}^{-1}TT_{6}^{-1}=T_{2}T_{3}T_{4}T_{5}
T1−1TT6−1=T2T3T4T5
其中1和6的逆为:
T
1
−
1
=
[
c
1
0
−
s
1
0
s
1
0
c
1
0
0
−
1
0
d
1
0
0
0
1
]
,
T
6
−
1
=
[
c
6
0
−
s
6
0
0
1
0
−
d
6
s
6
0
c
6
0
0
0
0
1
]
T_{1}^{-1}= \begin{bmatrix} c1&0&-s1&0\\ s1&0&c1&0\\ 0&-1&0&d1\\ 0&0&0&1 \end{bmatrix}, T_{6}^{-1}= \begin{bmatrix} c6&0&-s6&0\\ 0&1&0&-d6\\ s6&0&c6&0\\ 0&0&0&1 \end{bmatrix}
T1−1=
c1s10000−10−s1c10000d11
,T6−1=
c60s600100−s60c600−d601
左边等于:
T
1
−
1
T
T
6
−
1
=
[
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
c
6
+
s
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
(
c
1
∗
o
x
−
o
z
∗
s
1
)
−
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
s
6
+
c
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
−
d
6
∗
(
c
1
∗
o
x
−
o
z
∗
s
1
)
+
(
c
1
∗
p
x
−
p
z
∗
s
1
)
(
s
1
∗
n
x
+
n
z
∗
c
1
)
∗
c
6
+
s
6
∗
(
s
1
∗
a
x
+
a
z
∗
c
1
)
(
s
1
∗
o
x
+
o
z
∗
c
1
)
−
(
s
1
∗
n
x
+
n
z
∗
c
1
)
∗
s
6
+
c
6
∗
(
s
1
∗
a
x
+
a
z
∗
c
1
)
−
d
6
∗
(
s
1
∗
o
x
+
o
z
∗
c
1
)
+
(
s
1
∗
p
x
+
p
z
∗
c
1
)
−
n
y
∗
c
6
−
a
y
∗
s
6
−
o
y
n
y
∗
s
6
−
a
y
∗
c
6
o
y
∗
d
6
−
p
y
+
d
1
0
0
0
1
]
T_{1}^{-1}TT_{6}^{-1}= \begin{bmatrix} (c1*nx-nz*s1)*c6+s6*(c1*ax-az*s1)&(c1*ox-oz*s1)&-(c1*nx-nz*s1)*s6+c6*(c1*ax-az*s1)&-d6*(c1*ox-oz*s1)+(c1*px-pz*s1)\\ (s1*nx+nz*c1)*c6+s6*(s1*ax+az*c1)&(s1*ox+oz*c1)&-(s1*nx+nz*c1)*s6+c6*(s1*ax+az*c1)&-d6*(s1*ox+oz*c1)+(s1*px+pz*c1)\\ -ny*c6-ay*s6&-oy&ny*s6-ay*c6&oy*d6-py+d1\\ 0&0&0&1 \end{bmatrix}
T1−1TT6−1=
(c1∗nx−nz∗s1)∗c6+s6∗(c1∗ax−az∗s1)(s1∗nx+nz∗c1)∗c6+s6∗(s1∗ax+az∗c1)−ny∗c6−ay∗s60(c1∗ox−oz∗s1)(s1∗ox+oz∗c1)−oy0−(c1∗nx−nz∗s1)∗s6+c6∗(c1∗ax−az∗s1)−(s1∗nx+nz∗c1)∗s6+c6∗(s1∗ax+az∗c1)ny∗s6−ay∗c60−d6∗(c1∗ox−oz∗s1)+(c1∗px−pz∗s1)−d6∗(s1∗ox+oz∗c1)+(s1∗px+pz∗c1)oy∗d6−py+d11
右边等于:
T
2
T
3
T
4
T
5
=
[
c
234
∗
c
5
c
234
∗
s
5
s
234
−
s
234
∗
d
5
+
a
3
∗
s
23
+
a
2
∗
s
2
−
s
5
c
5
0
d
4
−
s
234
∗
c
5
−
s
234
∗
s
5
c
234
−
c
234
∗
d
5
+
a
3
∗
c
23
+
a
2
