






一、找到一个裸机工程模板,基于模板移植FreeRTOS系统
以STM32F103单片机为例:
二、下载FreeRTOS源码包
在移植之前,我们首先要获取到 FreeRTOS 的官方的源码包。这里我们提供两个下载 链 接 , 一 个 是 官 网 : FreeRTOS - Market leading RTOS (Real Time Operating System) for embedded systems with Internet of Things extensions, 另 外 一 个 是 代 码 托 管 网 站 : FreeRTOS Real Time Kernel (RTOS) - Browse /FreeRTOS at SourceForge.net。虽然不是最新版本的源码包但是因为内核很稳定, 并且网上资料很多所以我们选用V9.0.0 版本,打开 FreeRTOS 的代码托管网站,就可以看到 FreeRTOS 的源码及其版本信息了, 具体见图


解压并解压后源码如图所示:
文件夹介绍:

核心源码内容在FreeRTOS文件夹:
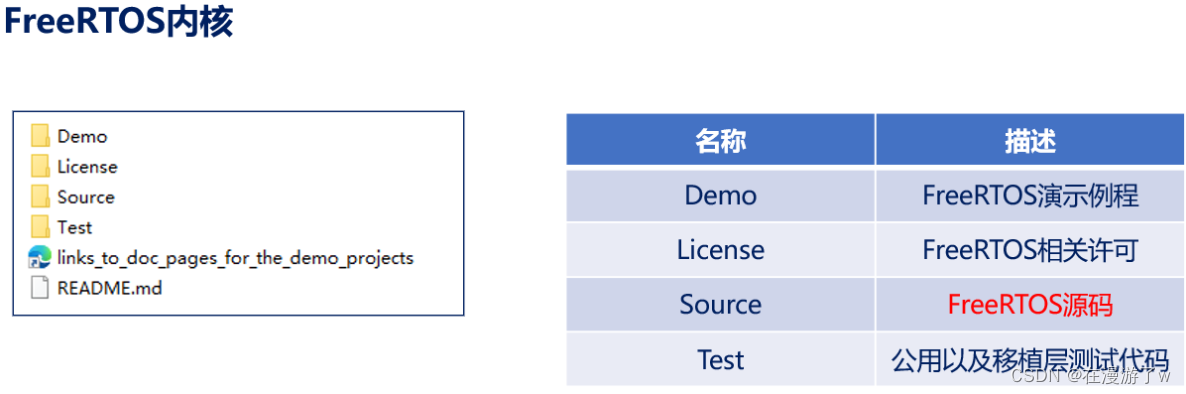
其中Demo 文件夹里面是 FreeRTOS 的演示例程,如图所示:

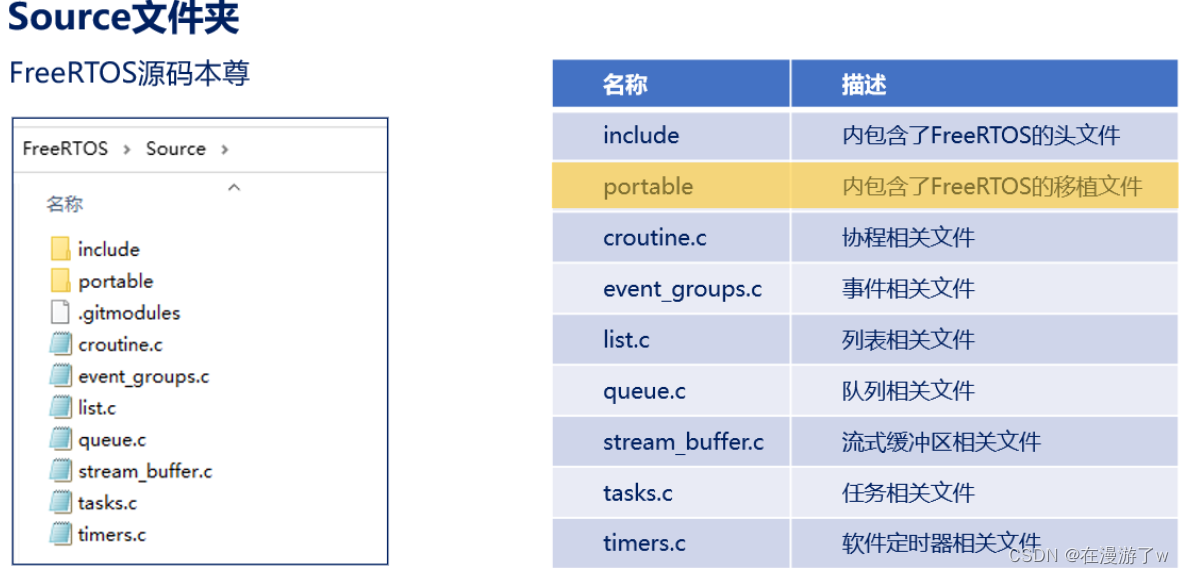
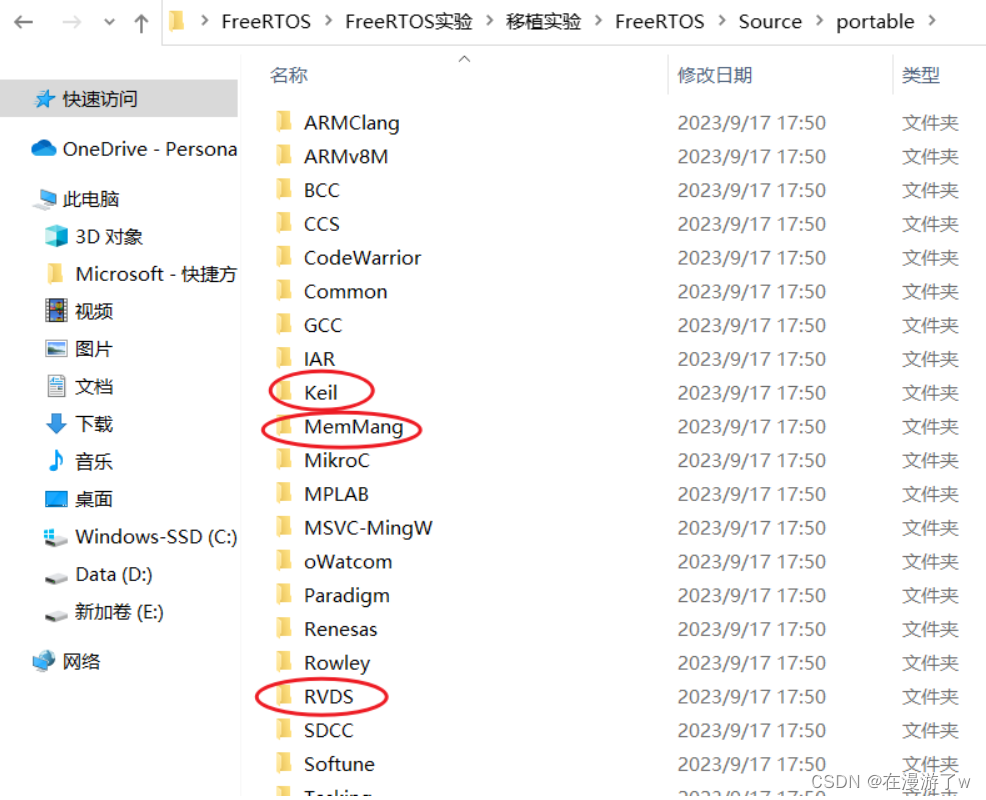
portable文件夹:只保留Keil,RVDS,MemMang这三个文件夹

三、添加源码文件
1、在裸机工程中新建一个名为 FreeRTOS 的文件夹:
2、往FreeRTOS文件夹添加文件
创建 FreeRTOS 文件夹以后就可以把Source文件夹下的源码添加到这个文件夹中了
