







1. 首先对ZD550SoliWorks文件转出stl格式文件,进行Blender软件导入,完成1000:1比例的缩小。
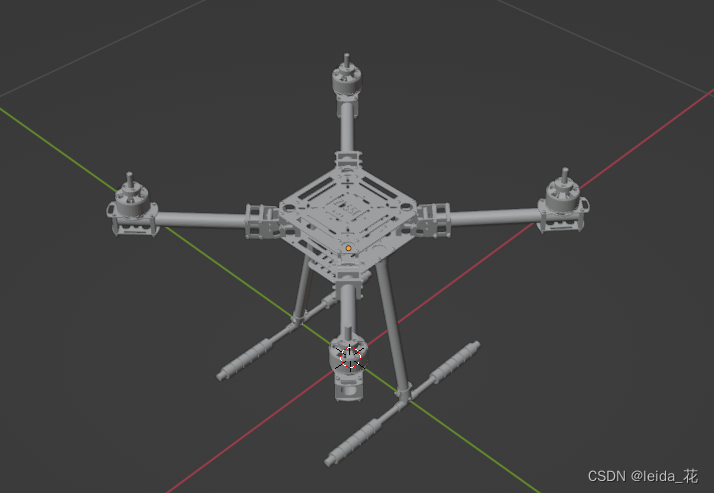
这里注意,对无人机的位置进行调整,让其中心在质心位置的同时,让质心在坐标轴原点0.2m高度处,保证后续对其碰撞区域设置方便。
2.通过Blender软件将上述文件导出为dae文件,进一步参考PX4官方仿真平台的iris模型,对本ZD550平台进行sdf文件编写:https://github.com/PX4/PX4-Autopilot.git
3.具体仿真出来的模型如图。

sdf文件如下:
<sdf version='1.6'>
<model name='Z550'>
<link name='base_link'>
<pose frame=''>0 0 0 0 -0 0</pose>
<inertial>
<pose frame=''>0 0 0 0 -0 0</pose>
<mass>1.5</mass>
<inertia>
<ixx>0.029125</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.029125</iyy>
<iyz>0</iyz>
<izz>0.055225</izz>
</inertia>
</inertial>
<collision name='base_link_inertia_collision_4'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<box>
<size>0.47 0.47 0.005</size>
</box>
</geometry>
<surface>
<contact>
<ode>
<min_depth>0.001</min_depth>
<max_vel>0</max_vel>
</ode>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='base_link_inertia_visual_4'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://Z550/meshes/ZD550_motors_amend.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<link name='/imu_link'>
<pose frame=''>0 0 0 0 -0 0</pose>
<inertial>
<pose frame=''>0 0 0 0 -0 0</pose>
<mass>0.015</mass>
<inertia>
<ixx>1e-05</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1e-05</iyy>
<iyz>0</iyz>
<izz>1e-05</izz>
</inertia>
</inertial>
</link>
<joint name='/imu_joint' type='revolute'>
<child>/imu_link</child>
<parent>base_link</parent>
<axis>
<xyz>1 0 0</xyz>
<limit>
<lower>0</lower>
<upper>0</upper>
<effort>0</effort>
<velocity>0</velocity>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>0</use_parent_model_frame>
</axis>
</joint>
<link name='rotor_0'>
<pose frame=''>0.2 -0.2 0.34 0 -0 0</pose>
<inertial>
<pose frame=''>0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_0_collision'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_0_visual'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://rotors_description/meshes/iris_prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_0_joint' type='revolute'>
<child>rotor_0</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>0</use_parent_model_frame>
</axis>
</joint>
<link name='rotor_1'>
<pose frame=''>-0.2 0.2 0.34 0 -0 0</pose>
<inertial>
<pose frame=''>0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_1_collision'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_1_visual'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://rotors_description/meshes/iris_prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_1_joint' type='revolute'>