∗
c
2
0
0
0
1
]
T_{2}T_{3}T_{4}T_{5}= \begin{bmatrix} c234*c5& c234*s5 & s234 & -s234*d5+a3*s23+a2*s2\\ -s5 & c5 & 0 & d4\\ -s234*c5 & -s234*s5 & c234 & -c234*d5+a3*c23+a2*c2\\ 0 & 0 & 0 & 1 \end{bmatrix}
T2T3T4T5=
c234∗c5−s5−s234∗c50c234∗s5c5−s234∗s50s2340c2340−s234∗d5+a3∗s23+a2∗s2d4−c234∗d5+a3∗c23+a2∗c21
其中有3条方程为:
{
−
d
6
∗
(
s
1
∗
o
x
+
o
z
∗
c
1
)
+
(
s
1
∗
p
x
+
p
z
∗
c
1
)
=
d
4
①
(
s
1
∗
o
x
+
o
z
∗
c
1
)
=
c
5
②
(
s
1
∗
n
x
+
n
z
∗
c
1
)
∗
c
6
+
s
6
∗
(
s
1
∗
a
x
+
a
z
∗
c
1
)
=
−
s
5
③
\left\{\begin{matrix} -d6*(s1*ox+oz*c1)+(s1*px+pz*c1)=d4 \text{ } \text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }①\\ (s1*ox+oz*c1)=c5 \text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }②\\ (s1*nx+nz*c1)*c6+s6*(s1*ax+az*c1)=-s5\text{ }③\\ \end{matrix}\right.
⎩
⎨
⎧−d6∗(s1∗ox+oz∗c1)+(s1∗px+pz∗c1)=d4 ①(s1∗ox+oz∗c1)=c5 ②(s1∗nx+nz∗c1)∗c6+s6∗(s1∗ax+az∗c1)=−s5 ③
根据①式解得:
θ
1
=
a
r
c
t
a
n
2
(
m
1
,
n
1
)
−
a
r
c
t
a
n
2
(
d
4
,
±
m
1
2
+
n
1
2
−
d
4
2
)
\theta_{1}=arctan2(m_{1},n_{1})-arctan2(d4,\pm \sqrt{m_{1}^{2}+n_{1}^{2}-d_{4}^{2}} )
θ1=arctan2(m1,n1)−arctan2(d4,±m12+n12−d42)
其中
m
1
=
p
z
−
d
6
∗
o
z
,
n
1
=
d
6
∗
o
x
−
p
x
m_{1}=pz-d6*oz,n_{1}=d6*ox-px
m1=pz−d6∗oz,n1=d6∗ox−px。
*
θ
1
\theta_{1}
θ1有两个解,得到两组解。
根据②式解得:
θ
5
=
±
a
r
c
c
o
s
(
s
1
∗
o
x
+
o
z
∗
c
1
)
\theta_{5}=\pm arccos(s1*ox+oz*c1)
θ5=±arccos(s1∗ox+oz∗c1)
*
θ
5
\theta_{5}
θ5有两个解,得到四组解。
根据③式解得:
θ
6
=
a
r
c
t
a
n
2
(
m
2
,
n
2
)
+
a
r
c
t
a
n
2
(
0
,
−
s
5
)
\theta_{6}=arctan2(m_{2},n_{2})+arctan2(0,-s5)
θ6=arctan2(m2,n2)+arctan2(0,−s5)
其中
m
2
=
s
1
∗
a
x
+
a
z
∗
c
1
,
n
2
=
s
1
∗
n
x
+
n
z
∗
c
1
m_{2}=s1*ax+az*c1,n_{2}=s1*nx+nz*c1
m2=s1∗ax+az∗c1,n2=s1∗nx+nz∗c1。
*arctan2(0,-s5)根据第5个轴的正负使其相差180°。
4.3.2 求解234轴
这个公式成立:
T
1
−
1
T
T
6
−
1
T
5
−
1
=
T
2
T
3
T
4
T_{1}^{-1}TT_{6}^{-1}T_{5}^{-1}=T_{2}T_{3}T_{4}
T1−1TT6−1T5−1=T2T3T4
其中5的逆为:
T
5
−
1
=
[
c
5
0
−
s
5
0
s
5
0
c
5
0
0
−
1
0