如图所示:

3、处理portable文件夹
这个文件夹下需要关注的是移植哪种编译环境的文件和管理内存的文件
在本次的学习中使用的是keil环境,“See-also-the-RVDS-directory”其主要参照是在RVDS文件夹中的ARM系列CM3我们只需要留下 keil、 MemMang 和 RVDS,其他可以删除。
四、STM32工程部署
完成源码文件添加后就可以部署工程了
1、向工程分组添加文件
打开裸机工程,新建分组FreeRTOS_CORE、FreeRTOS_PORTABLE,然后向这两个分组中添加文件,如图所示:
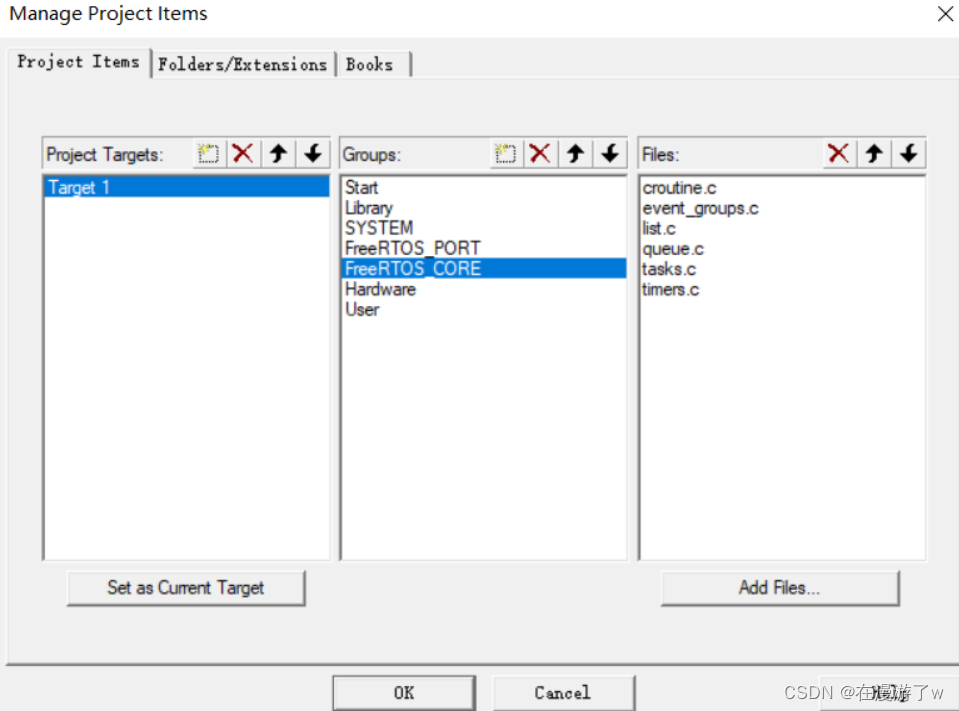
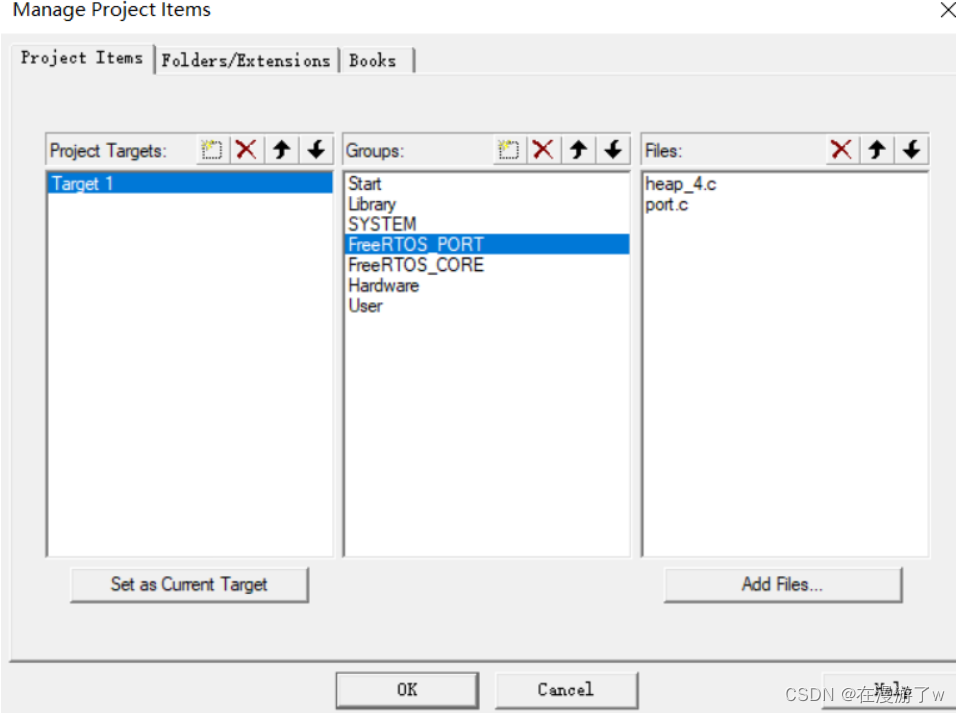
这里需要注意port.c是如果那是F10系列选择ARM_CM3文件夹下的port.c !!!