<child>rotor_1</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>0</use_parent_model_frame>
</axis>
</joint>
<link name='rotor_2'>
<pose frame=''>0.2 0.2 0.34 0 -0 0</pose>
<inertial>
<pose frame=''>0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_2_collision'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_2_visual'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://rotors_description/meshes/iris_prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_2_joint' type='revolute'>
<child>rotor_2</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>0</use_parent_model_frame>
</axis>
</joint>
<link name='rotor_3'>
<pose frame=''>-0.2 -0.2 0.34 0 -0 0</pose>
<inertial>
<pose frame=''>0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000273104</iyy>
<iyz>0</iyz>
<izz>0.000274004</izz>
</inertia>
</inertial>
<collision name='rotor_3_collision'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.128</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name='rotor_3_visual'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://rotors_description/meshes/iris_prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<script>
<name>Gazebo/DarkGrey</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name='rotor_3_joint' type='revolute'>
<child>rotor_3</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>0</use_parent_model_frame>
</axis>
</joint>
<plugin name='rosbag' filename='libgazebo_multirotor_base_plugin.so'>
<robotNamespace/>
<linkName>base_link</linkName>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='front_right_motor_model' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_0_joint</jointName>
<linkName>rotor_0</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>0</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/0</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='back_left_motor_model' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_1_joint</jointName>
<linkName>rotor_1</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>1</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/1</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='front_left_motor_model' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_2_joint</jointName>
<linkName>rotor_2</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>2</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/2</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='back_right_motor_model' filename='libgazebo_motor_model.so'>
<robotNamespace/>
<jointName>rotor_3_joint</jointName>