d
5
0
0
0
1
]
T_{5}^{-1}= \begin{bmatrix} c5&0&-s5&0\\ s5&0&c5&0\\ 0&-1&0&d5\\ 0&0&0&1 \end{bmatrix}
T5−1=
c5s50000−10−s5c50000d51
左边等于:
T
1
−
1
T
T
6
−
1
T
5
−
1
=
[
(
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
c
6
+
s
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
)
∗
c
5
+
s
5
∗
(
c
1
∗
o
x
−
o
z
∗
s
1
)
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
s
6
−
c
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
(
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
c
6
+
s
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
)
∗
(
−
s
5
)
+
c
5
∗
(
c
1
∗
o
x
−
o
z
∗
s
1
)
d
5
∗
(
−
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
s
6
+
c
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
)
−
d
6
∗
(
c
1
∗
o
x
−
o
z
∗
s
1
)
+
(
c
1
∗
p
x
−
p
z
∗
s
1
)
(
(
s
1
∗
n
x
+
n
z
∗
c
1
)
∗
c
6
+
s
6
∗
(
s
1
∗
a
x
+
a
z
∗
c
1
)
)
∗
c
5
+
s
5
∗
(
s
1
∗
o
x
+
o
z
∗
c
1
)
(
s
1
∗
n
x
+
n
z
∗
c
1
)
∗
s
6
−
c
6
∗
(
s
1
∗
a
x
+
a
z
∗
c
1
)
(
(
s
1
∗
n
x
+
n
z
∗
c
1
)
∗
c
6
+
s
6
∗
(
s
1
∗
a
x
+
a
z
∗
c
1
)
)
∗
(
−
s
5
)
+
c
5
∗
(
s
1
∗
o
x
+
o
z
∗
c
1
)
d
5
∗
(
−
(
s
1
∗
n
x
+
n
z
∗
c
1
)
∗
s
6
+
c
6
∗
(
s
1
∗
a
x
+
a
z
∗
c
1
)
)
−
d
6
∗
(
s
1
∗
o
x
+
o
z
∗
c
1
)
+
(
s
1
∗
p
x
+
p
z
∗
c
1
)
(
−
n
y
∗
c
6
−
a
y
∗
s
6
)
∗
c
5
+
s
5
∗
(
−
o
y
)
−
(
n
y
∗
s
6
−
a
y
∗
c
6
)
(
−
n
y
∗
c
6
−
a
y
∗
s
6
)
∗
(
−
s
5
)
+
c
5
∗
(
−
o
y
)
d
5
∗
(
n
y
∗
s
6
−
a
y
∗
c
6
)
+
o
y
∗
d
6
−
p
y
+
d
1
0
0
0
1
]
T_{1}^{-1}TT_{6}^{-1}T_{5}^{-1}= \begin{bmatrix} ((c1*nx-nz*s1)*c6+s6*(c1*ax-az*s1))*c5+s5*(c1*ox-oz*s1)&(c1*nx-nz*s1)*s6-c6*(c1*ax-az*s1)&((c1*nx-nz*s1)*c6+s6*(c1*ax-az*s1))*(-s5)+c5*(c1*ox-oz*s1)&d5*(-(c1*nx-nz*s1)*s6+c6*(c1*ax-az*s1))-d6*(c1*ox-oz*s1)+(c1*px-pz*s1)\\ ((s1*nx+nz*c1)*c6+s6*(s1*ax+az*c1))*c5+s5*(s1*ox+oz*c1)&(s1*nx+nz*c1)*s6-c6*(s1*ax+az*c1)&((s1*nx+nz*c1)*c6+s6*(s1*ax+az*c1))*(-s5)+c5*(s1*ox+oz*c1)&d5*(-(s1*nx+nz*c1)*s6+c6*(s1*ax+az*c1))-d6*(s1*ox+oz*c1)+(s1*px+pz*c1)\\ (-ny*c6-ay*s6)*c5+s5*(-oy)&-(ny*s6-ay*c6)&(-ny*c6-ay*s6)*(-s5)+c5*(-oy)&d5*(ny*s6-ay*c6)+oy*d6-py+d1\\ 0&0&0&1 \end{bmatrix}