具体参考:

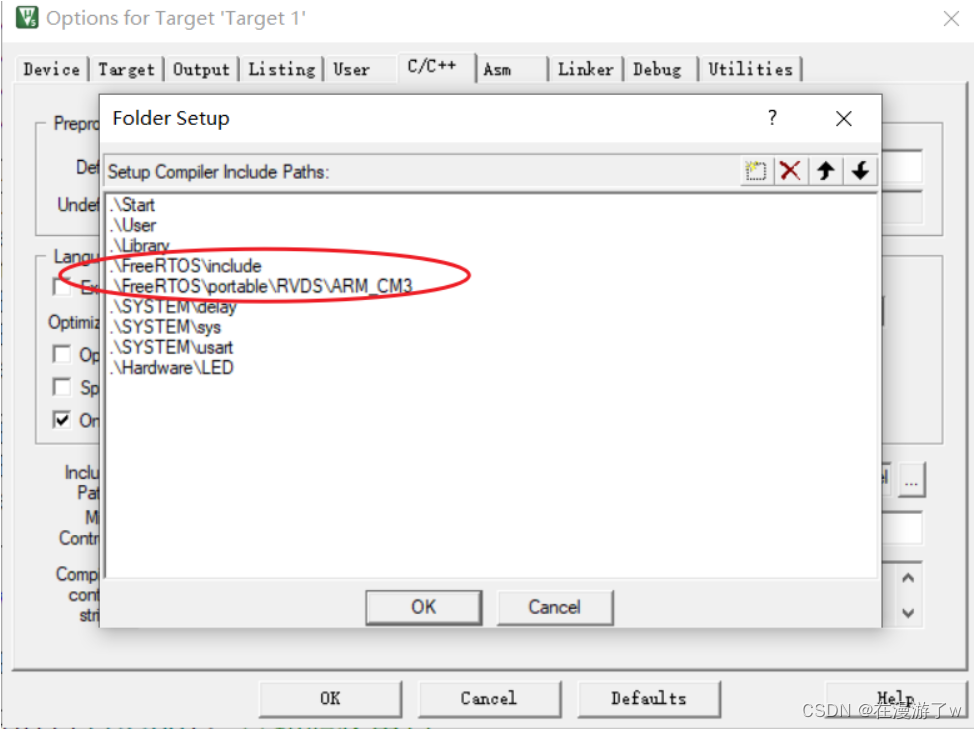
2、添加头文件路径:
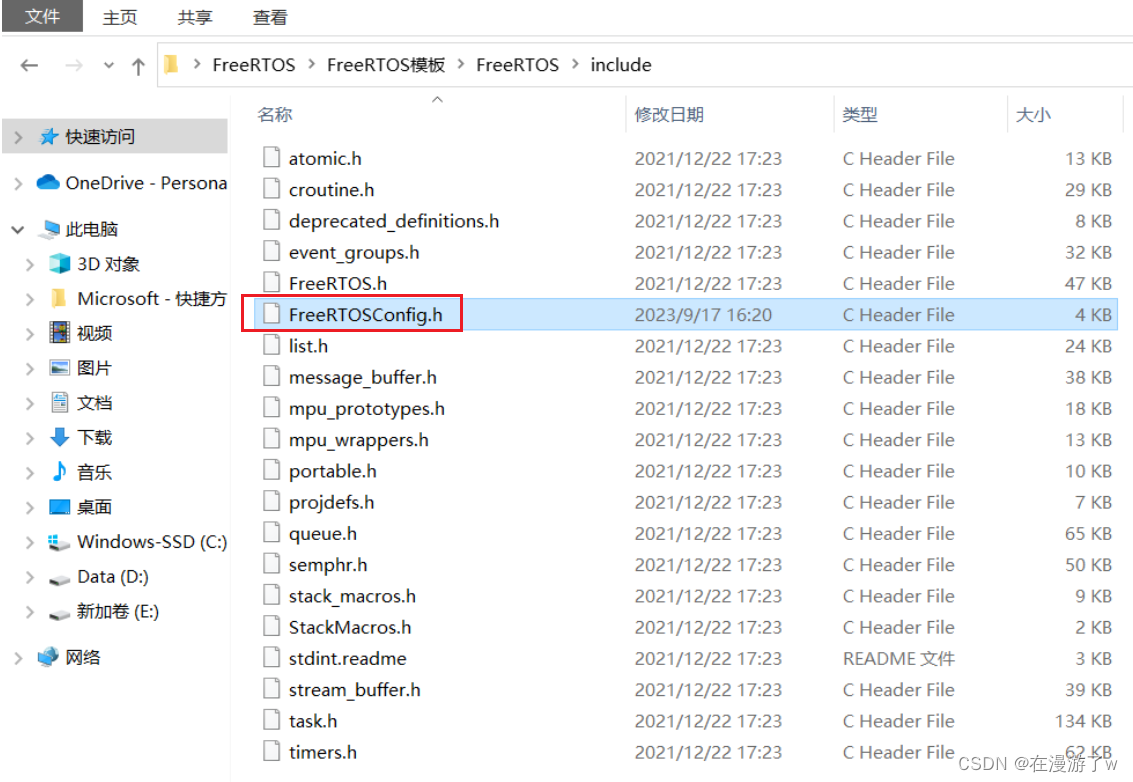
3、添加FreeRTOSConfig.h文件:
STM32F10系列的寻找路径如图所示:

把FreeRTOSConfig.h复制到include文件夹下,如图所示:
五、修改文件
1、在FreeRTOSConfig.h中添加
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler如果你使用了sys、usart,delay文件,移植FreeRTOS时是需要修改的。
2、 修改 sys.h 文件
在 sys.h 文件里面用宏 SYSTEM_SUPPORT_OS 来定义是否使用 OS,我们使用的是 FreeRTOS, 所以应该将宏 SYSTEM_SUPPORT_OS 改为 1。
//0,不支持 os
//1,支持 os
#define SYSTEM_SUPPORT_OS 1 //定义系统文件夹是否支持 OS3、 修改 usart.c 文件
usart.c 文件修改也很简单, usart.c 文件有两部分要修改,一个是添加 FreeRTOS.h 头文件,默认是添加的 UCOS 中的 includes.h 头文件,修改以后如下:
//如果使用 os,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h" //os 使用
#endif另外一个就是 USART1 的中断服务函数, 在使用 UCOS 的时候进出中断的时候需要添加
OSIntEnter()和 OSIntExit(), 使用 FreeRTOS 的话就不需要了,所以将这两行代码删除掉,修改
以后如下:
void USART1_IRQHandler(void) //串口 1 中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0) //接收未完成
{
if(USART_RX_STA&0x4000) //接收到了 0x0d
{