<linkName>rotor_3</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1100</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.06</momentConstant>
<commandSubTopic>/gazebo/command/motor_speed</commandSubTopic>
<motorNumber>3</motorNumber>
<rotorDragCoefficient>0.000175</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<motorSpeedPubTopic>/motor_speed/3</motorSpeedPubTopic>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
</plugin>
<plugin name='gps_plugin' filename='libgazebo_gps_plugin.so'>
<robotNamespace/>
<gpsNoise>1</gpsNoise>
</plugin>
<plugin name='magnetometer_plugin' filename='libgazebo_magnetometer_plugin.so'>
<robotNamespace/>
<pubRate>100</pubRate>
<noiseDensity>0.0004</noiseDensity>
<randomWalk>6.4e-06</randomWalk>
<biasCorrelationTime>600</biasCorrelationTime>
<magTopic>/mag</magTopic>
</plugin>
<plugin name='barometer_plugin' filename='libgazebo_barometer_plugin.so'>
<robotNamespace/>
<pubRate>50</pubRate>
<baroTopic>/baro</baroTopic>
</plugin>
<plugin name='mavlink_interface' filename='libgazebo_mavlink_interface.so'>
<robotNamespace/>
<imuSubTopic>/imu</imuSubTopic>
<gpsSubTopic>/gps</gpsSubTopic>
<magSubTopic>/mag</magSubTopic>
<baroSubTopic>/baro</baroSubTopic>
<mavlink_addr>INADDR_ANY</mavlink_addr>
<mavlink_udp_port>14560</mavlink_udp_port>
<mavlink_tcp_port>4560</mavlink_tcp_port>
<serialEnabled>0</serialEnabled>
<serialDevice>/dev/ttyACM0</serialDevice>
<baudRate>921600</baudRate>
<qgc_addr>INADDR_ANY</qgc_addr>
<qgc_udp_port>14550</qgc_udp_port>
<sdk_addr>INADDR_ANY</sdk_addr>
<sdk_udp_port>14540</sdk_udp_port>
<hil_mode>0</hil_mode>
<hil_state_level>0</hil_state_level>
<vehicle_is_tailsitter>0</vehicle_is_tailsitter>
<send_vision_estimation>1</send_vision_estimation>
<send_odometry>0</send_odometry>
<enable_lockstep>1</enable_lockstep>
<use_tcp>1</use_tcp>
<motorSpeedCommandPubTopic>/gazebo/command/motor_speed</motorSpeedCommandPubTopic>
<control_channels>
<channel name='rotor1'>
<input_index>0</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
</channel>
<channel name='rotor2'>
<input_index>1</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
</channel>
<channel name='rotor3'>
<input_index>2</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
</channel>
<channel name='rotor4'>
<input_index>3</input_index>
<input_offset>0</input_offset>
<input_scaling>1000</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>100</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
</channel>
<channel name='rotor5'>
<input_index>4</input_index>
<input_offset>1</input_offset>
<input_scaling>324.6</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>0</zero_position_armed>