T1−1TT6−1T5−1=
((c1∗nx−nz∗s1)∗c6+s6∗(c1∗ax−az∗s1))∗c5+s5∗(c1∗ox−oz∗s1)((s1∗nx+nz∗c1)∗c6+s6∗(s1∗ax+az∗c1))∗c5+s5∗(s1∗ox+oz∗c1)(−ny∗c6−ay∗s6)∗c5+s5∗(−oy)0(c1∗nx−nz∗s1)∗s6−c6∗(c1∗ax−az∗s1)(s1∗nx+nz∗c1)∗s6−c6∗(s1∗ax+az∗c1)−(ny∗s6−ay∗c6)0((c1∗nx−nz∗s1)∗c6+s6∗(c1∗ax−az∗s1))∗(−s5)+c5∗(c1∗ox−oz∗s1)((s1∗nx+nz∗c1)∗c6+s6∗(s1∗ax+az∗c1))∗(−s5)+c5∗(s1∗ox+oz∗c1)(−ny∗c6−ay∗s6)∗(−s5)+c5∗(−oy)0d5∗(−(c1∗nx−nz∗s1)∗s6+c6∗(c1∗ax−az∗s1))−d6∗(c1∗ox−oz∗s1)+(c1∗px−pz∗s1)d5∗(−(s1∗nx+nz∗c1)∗s6+c6∗(s1∗ax+az∗c1))−d6∗(s1∗ox+oz∗c1)+(s1∗px+pz∗c1)d5∗(ny∗s6−ay∗c6)+oy∗d6−py+d11
右边等于:
T
2
T
3
T
4
=
[
c
234
−
s
234
0
a
3
∗
s
23
+
a
2
∗
s
2
0
0
1
d
4
−
s
234
−
c
234
0
a
3
∗
c
23
+
a
2
∗
c
2
0
0
0
1
]
T_{2}T_{3}T_{4}= \begin{bmatrix} c234& -s234 & 0 & a3*s23+a2*s2\\ 0 & 0 & 1 & d4\\ -s234 & -c234 & 0 & a3*c23+a2*c2\\ 0 & 0 & 0 & 1 \end{bmatrix}
T2T3T4=
c2340−s2340−s2340−c23400100a3∗s23+a2∗s2d4a3∗c23+a2∗c21
其中有4条方程为:
{
d
5
∗
(
−
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
s
6
+
c
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
)
−
d
6
∗
(
c
1
∗
o
x
−
o
z
∗
s
1
)
+
(
c
1
∗
p
x
−
p
z
∗
s
1
)
=
a
3
∗
s
23
+
a
2
∗
s
2
④
d
5
∗
(
n
y
∗
s
6
−
a
y
∗
c
6
)
+
o
y
∗
d
6
−
p
y
+
d
1
=
a
3
∗
c
23
+
a
2
∗
c
2
⑤
−
s
234
=
(
−
n
y
∗
c
6
−
a
y
∗
s
6
)
∗
c
5
+
s
5
∗
(
−
o
y
)
⑥
−
c
234
=
−
(
n
y
∗
s
6
−
a
y
∗
c
6
)
⑦
\left\{\begin{matrix} d5*(-(c1*nx-nz*s1)*s6+c6*(c1*ax-az*s1))-d6*(c1*ox-oz*s1)+(c1*px-pz*s1)=a3*s23+a2*s2④\\ d5*(ny*s6-ay*c6)+oy*d6-py+d1=a3*c23+a2*c2\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }⑤\\ -s234=(-ny*c6-ay*s6)*c5+s5*(-oy)\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }⑥\\ -c234=-(ny*s6-ay*c6)\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }⑦\\ \end{matrix}\right.