if(Res!=0x0a)USART_RX_STA=0; //接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到 0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;
}
}
}
}
}4、修改 stm32f10x_it
SysTick 中断服务函数是一个非常重要的函数,FreeRTOS 所有跟时间相关的事情都在里面处理,SysTick 就是 FreeRTOS 的一个心跳时钟,驱动着 FreeRTOS 的运行,就像人的心跳一样,假如没有心跳,我们就相当于“死了”,同样的,FreeRTOS 没有了心跳,那么它就会卡死在某个地方,不能进行任务调度,不能运行任何的东西,因此我们需要实现一 个 FreeRTOS 的心跳时钟,FreeRTOS 帮我们实现了 SysTick 的启动的配置:在 port.c 文件 中已经实现 vPortSetupTimerInterrupt()函数,并且 FreeRTOS 通用的 SysTick 中断服务函数也实现了:在 port.c 文件中已经实现xPortSysTickHandler()函数,所以移植的时候只需要我 们在 stm32f10x_it.c 文件中实现我们对应(STM32)平台上的 SysTick_Handler()函数即可。因为在第一步我们添加了xPortPendSVHandler()与 vPortSVCHandler() 函数的宏,那么在 stm32f10x_it.c 中就需要我们注释掉 PendSV_Handler()与 SVC_Handler()这两个函数了,具体看一下代码
#include "stm32f10x_it.h"
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/******************************************************************************/
/* Cortex-M3 Processor Exceptions Handlers */
/******************************************************************************/
/**
* @brief This function handles NMI exception.