<joint_control_type>velocity</joint_control_type>
<joint_control_pid>
<p>0.1</p>
<i>0</i>
<d>0</d>
<iMax>0.0</iMax>
<iMin>0.0</iMin>
<cmdMax>2</cmdMax>
<cmdMin>-2</cmdMin>
</joint_control_pid>
<joint_name>zephyr_delta_wing::propeller_joint</joint_name>
</channel>
<channel name='rotor6'>
<input_index>5</input_index>
<input_offset>0</input_offset>
<input_scaling>0.524</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>0</zero_position_armed>
<joint_control_type>position</joint_control_type>
<joint_name>zephyr_delta_wing::flap_left_joint</joint_name>
<joint_control_pid>
<p>10.0</p>
<i>0</i>
<d>0</d>
<iMax>0</iMax>
<iMin>0</iMin>
<cmdMax>20</cmdMax>
<cmdMin>-20</cmdMin>
</joint_control_pid>
</channel>
<channel name='rotor7'>
<input_index>6</input_index>
<input_offset>0</input_offset>
<input_scaling>0.524</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>0</zero_position_armed>
<joint_control_type>position</joint_control_type>
<joint_name>zephyr_delta_wing::flap_right_joint</joint_name>
<joint_control_pid>
<p>10.0</p>
<i>0</i>
<d>0</d>
<iMax>0</iMax>
<iMin>0</iMin>
<cmdMax>20</cmdMax>
<cmdMin>-20</cmdMin>
</joint_control_pid>
</channel>
<channel name='rotor8'>
<input_index>7</input_index>
<input_offset>0</input_offset>
<input_scaling>0.524</input_scaling>
<zero_position_disarmed>0</zero_position_disarmed>
<zero_position_armed>0</zero_position_armed>
<joint_control_type>position</joint_control_type>
</channel>
</control_channels>
</plugin>
<static>0</static>
<plugin name='rotors_gazebo_imu_plugin' filename='libgazebo_imu_plugin.so'>
<robotNamespace/>
<linkName>/imu_link</linkName>
<imuTopic>/imu</imuTopic>
<gyroscopeNoiseDensity>0.00018665</gyroscopeNoiseDensity>
<gyroscopeRandomWalk>3.8785e-05</gyroscopeRandomWalk>
<gyroscopeBiasCorrelationTime>1000.0</gyroscopeBiasCorrelationTime>
<gyroscopeTurnOnBiasSigma>0.0087</gyroscopeTurnOnBiasSigma>
<accelerometerNoiseDensity>0.00186</accelerometerNoiseDensity>
<accelerometerRandomWalk>0.006</accelerometerRandomWalk>
<accelerometerBiasCorrelationTime>300.0</accelerometerBiasCorrelationTime>
<accelerometerTurnOnBiasSigma>0.196</accelerometerTurnOnBiasSigma>
</plugin>
</model>
</sdf>完成这一过程中间,本来是设计了一套桨叶的,但使用该桨叶仿真时,需要对系统的PID参数重新调整,否则起飞过程飘忽不定。
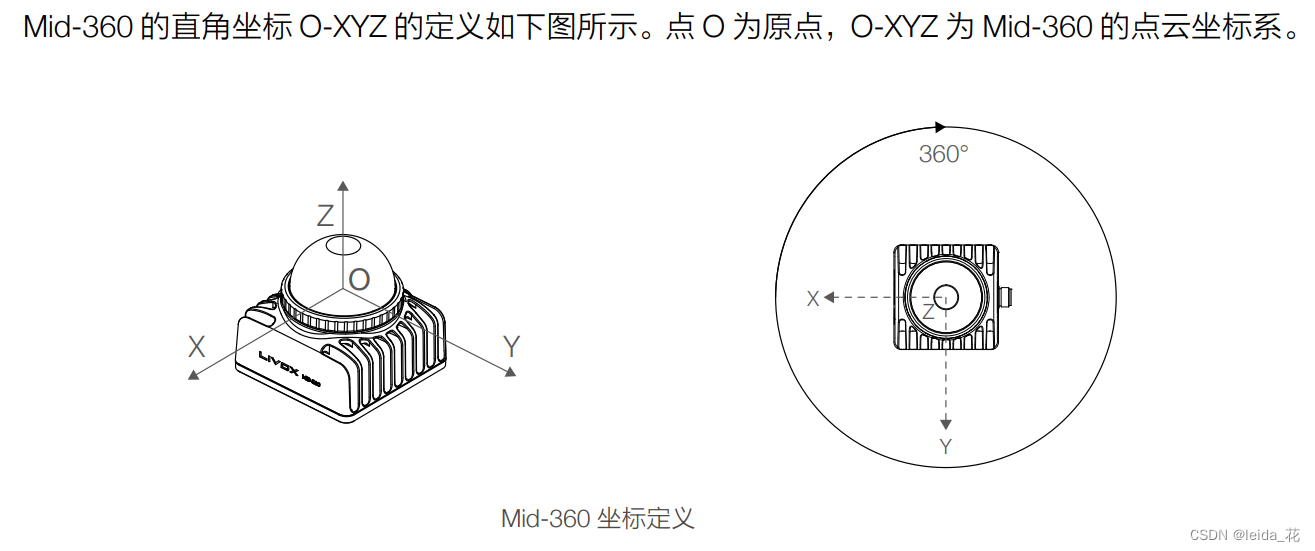
4. 通过到Mid360官网(Downloads - Mid-360 激光雷达 - Livox)下载模型文件,按照上述步骤导出dae文件,注意Mid360的坐标系。
5. 根据肖昆大佬的xtdrone文档进行Mid360的插件布置,三维固态激光SLAM(livox) · 语雀
配置好的Mid360sdf文件为:
<sdf version='1.6'>
<model name='Mid360'>
<link name='livox_base'>
<pose frame=''>0 0 0 0 -0 0</pose>
<inertial>