⎩
⎨
⎧d5∗(−(c1∗nx−nz∗s1)∗s6+c6∗(c1∗ax−az∗s1))−d6∗(c1∗ox−oz∗s1)+(c1∗px−pz∗s1)=a3∗s23+a2∗s2④d5∗(ny∗s6−ay∗c6)+oy∗d6−py+d1=a3∗c23+a2∗c2 ⑤−s234=(−ny∗c6−ay∗s6)∗c5+s5∗(−oy) ⑥−c234=−(ny∗s6−ay∗c6) ⑦
根据④⑤式解得:
θ
3
=
±
a
r
c
c
o
s
(
m
3
2
+
n
3
2
−
a
2
2
−
a
3
2
2
∗
a
2
∗
a
3
)
\theta_{3}=\pm arccos(\frac{m_{3}^{2}+n_{3}^{2}-a2^{2}-a3^{2}}{2*a2*a3})
θ3=±arccos(2∗a2∗a3m32+n32−a22−a32)
其中
m
3
=
d
5
∗
(
−
(
c
1
∗
n
x
−
n
z
∗
s
1
)
∗
s
6
+
c
6
∗
(
c
1
∗
a
x
−
a
z
∗
s
1
)
)
−
d
6
∗
(
c
1
∗
o
x
−
o
z
∗
s
1
)
+
(
c
1
∗
p
x
−
p
z
∗
s
1
)
,
n
3
=
d
5
∗
(
n
y
∗
s
6
−
a
y
∗
c
6
)
+
o
y
∗
d
6
−
p
y
+
d
1
m_{3}=d5*(-(c1*nx-nz*s1)*s6+c6*(c1*ax-az*s1))-d6*(c1*ox-oz*s1)+(c1*px-pz*s1),n_{3}=d5*(ny*s6-ay*c6)+oy*d6-py+d1
m3=d5∗(−(c1∗nx−nz∗s1)∗s6+c6∗(c1∗ax−az∗s1))−d6∗(c1∗ox−oz∗s1)+(c1∗px−pz∗s1),n3=d5∗(ny∗s6−ay∗c6)+oy∗d6−py+d1。
*
θ
3
\theta_{3}
θ3有两个解,得到八组解。但
m
3
2
+
n
3
2
−
a
2
2
−
a
3
2
2
∗
a
2
∗
a
3
>
1
\frac{m_{3}^{2}+n_{3}^{2}-a2^{2}-a3^{2}}{2*a2*a3}>1
2∗a2∗a3m32+n32−a22−a32>1,使某几组解解不出???最终解为2组的概率为24.5%,为4组的概率为73.2%,为6组的概率为1.7%,为8组的概率为0.6%。
根据④⑤式解得:
θ
2
=
a
r
c
t
a
n
2
(
s
2
,
c
2
)
\theta_{2}=arctan2(s2,c2)
θ2=arctan2(s2,c2)
其中
s
2
=
(
a
3
∗
c
3
+
a
2
)
∗
m
3
−
a
3
∗
s
3
∗
n
3
a
2
2
+
a
3
2
+
2
∗
a
2
∗
a
3
∗
c
3
,
c
2
=
n
3
+
a
3
∗
s
3
∗
s
2
a
3
∗
c
3
+
a
2
s2=\frac{(a3*c3+a2)*m_{3}-a3*s3*n_{3}}{a2^{2}+a3^{2}+2*a2*a3*c3} ,c2=\frac{n_{3}+a3*s3*s2}{a3*c3+a2}
s2=a22+a32+2∗a2∗a3∗c3(a3∗c3+a2)∗m3−a3∗s3∗n3,c2=a3∗c3+a2n3+a3∗s3∗s2。
根据⑥⑦式解得:
θ
4
=
a
r
c
t
a
n
2
(
m
4
,
n
4
)
−
θ
2
−
θ
3
\theta_{4}=arctan2(m_{4},n_{4})-\theta_{2}-\theta_{3}
θ4=arctan2(m4,n4)−θ2−θ3
其中
m
4
=
(
−
n
y
∗
c
6
−
a
y
∗
s
6
)
∗
(
−
c
5
)
+
s
5
∗
o
y
,
n
4
=
(
n
y
∗
s
6
−
a
y
∗
c
6
)
m_{4}=(-ny*c6-ay*s6)*(-c5)+s5*oy,n_{4}=(ny*s6-ay*c6)
m4=(−ny∗c6−ay∗s6)∗(−c5)+s5∗oy,n4=(ny∗s6−ay∗c6)。
4.4 用python进行验证
import numpy as np
def eulerAnglesToRotationMatrix(alpha,theta,beta,x,y,z):
alpha = alpha/180.0*np.pi