* @param None
* @retval None
*/
void NMI_Handler(void)
{
}
/**
* @brief This function handles Hard Fault exception.
* @param None
* @retval None
*/
void HardFault_Handler(void)
{
/* Go to infinite loop when Hard Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Memory Manage exception.
* @param None
* @retval None
*/
void MemManage_Handler(void)
{
/* Go to infinite loop when Memory Manage exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Bus Fault exception.
* @param None
* @retval None
*/
void BusFault_Handler(void)
{
/* Go to infinite loop when Bus Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Usage Fault exception.
* @param None
* @retval None
*/
void UsageFault_Handler(void)
{
/* Go to infinite loop when Usage Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles SVCall exception.
* @param None
* @retval None
*/
//void SVC_Handler(void)
//{
//}
/**
* @brief This function handles Debug Monitor exception.
* @param None
* @retval None
*/
void DebugMon_Handler(void)
{
}
/**
* @brief This function handles PendSVC exception.
* @param None
* @retval None
*/
//void PendSV_Handler(void)
//{
//}
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
extern void xPortSysTickHandler(void);
//systick中断服务函数
void SysTick_Handler(void)
{
#if (INCLUDE_xTaskGetSchedulerState == 1 )
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
#endif /* INCLUDE_xTaskGetSchedulerState */
xPortSysTickHandler();
#if (INCLUDE_xTaskGetSchedulerState == 1 )
}
#endif /* INCLUDE_xTaskGetSchedulerState */
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32f10x_xx.s). */
/******************************************************************************/
/**
* @brief This function handles PPP interrupt request.
* @param None
* @retval None
*/
/*void PPP_IRQHandler(void)
{
}*/
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/5、修改 delay.c 文件
delay_init()是用来初始化滴答定时器和延时函数,FreeRTOS 的系统时钟是由滴答定时器提供的,那么肯定要根据 FreeRTOS 的系统时钟节拍来初始化滴答定时器了, delay_init()就是来完成这个功能的。 FreeRTOS 的系统时钟节拍由宏 configTICK_RATE_HZ 来设置,这个值我们可以自由设置,但是一旦设置好以后我们就要根据这个值来初始化滴答定时器,其实就是设置滴答定时器的中断周期。 滴答定时器的时钟频率设置为AHB,也就是 72MHz!代码如下:
//初始化延迟函数
//SYSTICK 的时钟固定为 AHB 时钟,基础例程里面 SYSTICK 时钟频率为 AHB/8
//这里为了兼容 FreeRTOS,所以将 SYSTICK 的时钟频率改为 AHB 的频率!
//SYSCLK:系统时钟频率
void delay_init()
{
u32 reload;
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);//选择外部时钟 HCLK
fac_us=SystemCoreClock/1000000; //不论是否使用 OS,fac_us 都需要使用
reload=SystemCoreClock/1000000; //每秒钟的计数次数 单位为 M
reload*=1000000/configTICK_RATE_HZ; //根据 configTICK_RATE_HZ 设定溢出
//时间 reload 为 24 位寄存器,最大值;16777216,在 72M 下,约合 0.233s 左右
fac_ms=1000/configTICK_RATE_HZ; //代表 OS 可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启 SYSTICK 中断
SysTick->LOAD=reload; //每 1/configTICK_RATE_HZ 秒中断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启 SYSTICK
}接下来的三个函数都是延时的,代码如下:
//延时 nus
//nus:要延时的 us 数.