<pose frame=''>0 0 0 0 -0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>0.02</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.02</iyy>
<iyz>0</iyz>
<izz>0.02</izz>
</inertia>
</inertial>
<collision name='livox_base_collision'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://livox_mid40/meshes/livox_mid40.dae</uri>
</mesh>
</geometry>
</collision>
<visual name='livox_base_visual'>
<pose frame=''>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://livox_mid40/meshes/mid360_rules.dae</uri>
</mesh>
</geometry>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<sensor name='laser_livox' type='ray'>
<visualize>1</visualize>
<update_rate>10</update_rate>
<always_on>1</always_on>
<plugin name='gazebo_ros_laser_controller' filename='liblivox_laser_simulation.so'>
<ray>
<scan>
<horizontal>
<samples>100</samples>
<resolution>1</resolution>
<min_angle>-0.614355377778</min_angle>
<max_angle>0.614355377778</max_angle>
</horizontal>
<vertical>
<samples>50</samples>
<resolution>1</resolution>
<min_angle>-0.673696522222</min_angle>
<max_angle>0.673696522222</max_angle>
</vertical>
</scan>
<range>
<min>0.1</min>
<max>200.0</max>
<resolution>0.002</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<visualize>1</visualize>
<samples>10000</samples>
<downsample>1</downsample>
<csv_file_name>/home/ywb/PX4_Files/PX4_Firmware/Tools/sitl_gazebo/models/livox_mid40/scan_mode/mid360.csv</csv_file_name>
<ros_topic>/scan</ros_topic>
</plugin>
<pose frame=''>0 0 0 0 -0 0</pose>
</sensor>
</link>
</model>
</sdf>(1)刚开始打算按照XTdrone给出的Livox文件进行修改,将自己的dae文件放置进去,将碰撞模型和可视化模型均改为mid360.dae,仿真发现会出现卡顿的情况,目前还没有解决。暂时是使用了文档中提到的livox_mid40.dae作为碰撞参考,可视化部分还是使用mid360.dae文件。
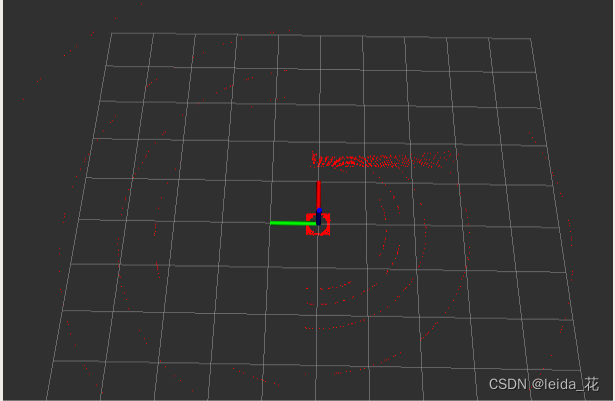
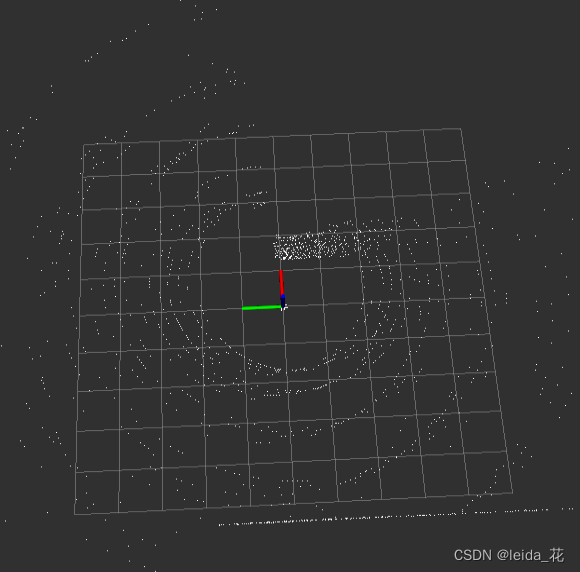
(2)当时启动gazebo,仿真的mid360模型文件存在,但并没有点云数据,通过查看终端,发现是 mid360插件不能找到mid360.csv文件,然后最后通过写入绝对路径的方法成功仿真出点云数据,这里将PX4官方提供的velodyne的点云和mid360仿真的点云做了个大致对比,整体效果还行。

Velodyne:
Mid360:
6. 最后将Mid360固定到ZD550平台上,最后的ZD550_Mid360平台sdf文件:
<?xml version="1.0"?>
<sdf version="1.6">
<model name="Z550_Mid360_down">
<include>
<uri>model://Z550</uri>
</include>
<include>
<uri>model://Mid360</uri>
<pose>0 0 0.155 3.1415926 0 0</pose>
</include>
<joint name="3Dlidar_joint" type="revolute">
<child>Mid360::livox_base</child>
<parent>Z550::base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<upper>0</upper>
<lower>0</lower>
</limit>
</axis>
</joint>
</model>
</sdf>最终的仿真效果如下

上述文件地址:https://download.csdn.net/download/weixin_52814031/88541781?spm=1001.2014.3001.5503















 3359
3359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