theta = theta/180.0*np.pi
beta = beta/180.0*np.pi
Rx=np.array([
[1, 0, 0, 0],
[0, np.cos(alpha), -np.sin(alpha), 0],
[0, np.sin(alpha), np.cos(alpha), 0],
[0, 0, 0, 1]
])
Ry=np.array([
[np.cos(theta), 0, np.sin(theta), 0],
[0, 1, 0, 0],
[-np.sin(theta), 0, np.cos(theta), 0],
[0, 0, 0, 1]
])
Rz=np.array([
[np.cos(beta), -np.sin(beta), 0, 0],
[np.sin(beta), np.cos(beta), 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]
])
Tx=np.array([
[1, 0, 0, x],
[0, 1, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]
])
Ty=np.array([
[1, 0, 0, 0],
[0, 1, 0, y],
[0, 0, 1, 0],
[0, 0, 0, 1]
])
Tz=np.array([
[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, z],
[0, 0, 0, 1]
])
return Ry@Ty@Rx@Tx@Rz@Tz
pq = lambda x: 180 - (180 - x) % 360
pr = lambda x: print(np.round(x,4))
num_ans = []
for epoch in range(10):
#======================init=======================
a = [0,-4.07,-3.77,0,0,0]
d = [1.22,0,0,1.21,1.03,0.95]
d1,a2,a3,d4,d5,d6 = d[0],a[1],a[2],d[3],d[4],d[5]
theta = (np.random.rand(6)*2-1)*180/np.pi
#====================forward======================
T = np.eye(4)
T = T@eulerAnglesToRotationMatrix(90,theta[0],0,0,d[0],a[0])
T = T@eulerAnglesToRotationMatrix(0,theta[1],0,0,d[1],a[1])
T = T@eulerAnglesToRotationMatrix(0,theta[2],0,0,d[2],a[2])
T = T@eulerAnglesToRotationMatrix(-90,theta[3],0,0,d[3],a[3])
T = T@eulerAnglesToRotationMatrix(90,theta[4],0,0,d[4],a[4])
T = T@eulerAnglesToRotationMatrix(0,theta[5],0,0,d[5],a[5])
(nx,ox,ax,px),(ny,oy,ay,py),(nz,oz,az,pz),_= T
print("6个关节旋转的角度:",np.round(theta,4))
print("===>正运动学解:\n",np.round(T,4))
#======================156轴=======================
ans = np.zeros((8,6))
m1 = pz-d6*oz
n1 = d6*ox-px
ans[0:4,0]=np.arctan2(m1,n1)-np.arctan2(d4,(m1**2+n1**2-d4**2)**0.5)
ans[4:8,0]=np.arctan2(m1,n1)-np.arctan2(d4,-(m1**2+n1**2-d4**2)**0.5)
s1 = np.sin(ans[:,0])
c1 = np.cos(ans[:,0])