//nus:0~204522252(最大值即 2^32/fac_us@fac_us=168)
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD 的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
//这里注意一下 SYSTICK 是一个递减的计数器就可以了.
if(tnow<told)tcnt+=told-tnow;
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
};
}
//延时 nms,会引起任务调度
//nms:要延时的 ms 数
//nms:0~65535
void delay_ms(u32 nms)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
if(nms>=fac_ms) //延时的时间大于 OS 的最少时间周期
{
vTaskDelay(nms/fac_ms); //FreeRTOS 延时
}
nms%=fac_ms; //OS 已经无法提供这么小的延时了,
//采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
//延时 nms,不会引起任务调度
//nms:要延时的 ms 数
void delay_xms(u32 nms)
{
u32 i;
for(i=0;i<nms;i++) delay_us(1000);
}delay_us()是 us 级延时函数, delay_ms 和 delay_xms()都是 ms 级的延时函数, delay_us()和delay_xms()不会导致任务切换。 delay_ms()其实就是对 FreeRTOS 中的延时函数 vTaskDelay()的简单封装,所以在使用 delay_ms()的时候就会导致任务切换。
六、移植验证
- 实验要求:编写简单的 FreeRTOS 应用代码,测试 FreeRTOS 的移植是否成功。 可以直接将本实验代码复制粘贴到自己的移植工程中。
- 实验设计
本实验设计四个任务: start_task()、 led0_task ()、 led1_task ()和 float_task(),这四个任务的任务功能如下:
start_task():用来创建其他三个任务。
led0_task ():控制 LED0 的闪烁,提示系统正在运行。
led1_task ():控制 LED1 的闪烁。
float_task():简单的浮点测试任务,用于测试 STM32F4 的 FPU 是否工作正常。
main函数:
#include "stm32f10x.h"
#include "FreeRTOS.h"
#include "task.h"
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#define START_TASK_PRIO 1 //任务优先级
#define START_STK_SIZE 128 //任务堆栈大小
TaskHandle_t StartTask_Handler; //任务句柄
void start_task(void *pvParameters); //任务函数
#define LED0_TASK_PRIO 2 //任务优先级
#define LED0_STK_SIZE 50 //任务堆栈大小
TaskHandle_t LED0Task_Handler; //任务句柄
void led0_task(void *p_arg); //任务函数
#define LED1_TASK_PRIO 3 //任务优先级
#define LED1_STK_SIZE 50 //任务堆栈大小
TaskHandle_t LED1Task_Handler; //任务句柄
void led1_task(void *p_arg); //任务函数
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组 4
delay_init(); //延时函数初始化
uart_init(115200); //初始化串口
LED_Init(); //初始化 LED
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建 LED0 任务
xTaskCreate((TaskFunction_t )led0_task,
(const char* )"led0_task",
(uint16_t )LED0_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED0_TASK_PRIO,
(TaskHandle_t* )&LED0Task_Handler);
//创建 LED1 任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED0 任务函数
void led0_task(void *pvParameters)
{
while(1)
{
LED0=~LED0;
vTaskDelay(1000);
}
}
//LED1 任务函数
void led1_task(void *pvParameters)
{
while(1)
{
LED1=0;
vTaskDelay(600);
LED1=1;
vTaskDelay(200);
}
}编译并下载代码到 STM32F103 开发板中,下载进去以后会看到 LED0 和 LED1 同时开始闪烁,
LED0 均匀闪烁,那是因为我们在 LED0 的任务代码中设置好的 LED0 亮 1s,灭 1s。
LED1 亮的时间长,灭的时间短,这是因为在 LED1 的任务代码中设置好的亮 600ms,灭 200ms。















 2136
2136











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