# pr(-d6*(s1*ox+oz*c1)+(s1*px+pz*c1)-d4)
ans[0:2,4]=np.arccos(s1[0:2]*ox+oz*c1[0:2])
ans[2:4,4]=-np.arccos(s1[2:4]*ox+oz*c1[2:4])
ans[4:6,4]=np.arccos(s1[4:6]*ox+oz*c1[4:6])
ans[6:8,4]=-np.arccos(s1[6:8]*ox+oz*c1[6:8])
s5 = np.sin(ans[:,4])
c5 = np.cos(ans[:,4])
# pr(s1*ox+oz*c1-c5)
m2 = s1*ax+az*c1
n2 = s1*nx+nz*c1
ans[:,5]=np.arctan2(m2,n2)+np.arctan2(0,-s5)
s6 = np.sin(ans[:,5])
c6 = np.cos(ans[:,5])
# pr(n*c6+s6*m+s5)
#======================234轴=======================
m3 = d5*(-(c1*nx-nz*s1)*s6+c6*(c1*ax-az*s1))-d6*(c1*ox-oz*s1)+(c1*px-pz*s1)
n3 = d5*(ny*s6-ay*c6)+oy*d6-py+d1
ans[0::2,2] = np.arccos(np.clip((m3[0::2]**2+n3[0::2]**2-a2**2-a3**2)/(2*a2*a3), -1, 1))
ans[1::2,2] = -np.arccos(np.clip((m3[1::2]**2+n3[1::2]**2-a2**2-a3**2)/(2*a2*a3), -1, 1))
s3 = np.sin(ans[:,2])
c3 = np.cos(ans[:,2])
s2 = ((a3*c3+a2)*m3-a3*s3*n3)/(a2**2+a3**2+2*a2*a3*c3)
c2 = (n3+a3*s3*s2)/(a3*c3+a2)
ans[:,1]=np.arctan2(s2,c2)
m4=(-ny*c6-ay*s6)*(-c5)+s5*oy
n4=(ny*s6-ay*c6)
ans[:,3]=np.arctan2(m4,n4)-ans[:,1]-ans[:,2]
#======================验证========================
print("===>逆运动学解: ")
cnt=0
for theta_ans in ans:
theta_ans = theta_ans*180.0/np.pi
t1 = eulerAnglesToRotationMatrix(90,theta_ans[0],0,0,d[0],a[0])
t2 = eulerAnglesToRotationMatrix(0,theta_ans[1],0,0,d[1],a[1])
t3 = eulerAnglesToRotationMatrix(0,theta_ans[2],0,0,d[2],a[2])
t4 = eulerAnglesToRotationMatrix(-90,theta_ans[3],0,0,d[3],a[3])
t5 = eulerAnglesToRotationMatrix(90,theta_ans[4],0,0,d[4],a[4])
t6 = eulerAnglesToRotationMatrix(0,theta_ans[5],0,0,d[5],a[5])
if np.all(np.isclose(t1@t2@t3@t4@t5@t6,T)):
pr(pq(theta_ans))
cnt+=1
print("="*64)
num_ans.append(cnt)
print(np.unique(num_ans,return_counts=True))
代码实现了:随机给定一组6轴关节旋转角度,根据正运动学解得末端位置坐标系相对于参考坐标系的变换矩阵;给定变换矩阵,根据逆运动学解得6轴关节旋转角度。具体结果如下图所示:
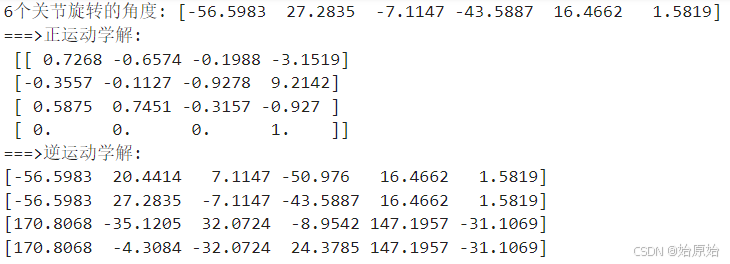
*注意区分角度和弧度,以上结果均为角度。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









